基于极值搜索的输电通道无人机电机自抗扰控制
2022-08-18 10:23:56李燕雷张晓阳李晓令刘伟王刚周高伟
电气传动 2022年16期
李燕雷,张晓阳,李晓令,刘伟,王刚 ,周高伟
(1.国家电网有限公司,北京 100031;2.河北电力工程监理有限公司,河北石家庄 050021;3.国网河北省电力有限公司,河北 石家庄 050000;4.北京洛斯达科技发展有限公司,北京 100088)
无人机具有成本低廉、设计简单和体积小等优点,得到了相关研究机构的广泛关注[1]。无人机通过电机为飞行提供动力,无人机的悬停和垂直起降由电机带动旋翼高速旋转得以实现。无人机的偏航、滚转和俯仰运动通过对电机的转速进行协调控制,使旋翼产生运动方向的力矩来实现飞行[2]。无人机的飞行性能由姿态控制的速度和稳定性决定,虽然无人机的飞行器结构较为简单,但却难以控制,其姿态的控制难度较大[3]。因此,在输电通道障碍物排查过程中所用无人机电机自抗扰控制进行研究具有重要意义。
为提高无人机飞行过程中的抗干扰能力,学者对此展开了深入研究。文献[4]提出了一种抗风扰法的四旋翼无人机线性自抗扰控制(linear active disturbance rejection control,LADRC)方法,对无人机的姿态模型进行分析,根据分析结果建立模拟侧风模型,并设计了二阶LADRC闭环控制回路,在反馈控制律的基础上实现无人机电机的自抗扰控制。结果表明,该方法虽然可以在干扰条件下实现对无人机电机的控制,但是由于没有对姿态数据进行归一化处理,增加了控制所需时间,存在控制效率不高的问题。文献[5]提出了一种自适应滑模控制器以实现对无人机电机的自抗扰控制。该方法在内外环控制结构的基础上根据模型的外界干扰和模型不确定的情况设计无人机电机自抗扰控制器,在外环中实现无人机轨迹跟踪,获得期望的姿态角和升力,实现无人机电机的自抗干扰控制。结果表明,该方法控制效率高于一般方法,但是由于没有获取无人机在运动状态下的姿态信息,得到的控制结果稳定性不高。文献[6]提出了基于小波神经网络的无人机电机控制方法,采用梯度下降算法优化训练后的网络,分析电机的电压和转子角度之间的非线性关系,最后通过小波神经网络实现对无人机电机的控制。结果表明,该方法能够有效控制电机换相,但是存在控制结果稳定性不佳的问题。
为解决上述方法中存在的问题,本文提出一种基于极值搜索的输电通道无人机电机自抗扰控制方法。通过扩张状态观测器获取无人机系统的运行状态信息,对无人机姿态信息进行采集,采用极值搜索实现对输电通道无人机电机的自抗扰控制,通过四元数解算无人机姿态,并通过磁力计数据和加速度计数据获得高精度的姿态信息。在极值搜索寻优原理的基础上修改方向和步长的惯性项,运用梯度下降法对惯性项进行修正,从而实现输电通道搜索的无人机电机自抗扰控制。
1 无人机姿态信息获取
1.1 无人机姿态控制难点分析
对无人机姿态进行控制时主要面临着以下几点问题:
1)无人机的偏航运动、滚转运动和俯仰运动存在耦合性。因此,在采用特定姿态对输电线路通道进行障碍物排查时,需要对飞行姿态产生的影响进行考虑,这种影响在无人机做机动性高的动作时较为明显,因此,设计控制器时需要重视。
2)电机转速与控制信号之间存在非线性关系,旋翼产生的拉力与电机转速之间也是非线性关系,这种关系会影响无人机的控制性能。
3)气动力矩和陀螺力矩会对无人机的正常飞行产生影响,气流等环境因素也会产生干扰,增加了系统的不确定性。
针对上述问题,需要设计并研究具有较强鲁棒性和抗干扰性的状态观测器,以获取可靠的无人机姿态信息。
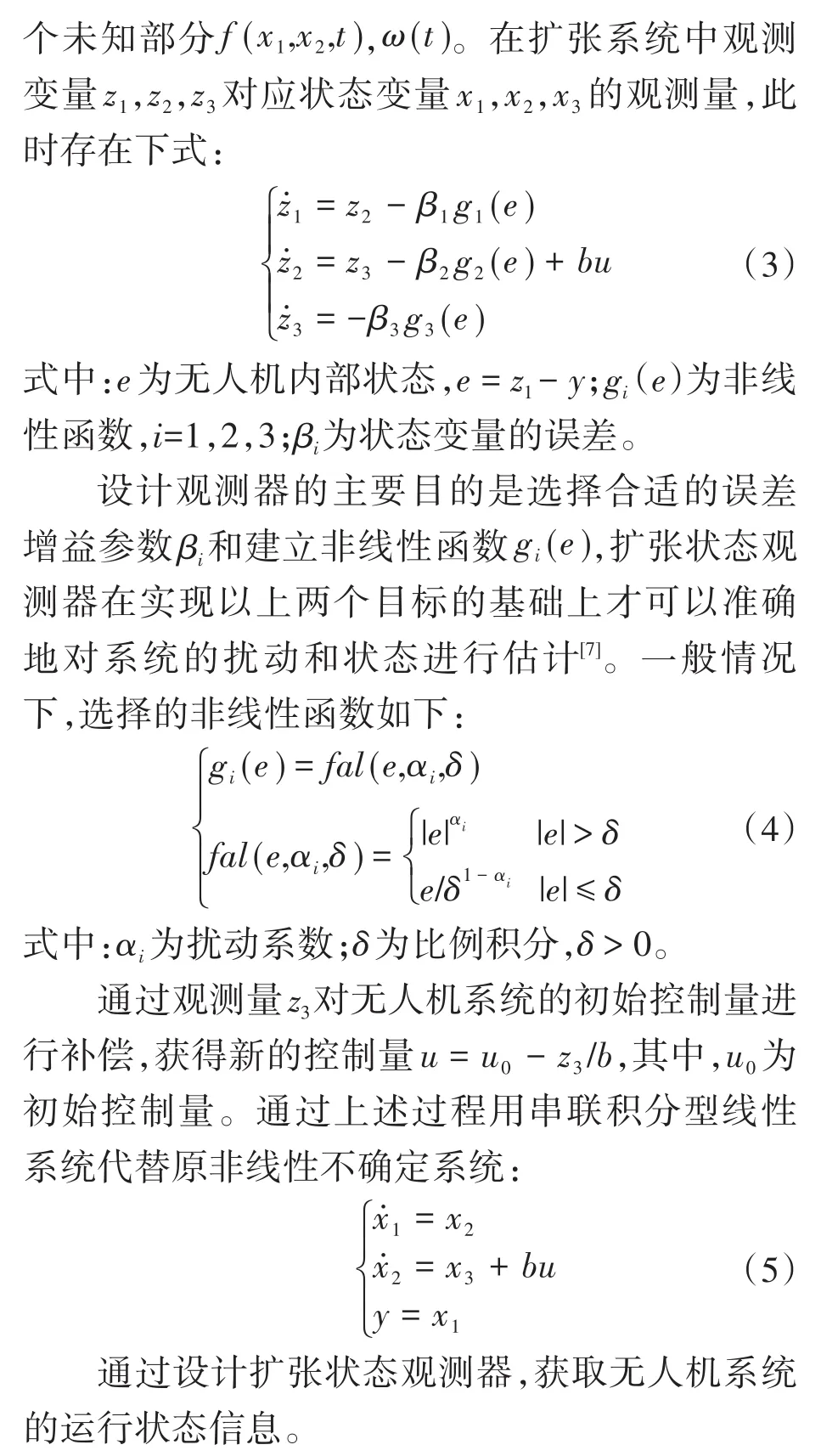
1.2 扩张状态观测器设计

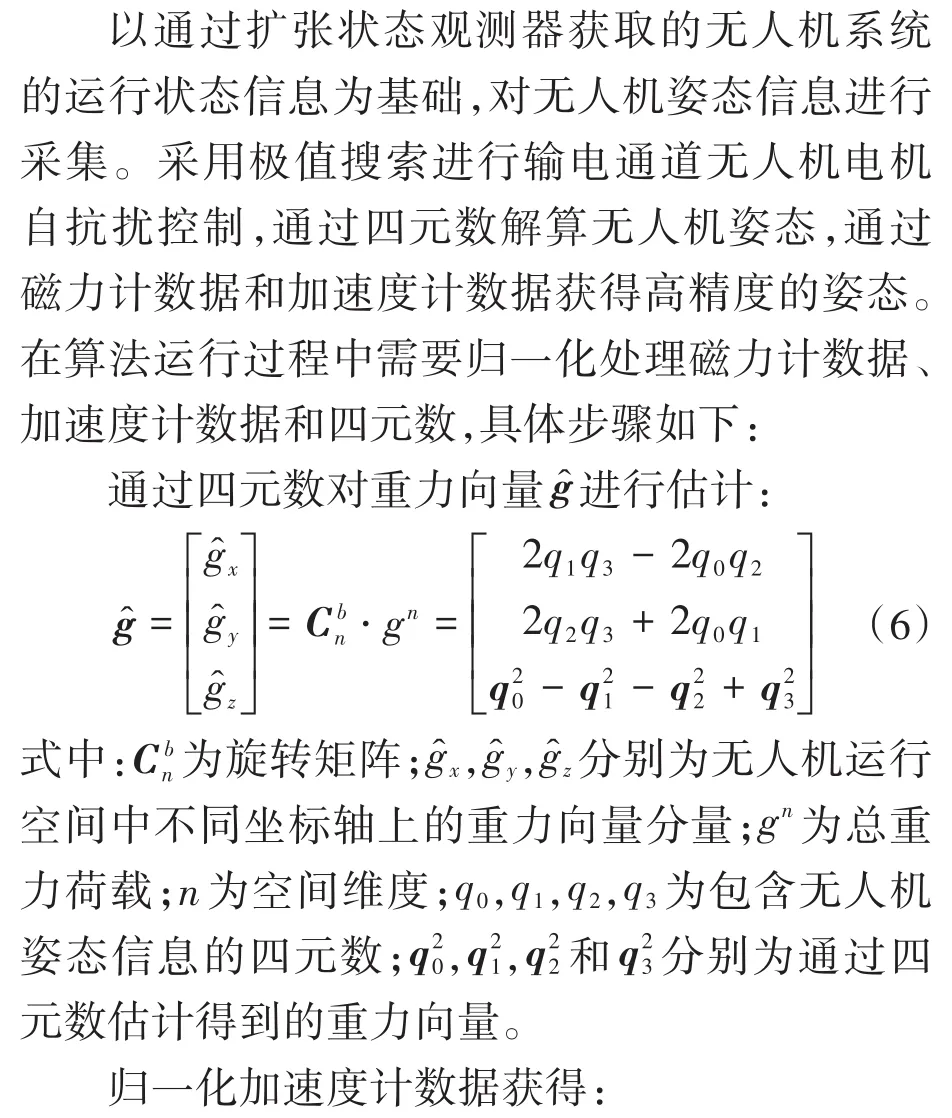
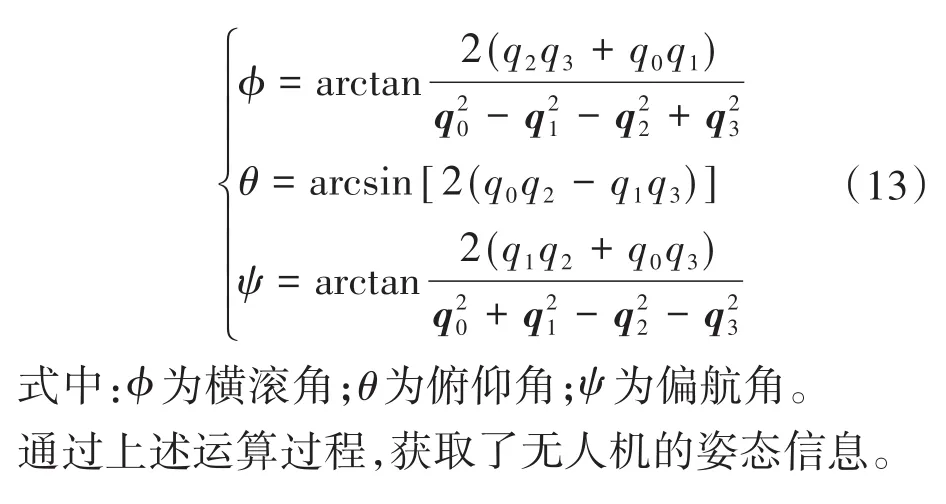
1.3 姿态信息采集

2 输电通道无人机电机自抗扰控制
以获取的无人机姿态信息为基础,采用极值搜索实现对输电通道无人机电机的自抗扰控制。在极值搜索寻优原理的基础上修改方向和步长的惯性项,以此来避免搜索过程中算法可能出现的不收敛或收敛速度慢的问题,并将其应用在输电通道无人机电机自抗扰控制关键参数的设置过程中,获得需要控制的自抗扰控制参数,实现输电通道无人机电机自抗扰控制。图1为输电通道无人机电机自抗扰控制结构框图。
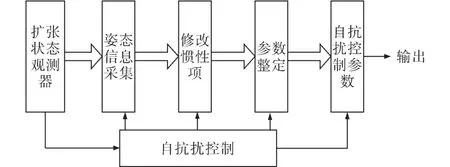
图1 输电通道无人机电机自抗扰控制结构框图Fig.1 Block diagram of active disturbance rejection control structure of UAV motor for transmission channel


3 实验分析
为了验证基于极值搜索的输电通道障碍物排查用无人机电机自抗扰控制方法的整体有效性,对其进行实验测试,本次测试所用的软件为Arduino。分别采用基于极值搜索的输电通道无人机电机自抗扰控制的本文方法、文献[4]中基于风扰下四旋翼无人机LADRC控制方法和文献[5]中基于自适应滑模控制器的无人机电机自抗扰控制方法进行测试,对比不同方法实现控制后无人机的横滚角、俯仰角、偏航角的稳定曲线。
实验以型号为MD4-1000的长航时四旋翼无人机为实验对象,图2为无人机示意图,长航时四旋翼无人机参数为:升速率7.5 m/s,最大速度15 m/s,任务载荷800~2 000 g,机身自重2 650 g。

图2 长航时四旋翼无人机Fig.2 Long-endurance four-rotor UAV
根据上述参数,对不同方法的控制性能进行对比,图3为不同方法对无人机横滚角、俯仰角、偏航角控制稳定性的对比结果。
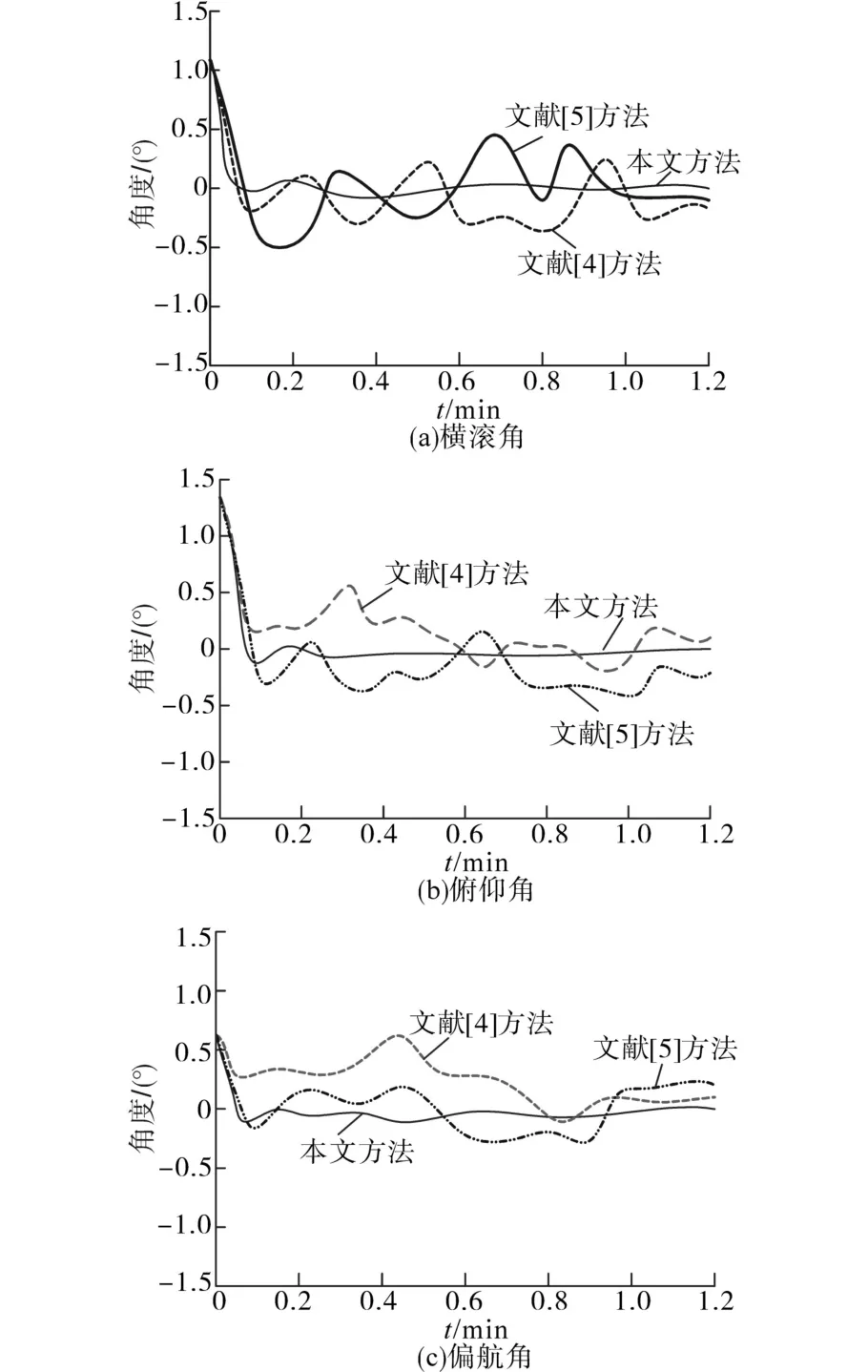
图3 控制稳定弼对比Fig.3 Comparison of control stability
分析图3可知,在姿态控制稳定测试的过程中,本文方法在横滚角、俯仰角、偏航角对无人机的控制稳定性均高于文献[4]方法和文献[5]方法。这是由于本文方法通过状态观测器可以根据被控对象的输入和输出确定无人机内部的状态信息,根据获取的状态信息实现无人机电机的自抗扰控制,从而提高了无人机控制的稳定性。
以控制时间为实验指标,分别采用本文方法、文献[4]方法和文献[5]方法对无人机电机进行自抗扰控制测试,对比不同方法所用的控制时间,测试结果如图4所示。
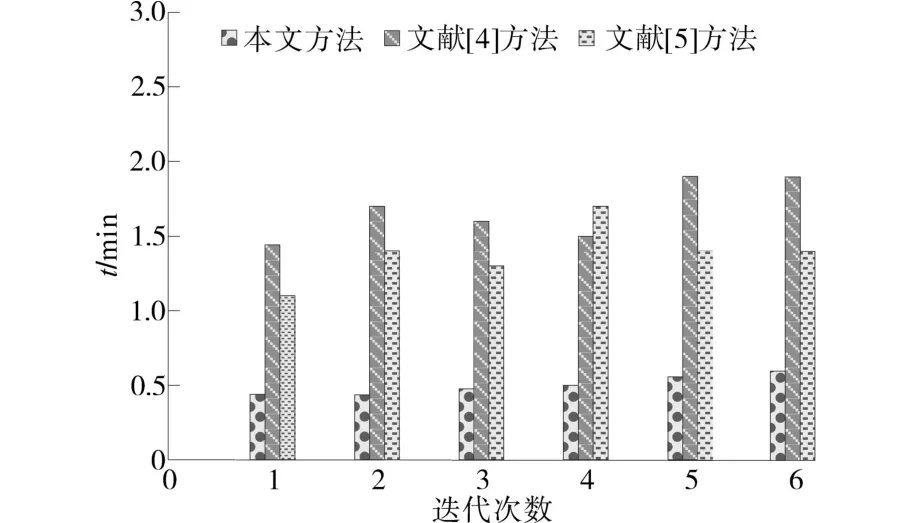
图4 控制时间测试结果Fig.4 Control time test results
根据图4中的数据可知,本文方法控制输电通道无人机电机所用的时间在多次迭代中远远低于文献[4]和文献[5]控制无人机电机所用的时间,本文方法的控制时间始终低于1 min,最短时间仅需要0.4 min,最长时间也仅需要0.6 min,而传统方法的控制时间最大值达到了1.9 min。这是由于本文方法在算法运行过程中对扩展状态感测器获取的数据进行了归一化处理,可在较短的时间内获取无人机的姿态信息,缩短了控制时间,进而提高了控制效率。
为了进一步验证本文方法的有效性,以抗干扰性为实验指标,对比不同方法的控制效果,结果如图5所示。
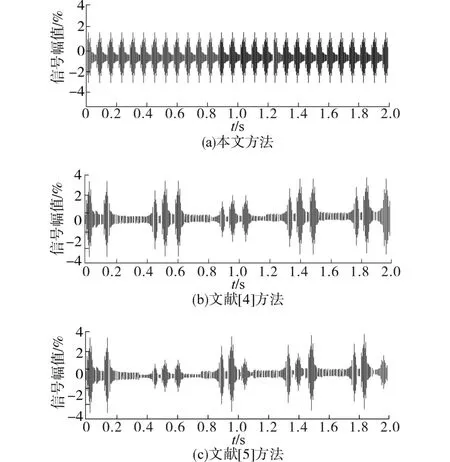
图5 抗干扰测试结果Fig.5 Anti-jamming test results
分析图5可知,本文方法下无人机电机运行时的信号波形图呈现出规律性的变化特点,信号较为稳定,表明本文方法的抗干扰效果较好。而对比之下,文献[4]和文献[5]方法的信号波形图没有呈现出一定的变化规律,并且信号波动较大。由此可知,本文方法可以有效抑制多种因素的干扰,具有更强的抗干扰效果。
4 结论
无人机飞行控制技术和机载设备在近年来得到了飞速的发展,被广泛地应用在民用领域和军事领域中,无人机在飞行过程中易受到外界的干扰,在上述背景下研究输电通道障碍物排查用无人机电机自抗扰控制方法具有重要意义。目前,无人机电机自抗扰方法存在控制稳定性差和控制效率不高等问题,为此本文提出基于极值搜索的输电通道无人机电机自抗扰控制方法,该方法可在较短的时间内有效地实现自抗扰控制,并且控制的稳定性高,抗干扰能力强,解决了目前方法中存在的问题,为无人机技术的发展奠定了基础。
猜你喜欢
新世纪智能(数学备考)(2021年10期)2021-12-21 06:20:38
北京航空航天大学学报(2021年9期)2021-11-02 08:24:16
军民两用技术与产品(2021年9期)2021-03-09 05:45:28
河北理科教学研究(2020年3期)2021-01-04 01:49:40
学生天地(2020年3期)2020-08-25 09:04:16
电子制作(2019年9期)2019-05-30 09:41:48
中学数学杂志(2019年1期)2019-04-03 00:35:46
汽车观察(2018年9期)2018-10-23 05:46:40
中国自行车(2018年8期)2018-09-26 06:53:44
北京航空航天大学学报(2016年8期)2016-11-16 01:51:09