基于RTK三维水深测量技术的多波束测深系统设计
2022-08-19 04:08应超然
水利科技与经济 2022年8期
应超然
(浙江省水利河口研究院(浙江省海洋规划设计研究院), 杭州 310020)
0 引 言
多波束测探系统中融合多种高新技术,其中包含水声学技术、电子及计算机技术、现代数字信号处理技术等。该系统实质上是一个条带覆盖测深系统,其中包含n条同步波束,构成一个扇面,在应用时,通过声波发射和接收换能器进行发射、接收,从而获取高密度水深数据。较单波束的探测仪测量范围大,并且比其测深速度快,精度也较单波束的高。但是在测量过程中,会受到潮时差和潮差比等潮汐变化对水面高度的影响,探测过程中需要对验潮站水位控制,该参数的测量多为专职人员测量,这种测量方法不仅会增加工作成本,还会由于人为测定误差导致后期探测结果不准确。RTK即载波相位差分技术是一种智能信息处理技术,该技术在三维水深测量领域获得应用,并且也得到较好的应用效果。该技术能够对不一致的、不完整的数据做处理,直到挖掘到其中有用的信息后再停止计算,在挖掘后还能够将有用的信息以简洁的方式呈现给工作人员。基于RTK三维水深测量技术的这个优点,设计一个基于RTK三维水深测量技术的多波束测深系统,期望提高测量的效果。
1 多波束测深系统硬件设计
多波束测深系统硬件框架见图1。
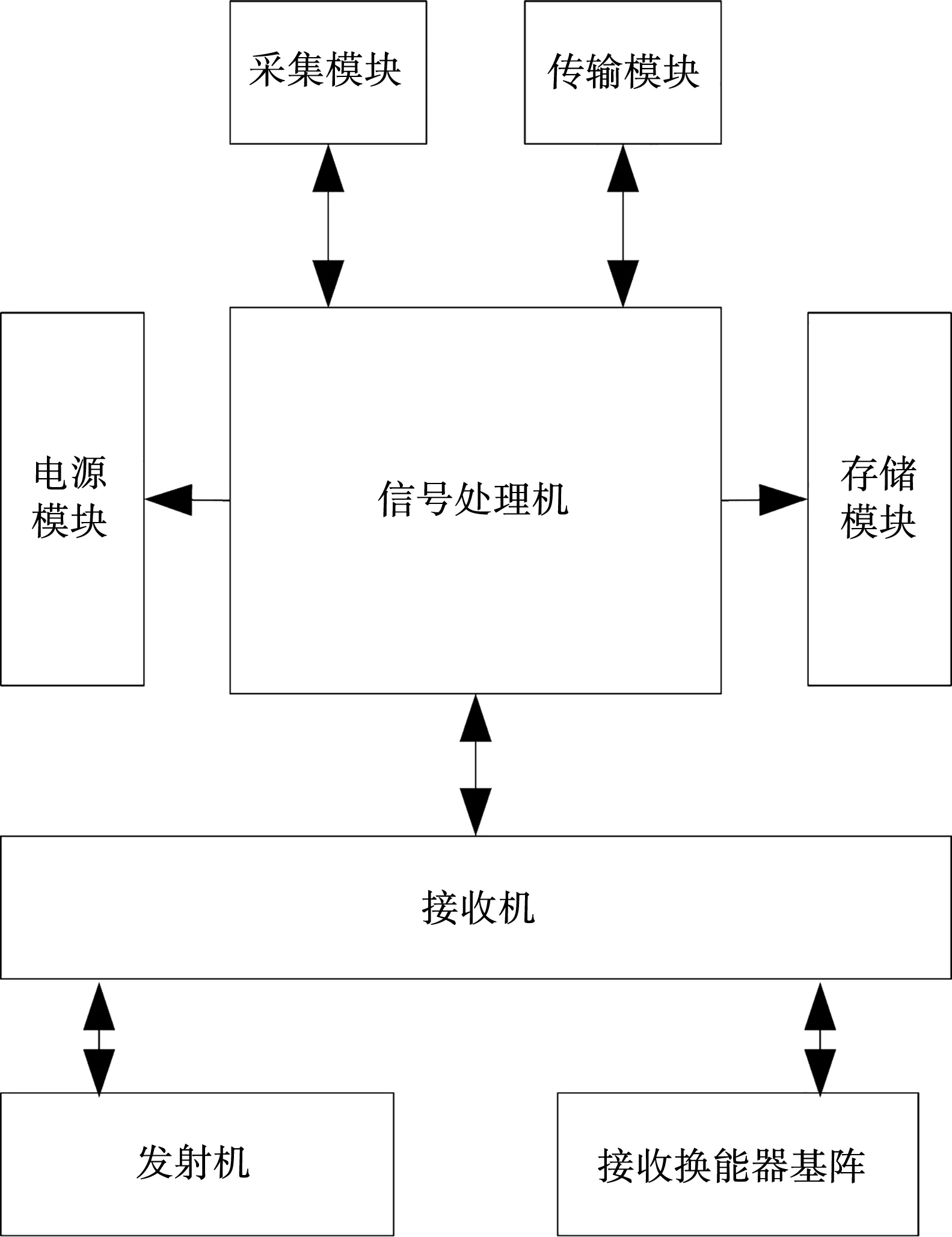
图1 多波束测深系统硬件框架
通过图1可知,系统中主要由处理机、信号源、发射机、接收机、采集模块等组成,此次研究主要对接收机、采集模块、电源模块与数据发送模块进行设计。
1.1 接收机电路设计
接收机主要对海底反射回来的回波信号处理[1],并能够将处理完成的信息发送到多通道采集系统中。接收机电路设计中采用AD8336芯片,该芯片具有高线性、单端输入、微弱噪声的特点,并具备以下性能:①增益缩放比例为50 dB/V;②供电电源电压为3~12 V;③正常工作温度范围为-50℃~125℃;④可以设定增益范围。
该芯片主要由电源供电接口以及增益控制接口等组成,在实际应用中,可以根据系统的使用需求,对芯片的端口电阻值进行改变[2],以达到改变芯片输出电压范围的目的。具体实现方法见表1。

表1 芯片增益范围
通过表1可知,可以对前端放大器放大倍数改变得到最终需要的输出增益范围。
1.2 电源模块
电源模块对系统起到可靠性与安全性的作用。此次研究采用某公司生产的电源管理芯片[3],型号为TPS75501KTTR,该芯片输出电压范围较广,能够达到1.22~5 V。当电流减小至10 uA时,芯片会停止工作,保护电路。
由于电路存在高频特性,若长时间应用会使其过热,严重情况下还会影响其使用寿命,为此设置电压监视芯片,以提供长期稳定的电源。采用TPS3307-33进行监视,主要特点如下:
1) 在使用时不需要在外接电阻[4],因为其自身带一个20ms的延时复位。
2) 工作温度范围广。
3) 电压温度补偿,占用PCB的面积少。
4) 适用多电压处理体系,该芯片能够同时对3个电压监控。
1.3 采集模块设计
采集模块能够将采集的信号传递给系统进行后续处理。在采集模块设计中使用FPGA子卡[5],通过对母板变换就能够实现不同的功能,特点如下:
1) 包含8个时钟锁相环,并包含嵌入式存储器。
2) 包含528个通用用户I/O。
3) 6 k~150 k的逻辑单元。
4) 存储速度高达200 MHz。
该器件功耗较低,并且具有高运算速度、高内存的优点,能够满足系统设计需求。
1.4 数据发送模块设计
在数据发送时采用CY7B923高速数据发送芯片,该芯片集成度高、功耗低,外围电路结构简单[6]。主要特性如下:
1)在进行应用时,支持多种传输协议[7]。
2)正常运行时,两种编码方式,能够直接传输不进行编码,还可以对数据编码编制成传输码。
3)支持光纤以及同轴电缆接口。
4)提供3种传输速率,可以根据用户自身需求选择低速、标准和高速.
5)具有较强的自检能力。
该芯片主要功能是将并行输入数据转换成串行差分位流输出,在高速传输过程中,为增强抗干扰的能力,可以采用适当的耦合方式,实现信号的传输。
2 基于RTK的多波束测深系统软件设计
2.1 三维姿态改正
RTK三维水深测量技术预先采用RTK测量得到GPS天线的三维坐标,在采用RTK技术测量水深,经过同步换算得到水深值,以完成水下地形数据的获取[8]。其测量原理见图2。
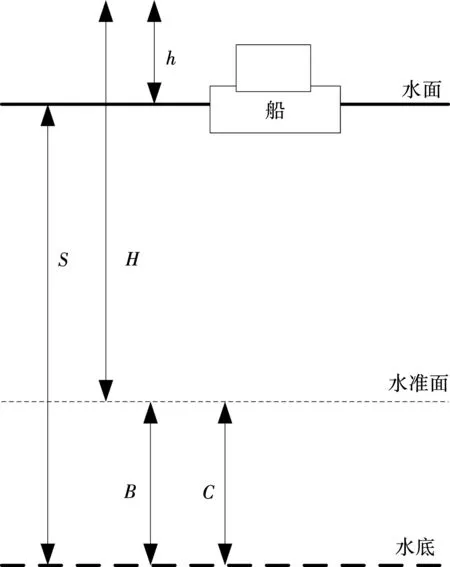
图2 RTK三维水深测量原理
图2中,H代表高程数据;h代表GPS天线到水面的高度;S代表探测仪测量的深度数据;B代表水深值;C代表水底高程。
以上简要介绍了RTK三维水深测量的过程,但是为了实现最优位置的有效判断,还需要在探测过程中做详细处理。
首先,初始化处理RTK技术的算子方差,将其表示为:
(1)

然后,在算子方法初始化处理过程中,进行多次处理。随着迭代次数的增加,会影响计算效果,为此需要不断调整。在调整过程中,计算每个子群的适应度值,计算公式为:
(2)

最后,将上述计算得到的结果按照大小顺序对探测得到的数据动态排序,排序后对数据转换:
(3)
式中:ΔX、ΔY、ΔZ为数据变换过程中的平移参数;εX、εY、εZ分别为旋转参数;ZS、YS、XS为源空间的直接坐标值。
通过上述过程对数据进行初始变换,但在计算过程中会受到潮流动态性的影响,导致计算结果不准确,为此需要做进一步的处理。
2.2 基于RTK的多波束测深实现
由于数据在采集过程中会受到仪器噪声、海况等情况的影响,使采集到的数据存在误差,从而使后续探测结果出现误差。为此,需要对测深数据编辑,剔除粗差,将真实数据保留下来,数据处理过程见图3。
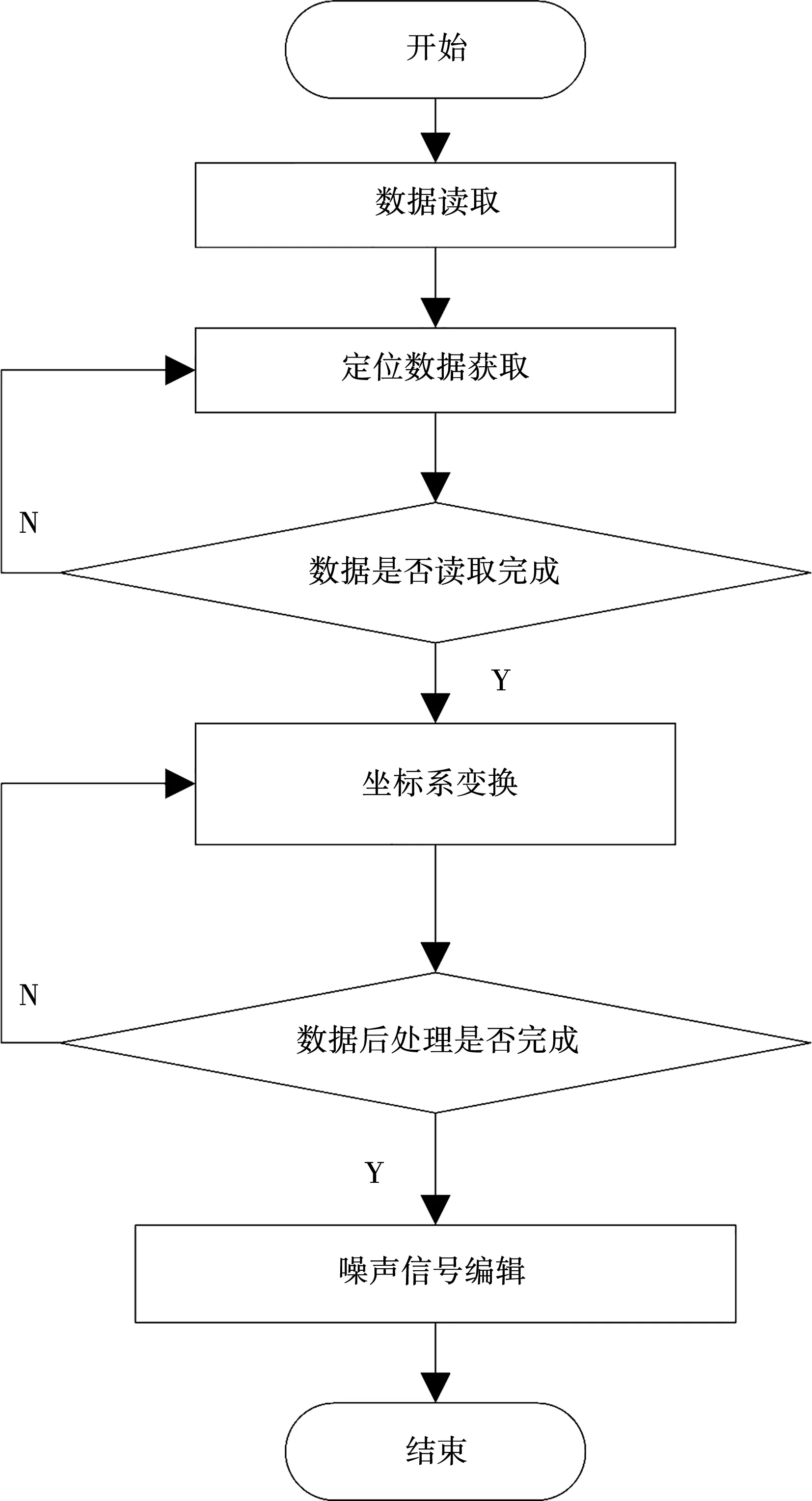
图3 数据处理过程
同时,对系统动态潮位改正,使潮位之间在各维速度方面彼此独立,以实现动态调整。计算公式如下:
(4)
其中:
(5)
Gd(t)=0;Td=Td/k2
式中:k1、k2分别为常数;vid(t)为调节次数;Td为在第d维时数据的动态调整次数;E为阈值修正频率。
基于上述过程,能够保证算法得到全局最优解,直到得到最优的计算结果才停止计算,以此完成潮流误差修正,完成多波束测探系统软件的设计。
3 实例分析
为验证基于RIK三维水深测量技术的多波束测深系统的有效性,以某海湾为实验对象,该海湾内共有6条航道,该河段顺直、河宽小,两岸地形较为平缓,方便实验。
3.1 实验准备
在实验之前,做好准备工作。实验设备清单见表2。

表2 实验设备清单
在三维激光扫描仪安装上,需要采用精密的安装支架,将其与接收机安装在一起,使各个实验设备形成一个整体。并且需要保证各个设备的稳定性,保证测量数据不受到影响。
在实验中,将多波束测深仪器安装到船体的左侧,将其与船体上的螺丝与扣环固定连接,使其在船舶发生抖动时保证稳定性;将电源作为发电机,同时采用额定功率为700 W的UPS对发电机输出电源稳压处理;在数据采集上,将基站架设到试验区域的最高点,保证该仪器周围没有明显的遮挡物,没有电信号的干扰。测深数据采集过程见图4。

图4 测深数据采集过程
为使实验结果更具对比性,预先采集该探测区域内的数据,同时为了保证结果对比严谨,采集10次数据,取其平均数作为对比的实际数据。
3.2 测深精度对比
采用所提出的系统对该实验海湾内6个航道深度测量,为了增加对比性,先在距离基准站较近位置实验。深度测试结果见图5。
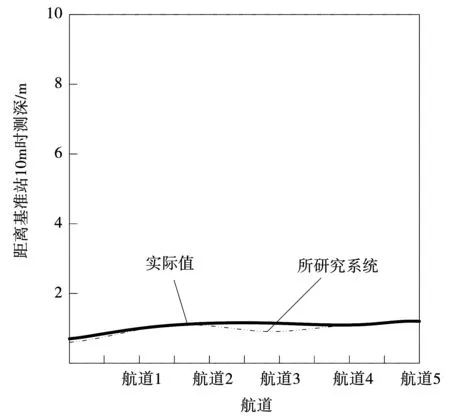
图5 距离基准站10 m时深度对比结果
在此基础上,对比距离基准站为40km时深度测量的精度,见图6。
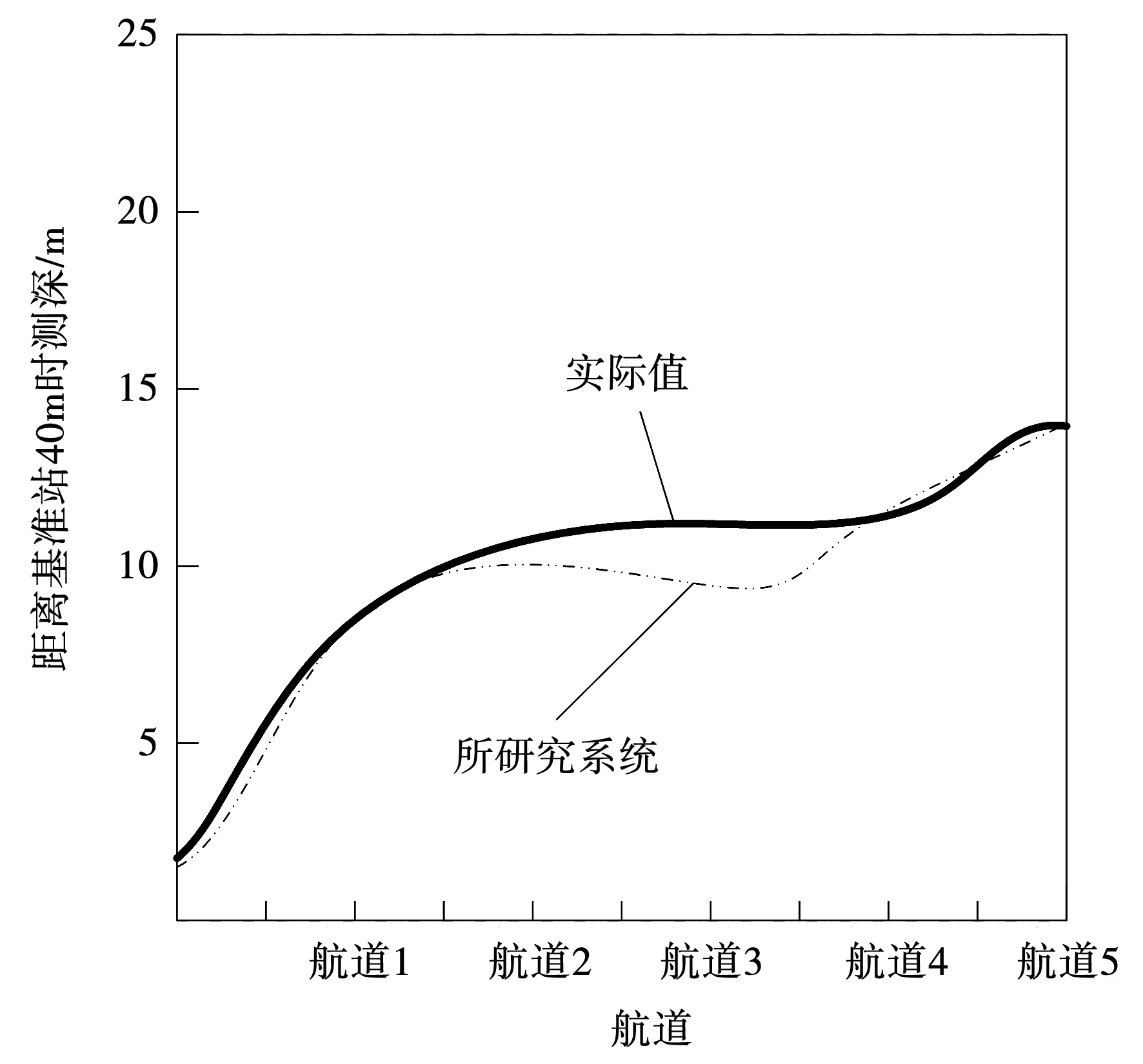
图6 距离基准站40 m时深度对比结果
分析图5和图6能够看出,在距离基站10 m时,所提出的多波束测深系统与实际的深度值相差较小;在距离基站40 m时,所提出系统的测深结果与实际值的差值虽有增多的情况,但是误差最多不多于0.3 m。虽然基准站和观测条件变差,所提出的系统也能够保证较高的测深精度。
3.3 测深效率对比
进一步对比测深系统的应用效果,分析该系统的测深效率,结果见表3。
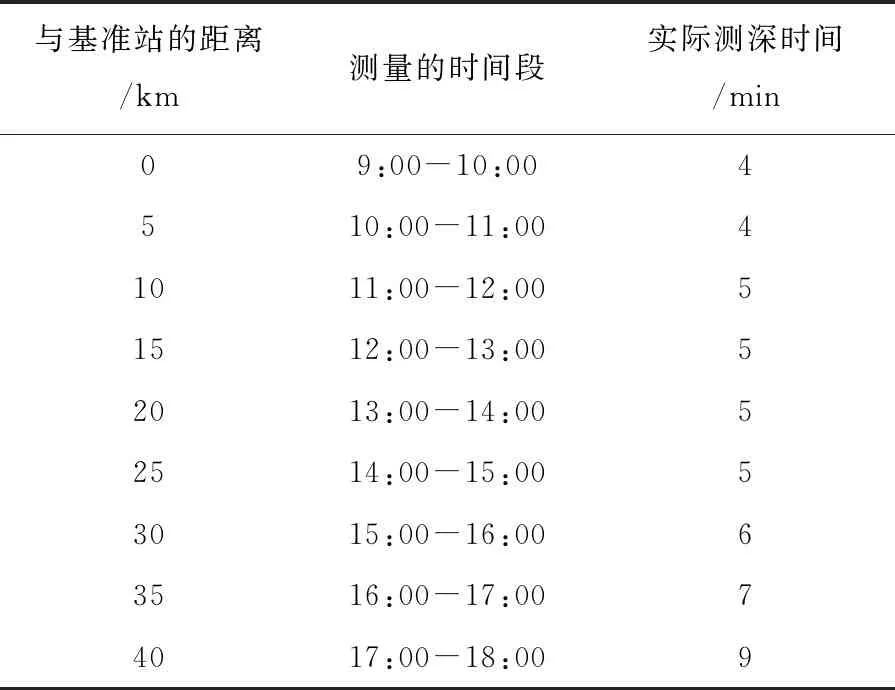
表3 测深效率分析
通过分析表3能够发现,在深度测量上,所提出的系统在距离基准站0 m、时间为9:00-10:00时花费的时间是最少的;随着基准站距离增加,测量时间越来越晚,测深的时间也随之增加。这说明测深系统会受到测量时间段的影响,但是增加的时间较少,效率仍然较高,在可以接受的范围内。
4 结 语
本文完成了测深系统的设计,并在实验部分验证了该系统的有效性。同时,也能够证明RTK三维水深测量技术的应用是有效的,不仅提高了测量的精度,还提高了测量的效率。实验结果表明,应用RTK技术后有效提高了测深效果,完成了多波束测深系统的设计目标,能够为多波束测深系统在实际应用中提供一定的帮助。
猜你喜欢
河北水利(2022年10期)2022-12-29
环球时报(2022-09-29)2022-09-29
信息通信技术(2022年2期)2022-05-31
海洋通报(2022年1期)2022-04-29
发明与创新(2021年17期)2021-07-05
军民两用技术与产品(2021年12期)2021-03-09
成都信息工程大学学报(2021年6期)2021-02-12
舰船科学技术(2020年3期)2020-04-22
小学生作文选刊·中高年级版(2017年10期)2017-11-07
舰船科学技术(2015年8期)2015-02-27