基于D-S可信度加权模型的高密度脉冲噪声识别算法*
2022-08-18 14:34马晓剑李梦娜王金凤
传感技术学报 2022年6期
马晓剑,李梦娜,王金凤
(东北林业大学理学院,黑龙江 哈尔滨 150040)
在大数据时代,许多领域需要采集海量图像数据进行分析,人类对图像质量的要求也愈来愈高[1-3]。但是当图像传感器设备不完善、传输信道受到干扰或者图像解码时都会在结果图像中引入脉冲噪声,这为特征提取、图像分割、图像识别等后期图像处理带来麻烦。
当图像被脉冲噪声污染时,噪声出现的位置和强度都是随机的,同时被改变的像素值可能是0、255或者接近它们的极端值,这恰好体现了不确定性问题的两个特征:随机性和模糊性。因此,图像脉冲噪声的检测过程可以视作是一种对不确定性信息进行决策的过程,是对噪声像素和非噪声像素进行判断的过程。
经典的脉冲噪声消除方法是标准中值滤波(SM)[4]和它的改进算法[5-8],它们是较为常用的抑制脉冲噪声的方法,可以有效地去除噪声。但是由于没有事先对噪声进行判断就对所有像素进行处理,导致非噪声点也被改变,去噪后的图像细节被弱化,图像质量下降。基于决策的DBA算法[9]针对这一问题在中值滤波的基础上加入了噪声判断的步骤,即利用当前像素是否是窗口内的极值来判断是否是噪声,虽然消噪效果有了明显提高,但是当前像素是图像细节信息时,仍然存在被误判成噪声的问题。另外,这种算法随着噪声密度的提高,消噪后的图像还会出现条纹现象。BDND算法[10]则通过对修复窗口像素进行聚类,根据当前像素处是否处在中间类来做出决策,判断是否是噪声。NSBMF[11]等开关消噪算法也采取先检测噪声,再根据检测结果给出噪声的消噪方法,这样可以将非噪声点尽可能地保留下来,以便达到在降噪的同时保留图像细节信息的目的,但是遗憾的是,这些方法对高浓度噪声图像的处理结果不尽如人意。
近些年多传感器信息融合技术在解决探测、跟踪和目标识别等问题方面发展十分迅速[12-14]。由于脉冲噪声的随机性和模糊性,导致中值滤波等很多非线性滤波方法不能对噪声和非噪声做出相对准确的判断,从而影响接下来消除噪声的效果。多传感器信息融合技术中表现较为优越的D-S证据理论就可以有效地表示和处理不确定信息,它被广泛地应用在故障诊断,分类决策和图像识别等领域。ASMF-DBER算法[15]就利用脉冲噪声的极值性和非连续性来表示两个基本概率指派(Basic Probability Assignment,以下称BPA),然后利用D-S证据理论进行信息融合,给出了判断脉冲噪声的一种新思路,获得了较好的结果。遗憾的是当前像素如果处在明暗交界和图像纹理等体现图像细节的位置时,或者图像被高密度噪声污染时,利用该方法检测噪声时往往会出现证据之间的高冲突,导致信息融合结果不正确,进而影响噪声点的判别。
本文对ASMF-DBER算法进行改进,提出了一种基于D-S证据理论可信度加权模型的处理高密度脉冲噪声的新方法。实验结果表明,该方法有效。
1 噪声模型与证据理论
1.1 噪声模型
本文使用文献[10]中的噪声模型,处理的图像均是8位灰度图像,即图像像素点的灰度值范围为[0,255]。图像被脉冲噪声污染后,噪声点0和255出现的概率分别是p1和p2,其概率密度函数如下:
式中:xi,j和Si,j分别为噪声图像和原始图像中处在第i行,第j列位置的像素点和信号点,p=p1+p2为图像噪声的浓度,且p1≠p2。
1.2 证据理论基本知识
定义1[16]若Θ={θ1,θ2,…,θl}是由l个两两互斥元素组成的有限的完备集合,则称Θ为辨识框架。
由辨识框架Θ所有子集组成的集合称为Θ的幂集,记为2Θ,它可以表示为以下形式:

对于噪声检测问题,识别框架Θ可以看作是噪声点N和信号点S的集合,即Θ={N,S}。
定义2[16]设Θ是辨识框架,对于∀A∈Θ,若存在一个函数m:2Θ→[0,1]满足m(φ)=0和,则称m为识别框架Θ上的一个基本概率指派(Basic Probability Assignment,BPA),m(A)为A的基本概率赋值,它描述了对A的支持程度。若m(A)>0,则称A为Θ上的BPA的焦元。
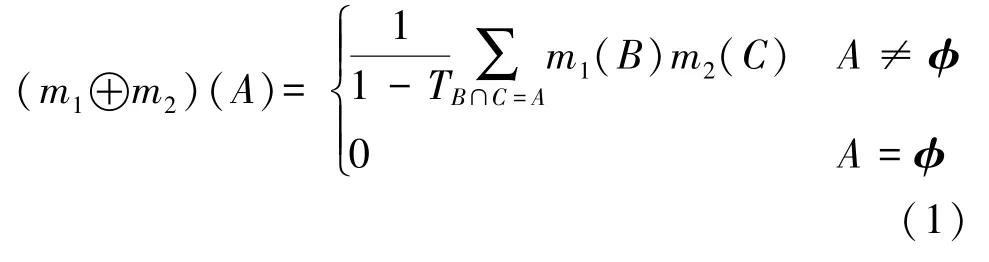
不同的BPA可按D-S证据理论融合规则进行信息融合[16]:
由于脉冲噪声的判断是决策问题,本文将利用可传递信度模型(TBM)中的Pignistic概率函数BetP,它可以将BPA转化为概率用于决策是否是噪声,其形式如下[17]:

这里的|A|表示焦元A的基数。
2 ASMF-DBER算法与分析
证据理论被广泛应用于风险评估、目标识别、故障诊断等很多领域,事实上,这些问题都可以归结为决策问题,判断噪声也是一种决策问题,将证据理论应用到噪声判断的文献还很少,值得探讨的问题还很多,其中张哲[15]等人在这方面做了突出的工作,他们在2018年提出了ASMF-DBER算法。这种算法总结出脉冲噪声具有两个准则,分别是极值准则和非连续性准则,对应这两个准则利用证据理论提出两种BPA,形式如下:
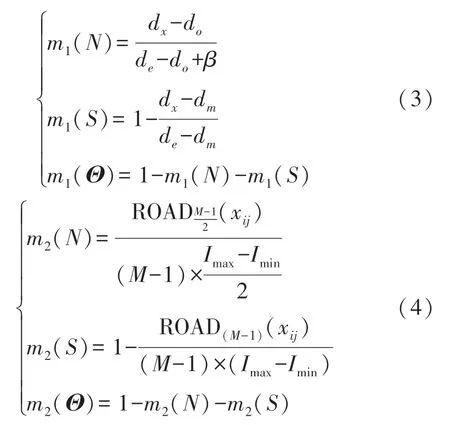
在式(3)中为避免m1(N)分母为零,β取0.1。利用单个像素点x与区间~I之间的距离公式[18]

可以知道dx表示当前像素点xij与待检测图像~I=[Imin,Imax]的距离,do表示当前窗口中距离127.5最近的像素点与~I的距离,de表示255或0与~I的距离,dm表示待检测图像的像素强度中值与~I的距离。此外,Imin和Imax表示待处理图像中像素的最小值和最大值。式(4)中M为当前窗口内像素点的个数,ROAD[19]是将当前像素点xij与窗口内其他像素的差值求绝对值,再升序排序后,取前n个的和得到的。
ASMF-DBER算法将两组基本概率指派函数m1和m2按照式(1)进行融合,获得用于噪声检测的概率指派函数,再根据式(2)进行概率转换,最终将融合后的概率指派函数转换为BetP,当BetP≥0.5时,视当前像素点为噪声点N,反之为信号点S。
该算法根据证据理论为噪声检测提出了新思路,但是这种算法也存在几个问题,主要表现为在以下三种情况下根据两准则会出现高冲突的信息,不能为决策提供有效依据,具体如下:
情况1当前窗口内均为噪声点时,这种情况常见于高密度噪声污染的图像中。(见图1),此时,有dx≡do,由式(3)得,m1(N)≡0,m1(S)=0,m1(Θ)=1,说明当前像素点既不是噪声也不是信号,这显然与实际情况相悖,因此,对于被高密度噪声污染的图像,式(3)的有效性还需要进一步分析。
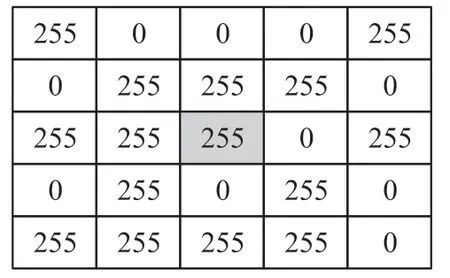
图1 窗口内均为噪点
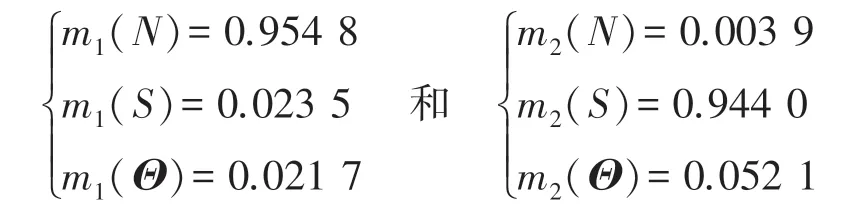
情况2当前像素是噪声,窗口相邻信号像素(斜体加粗部分)高度相似,见图2(也可见文献[15]),由式(3)和式(4)得到
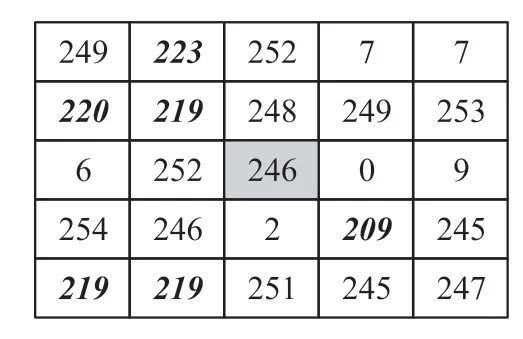
图2 窗口内多数像素与当前像素相似

式中:m1更倾向于认为当前像素为噪声,但是m2则认为应该是信号点,两种证据给出的决策相互矛盾,利用融合规则给出最终的决策结果是噪声,此时,根据该算法得到的BetP=0.543 2。
情况3当前窗口处于图像明暗交界处时,见图3(也可见文献[15]),待检测像素是靠近边缘的黑暗区域中的一个信号,在边缘的另一边的像素有更高的强度,则有
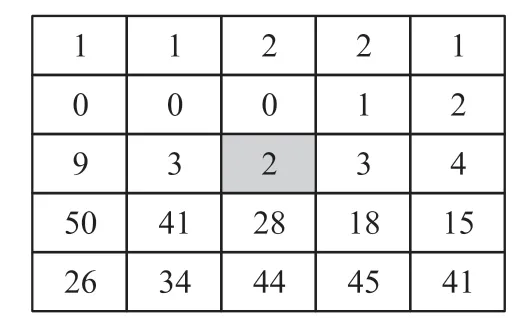
图3 窗口在图像明暗交界处
显然,两种BPA的判断结果仍然产生冲突,且该冲突程度比情况二更为严重,文献[15]对这一情况不能做出准确的判断。
3 本文的算法
3.1 证据理论可信度加权模型的图像脉冲噪声检测
针对情况一,本文发现之所以会出现判断失效是因为在图像被高密度噪声污染时,当前窗口也几乎被噪声污染,此时的dx和do必然相等,于是本文给出修正后的m1(N)(见式(5))。
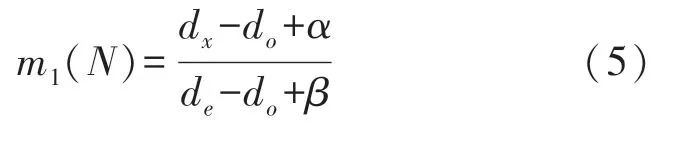
式中:α=0.1。在当前窗口内均为噪声点时(如图1),m1(N)≡1,这样由极值准则可以准确识别出噪声点,从而解决了ASMF-DBER算法在出现情况一时噪声判别失效的问题。
为解决情况二和情况三提到的脉冲噪声检测阶段的冲突问题,本文引入冲突系数K(见式(6))来量化证据的冲突程度,

这里

式中:|·|为焦元的势,c(m1,m2)表示m1和m2之间的相关程度,它的取值介于0和1之间,因此K(m1,m2)也是介于0和1之间的数,它的取值越大则表示m1和m2之间的冲突越大,当K(m1,m2)≥0.7时,认为证据之间存在高冲突的情况。
于是,图1、2和3三种情形下的K值分别为0.760 5、0.652 0和0.933 4,即图1和图3描述的情况一和情况三经K值判断确实属于信息高度冲突的情况。另外,对于一般情况(图4),随着脉冲噪声浓度的增加,K值呈上升趋势,当噪声密度高达40%及以上时,冲突系数已经达到0.7左右(如图5),说明证据信息的冲突情况随着噪声密度的增加而变得严重,由冲突系数K来量化证据的冲突程度是有效的。对于被脉冲噪声污染严重的图像,为了解决证据信息之间的高冲突问题,本文利用冲突系数构建可信度加权模型来修正证据信息,以Sij=1-K(mi,mj)作为各个证据间的关联系数,构成关联矩阵SM:
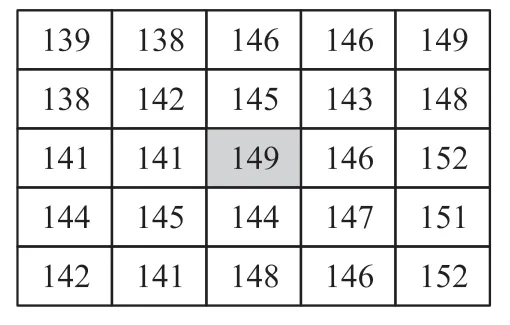
图4 一般情况
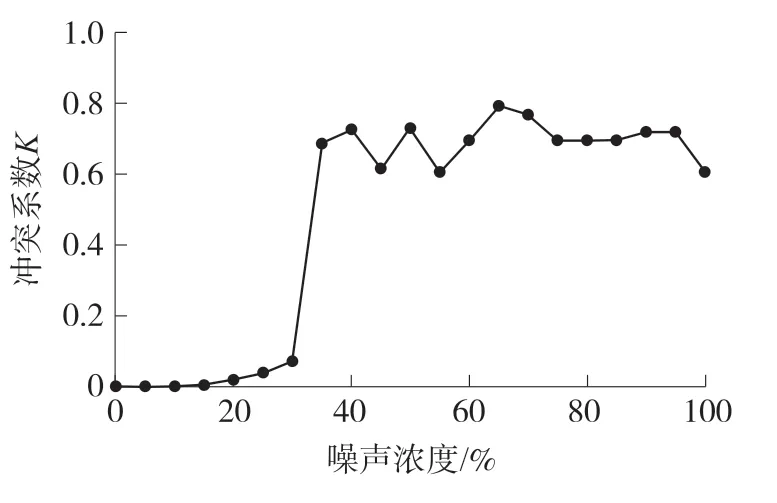
图5 冲突系数K随脉冲噪声浓度升高的变化趋势
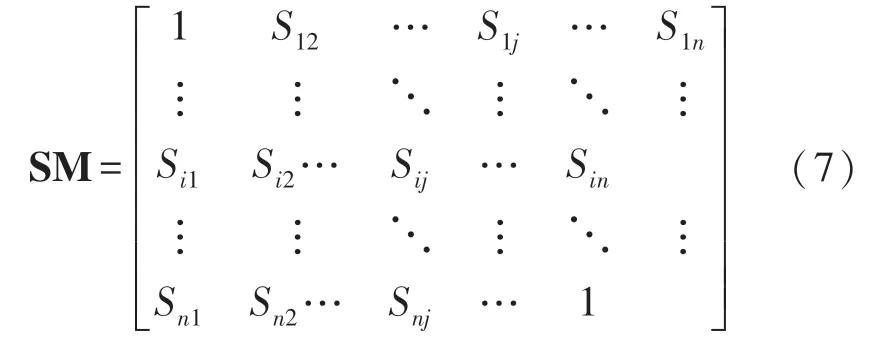
令
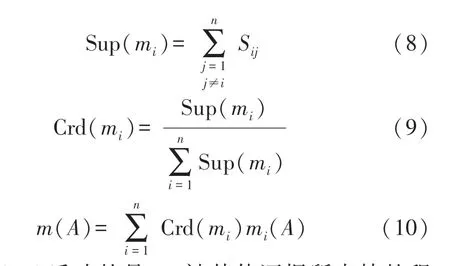
Sup(mi)反映的是mi被其他证据所支持的程度,两个证据之间的相似度越高,其互相支持的程度就越大。反之,相似度越低互相支持的程度也越低。将支持度进行归一化得到可信度Crd(mi),可信度反映了一个证据的可信程度,以此作为权重将证据信息进行修正,再由式(1)对修正后的信息进行进一步融合,最终使用Pignistic概率转换式(2)得到概率分布BetP。
对于上述三种情况中属于高冲突情形的图1和图3,经计算可以得到相应的关联系数为0.239 5和0.066 6。由式(7)-式(10)可以得到二者修复后的证据信息分别为:

总之对于给定图像,先确定证据信息m1和m2,判断冲突系数K值,若K<0.7,直接进行D-S证据理论信息融合,若K≥0.7,则信息修正后融合。融合后进行概率转换,得到BetP,当BetP>0.5时,视为噪声点。具体流程见图6。
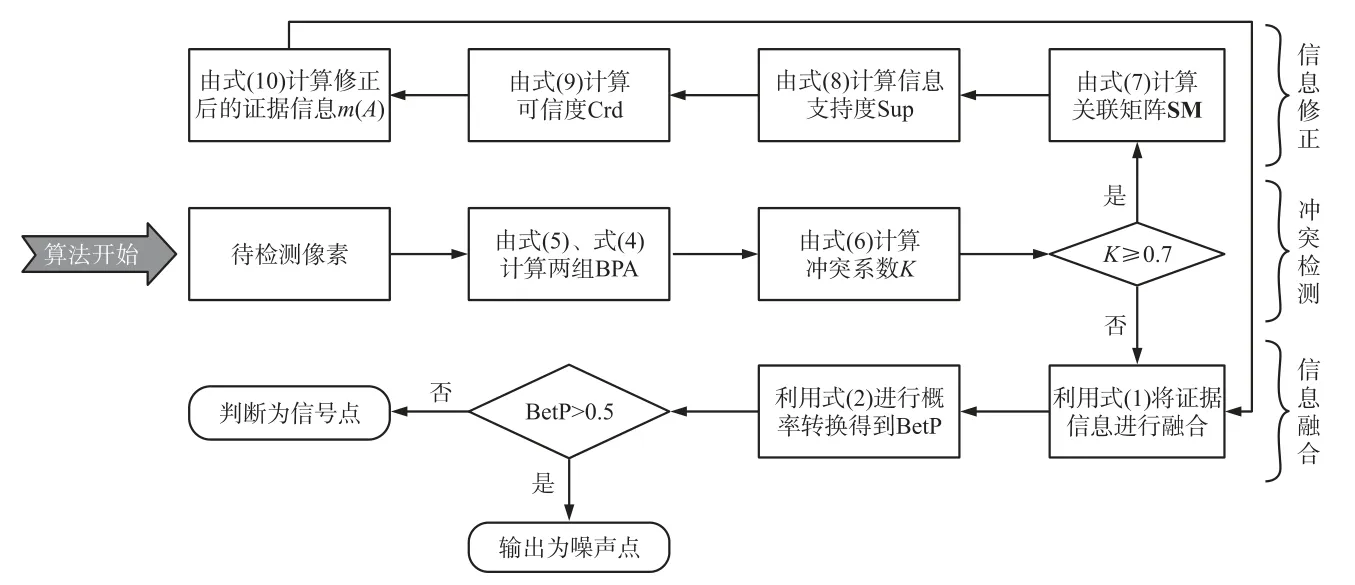
图6 D-S可信度加权模型流程图
针对图1到3这三种情况,表1给出ASMFDBER与本文方法的计算结果对比。对于情况一,ASMF-DBER算法检测后认为是信号点,事实上其噪声部分证据信息所得数值为0,判断失效,而本文方法得出m(N)=0.647 1,概率转换后BetP=0.677 7,大于0.5,成功检测为噪声点;对于情况二,两种方法均成功检测为噪声点,但本文方法所得的BetP更稳定,检测结果的确定性更高;对于情况三,本文方法成功检测为信号点,而ASMF-DBER方法错误地检测为噪声点,可见对于保留图像细节部分,本文方法更胜一筹。
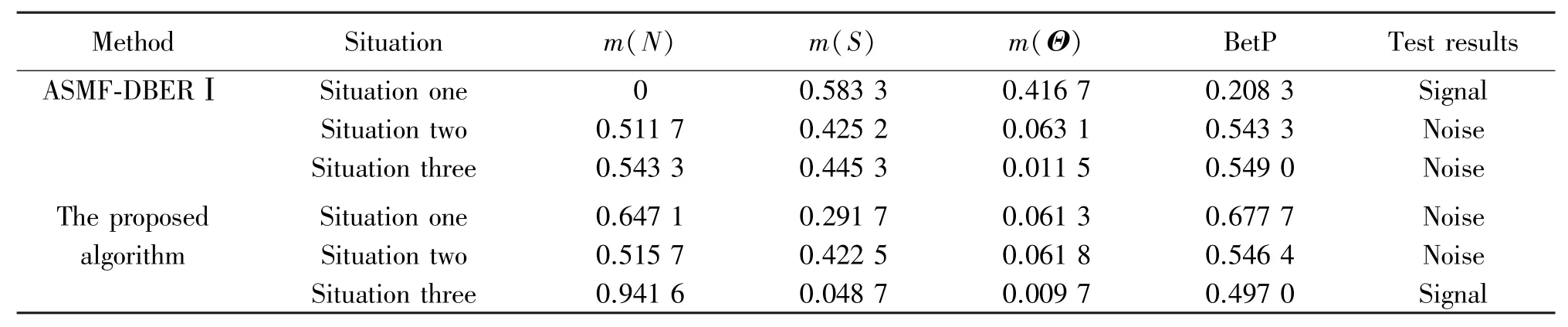
表1 3种情况下两种方法的融合结果和检测结果
3.2 噪声修复阶段
当图像被脉冲噪声污染严重时,很多中值滤波算法对当前判断为噪声的像素不加处理进行输出[4,20],导致图像恢复效果并不理想,本文对已判断为噪声的点在进行消噪时,考虑到未损坏像素与噪声像素的空间关系[21],利用当前像素和周围像素的空间距离和像素偏差,构造空间信息的偏移量来校正中值,给出更合理的消噪结果。步骤如下:
①对于噪声点先设定3×3的初始化窗口,根据噪声密度的强度自适应地调节窗口大小[10],窗口的最大值为Wmax,具体见图表2。

表2 滤波窗口的最大尺寸
若Num表示当前窗口内信号的数量,M为当前窗口大小,P为噪声浓度。当满足时Num<1/2×(1-P)×M时,修复窗口以中心像素为中心向外所有方向扩大一个单位,并且满足窗口大小不超过预设的最大值Wmax。
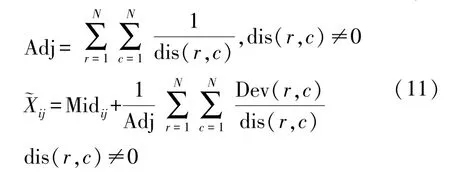
为当前窗口W内各个非噪声点与中心像素的空间距离,称为距离矩阵;

为修复窗口W内各个非噪声点的像素值与它们的中值Midij的偏差称为偏差矩阵。其中r和c为当前窗口内非噪声点的横、纵坐标,i和j为当前像素的横、纵坐标,Midij为当前窗口内非噪声像素强度的中值。由式(11)可见的,最后的输出值是在中值Midij基础上添加了一个校正量,校正量取决于当前窗口内非噪声点像素与当前像素的相关性大小,这样使得结果更接近图像的原始信息。
针对图1~图3这三种情况,由式(11)可计算得到校正系数Adj分别为4.298 9、4.298 9和3.360 6,修复值为151.494 6、187.192 6和15.112 7。
4 实验结果与分析
实验环境为:操作系统为Windows 10 x64,处理器为Intel(R)Core(TM)i5-8300H CPU@2.30 GHz 2.30 GHz,RAM为8 GB。语言环境为MATLAB R2019b 64-bit。
为了说明本文方法的有效性,文章使用了4幅测试图,分别是“Baboon”、“Pepper”、“Lena”和“Cameraman”。采用的对比算法有DBA、UTMF、NSBMF、BDND、ASMF-DBERⅠ和ASMF-DBERⅡ。
4.1 评价指标
为了评估噪声检测的有效性,本文选用错检率(Fdr)、漏检率(Mdr)以及正确率(Cdr)三个指标来进行,其具体计算方法如下:

式中:Fdsum是指信号点被错检为噪声的数量,Mdsum是被检测为信号点,但实际是噪声的像素的数量,Sum是图像中的像素数。
此外,也选择了常用的三个客观评价指标:峰值信噪比(PSNR)、图像增强因子(IEF)、结构相似性(SSIM)来对本文算法的性能进行综合评估,公式如下:
式中:M、N分别为图像的长和宽,Y为原始图像,X为被污染的噪声图,为去噪之后的图象,是~X的平均值,μy是Y的平均值,是的方差,是Y的方差,是和Y的协方差,c1、c2是是为了避免分母为零而设置的小正常数。
4.2 实验结果
表3给出了Lena图、Cameraman图在噪声浓度为70%和95%条件下,本文算法与其他算法的错检率(Fdr)、漏检率(Mdr)以及正确率(Cdr)的对比。通过数据,可以明显地看出DBA算法在70%浓度时表现不佳,但本文算法、BDND、ASMF-DBERⅠ和ASMF-DBEⅡ检测效果突出。当噪声浓度增高到95%时,ASMF-DBERⅠ和ASMF-DBERⅡ算法的检测结果明显下降,然而本文算法在解决高冲突问题上表现优异,检测效果稳定。
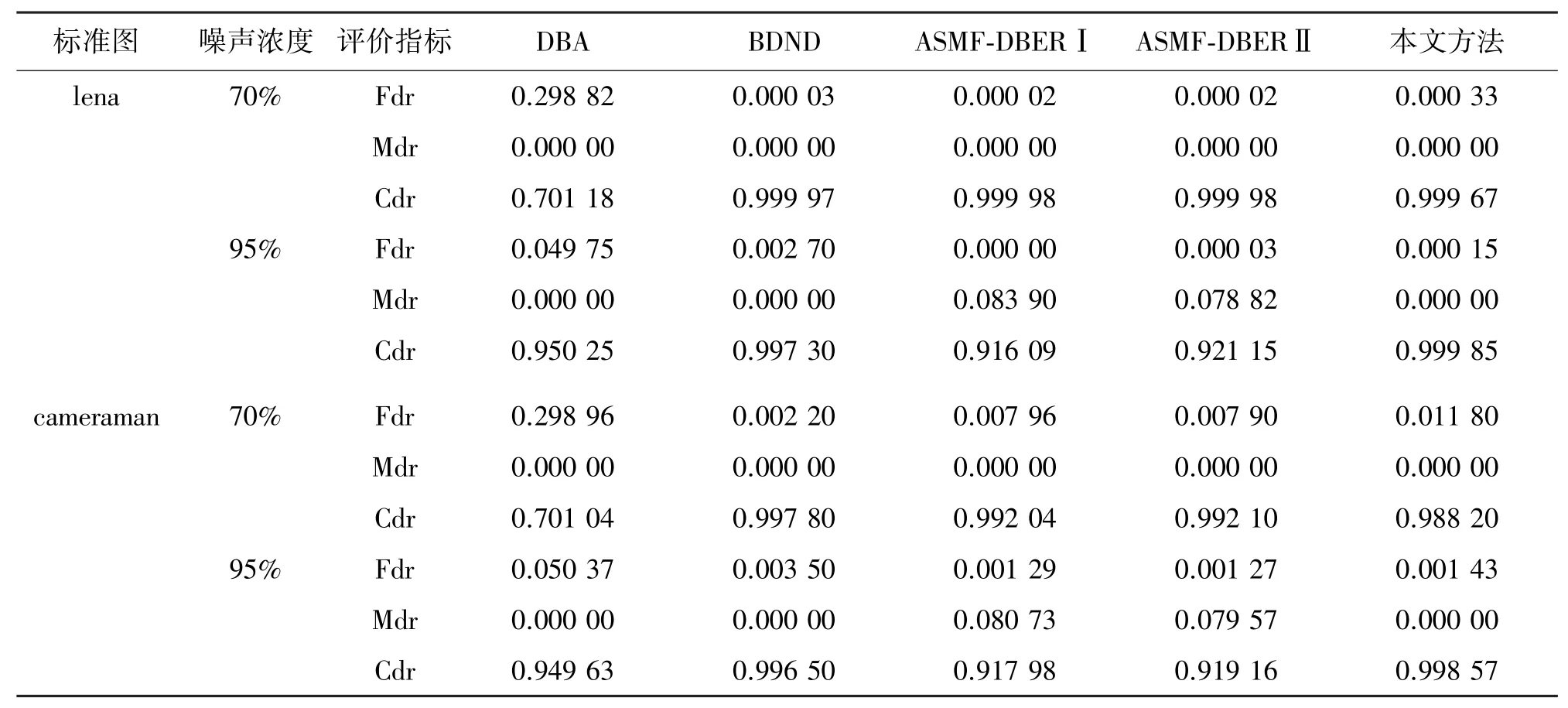
表3 lena图与cameraman图在70%和95%噪声条件下的Fdr、Mdr以及Cdr的对比 单位:%
图7表明在70%噪声密度下,DBA、UTMF和NSBMF算法还有明显噪声残留,而其他三种算法有着较好的修复效果。为了进一步说明本文算法的优势,在图7(a)中提取中心在第9行第13列位置的一个5×5子图像,其对应图7(b)的噪声子图像以及本文算法处理后的子图像均在图8中列出,具体数据计算结果见表4。该子图共有25个像素点,加噪后噪声点为15个,冲突系数显示有10个属于高冲突的噪声点,经概率转换,15个噪声点均被有效识别和有效校正。本文提出的方法对噪声和信号点的识别准确率较高,为降噪后保留图像的边缘及细节信息提供很好的保证。当噪声密度增加到90%(见图9),各算法的滤波效果均有所下降,ASMF-DBERⅠ和ASMF-DBERⅡ由于在噪声检测阶段有大量噪点未被识别,导致滤波后仍出现大量噪声点(图9(f)和图9(g)已圈出),而本文算法的检测效果表现出色,滤波后细节信息得到有效恢复。

图9 Lena图在噪声密度为90%下各算法的修复情况
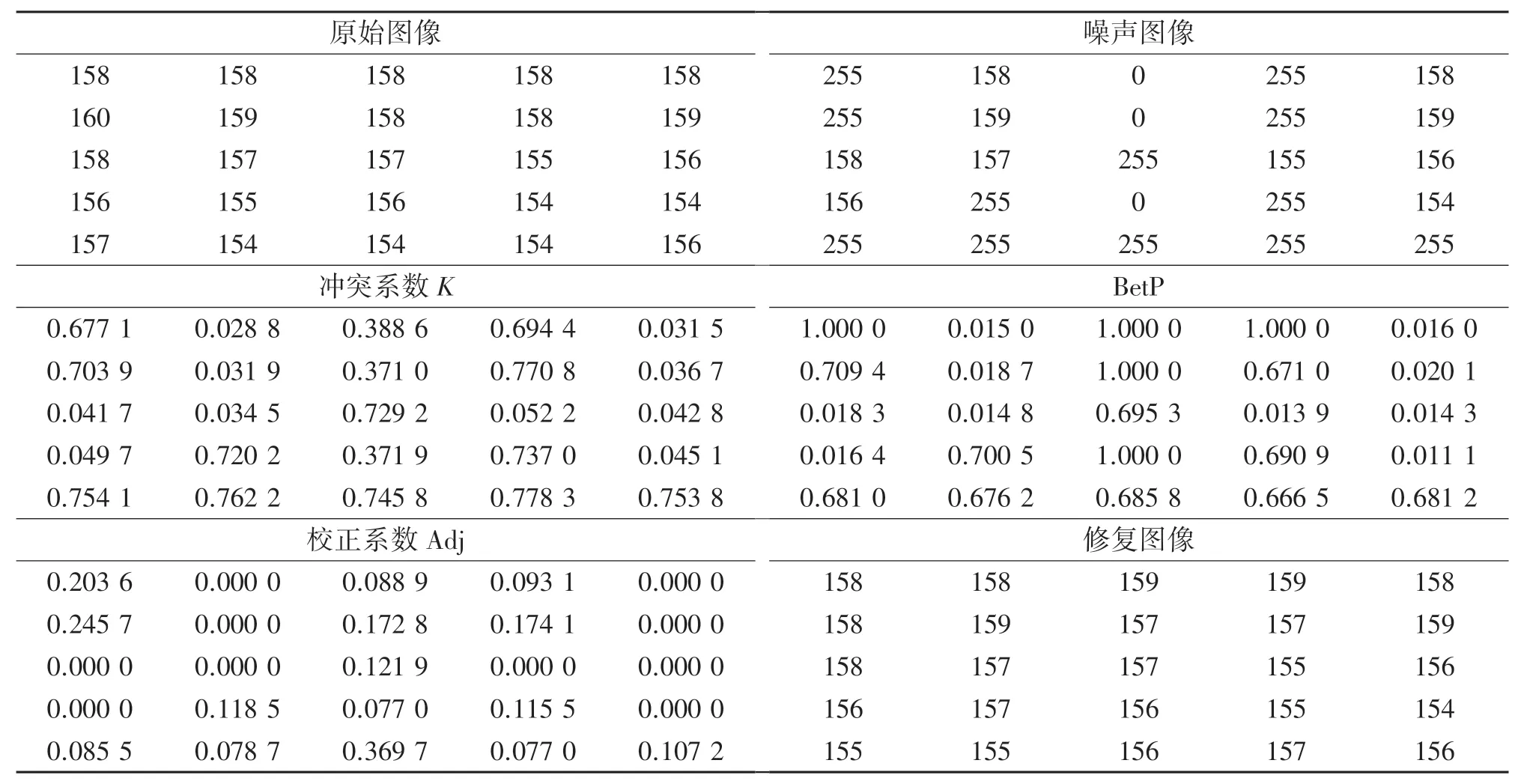
表4 Cameraman图中心位置在第9行第13列处的5x5子图像算例

图7 Cameraman图在噪声密度70%下各算法的修复情况
图8 噪声密度70%的Cameraman图经本文算法修复后的局部放大
从图10可以看出随着噪声密度的增加各算法的PSNR值均下降,而本文算法明显好于其他算法,尤其是在噪声密度达到90%及以上时,本文算法的优势更加明显。图11为四幅标准图在噪声密度为95%条件下的指标IEF和SSIM的多面板柱状图对比,可以清晰地看到,本文方法在这四幅测试图中表现稳定,无论是图像增强因子IEF,还是结构相似性SSIM,本文算法较对比算法有着明显的优势。说明在高密度噪声条件下,本文算法具备处理高冲突信息的能力,在噪声和信号的决策中,有着更为理想的表现力。
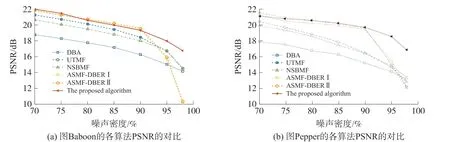
图10 各算法PSNR的对比
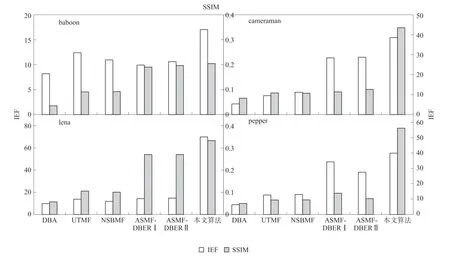
图11 四幅测试图在噪声比为95%条件下的定量指标IEF和SSIM的对比
5 结论
本文在证据理论的基础上给出了图像脉冲噪声检测的新方法,为解决证据理论在噪声检测阶段出现的高冲突问题,本文使用冲突系数来描述冲突程度,并利用可信度加权平均的方法进行修正证据,利用证据理论的融合规则完成最后的噪声检测。实验表明,本文提出的方法即使在高密度噪声条件下检测噪声的结果也明显占优,并且能够表现出良好的稳定性。为利用证据理论检测图像噪声提供了新思路,值得进一步探讨和研究。
猜你喜欢
小哥白尼(军事科学)(2022年2期)2022-05-25
合肥工业大学学报(自然科学版)(2021年11期)2021-12-10
有色设备(2021年4期)2021-03-16
现代电子技术(2021年1期)2021-01-17
红领巾·萌芽(2019年8期)2019-08-27
微型电脑应用(2019年1期)2019-01-23
电脑知识与技术(2018年35期)2018-02-27
中成药(2017年12期)2018-01-19
CHIP新电脑(2016年3期)2016-03-10
弹箭与制导学报(2015年1期)2015-03-11