
线损业务场景仿真及故障定位系统的设计与实现
2022-08-17 03:59:32陈瑜赵寅生党婷婷罗义钊程树英柳玉銮
微型电脑应用 2022年7期
陈瑜, 赵寅生, 党婷婷, 罗义钊, 程树英, 柳玉銮
(1.国网山西省电力公司,大同供电公司, 山西,大同 037006;2.大同大学,物理与电子科学学院,山西,大同 037009;3.福建网能科技开发有限责任公司, 福建,福州 350003)
0 引言
输电线路受覆盖范围大、传输距离远、区域地形复杂、设备老化、恶劣天气等因素的影响很容易出现故障,而且瞬间故障又占比非常大,给故障的定位与排查造成了极大困难。但快速准确的故障定位在日常维护中具有极大的现实意义,既能缩短修复的时间,又可以提升供电质量,是降本增效的基础。而通过线损统计分析计算也可获取线损趋势,为降损提供数据支持。
1 总体分析
1.1 线路故障研究现状
目前行业内常采用的线路故障定位方法根据信号来源可以分为单端定位法和双端定位法,区别在于行波信号来源于线路的两端还是一端。根据原理进行划分,主要包括以下三类。
(1) 阻抗法:故障发生时,单端供电系统中母线测量断会得到故障发生点的阻抗值,与线路自身的单位阻抗相除即可获得测量点到故障点之间的距离,可以分为单端阻抗、双端阻抗。
(2) 行波法:故障发生时,故障点与地之间等同于多了个电源,会向线路两端发出行波,行波包含了相关故障信息。可以分为单端A型测距、双端D型测距[1]。
(3) 故障分析:故障发生时,在测量点获取电压值及电流值,通过计算获取故障点位置。
1.2 行波定位原理
行波是指电流或电压波在线路上随时间传播的波,但线路上不是正向行波与反向行波一直同时存在,有只包含正向行波的情况。电力系统正常运行时,节点电压为相电压,一旦发生故障,电压为0,可以当做在故障节点增加了一个与原相电压反方向的电压源,行波以此电压源作为行波源向两端传播,进而得到故障波形。
1.3 系统需求概述
线损计算系统首先要根据供电企业的理论线损计算的现状提炼相关的需求,整体架构通常由采集终端、通讯协议、主站以及智能电表构成。采集终端用来实时监测并采集相关信息,与主站实时通信。通讯协议是主站与各个终端的桥梁,支持各类标准的通讯协议,实现数据传输。主站的功能需求需要包括基础信息管理、各类线损指标考核管控、故障定位、线损多维度分析与展示以及账户权限管理,其中故障定位即可通过行波测距算法实现。
1.4 系统设计原则
系统设计功能包含线损管理的各个方面,为了确保设计的系统平稳运行且定位可靠,在设计过程中应遵从以下原则:
(1) 标准化:系统所用的各类通讯协议、网络协议、操作系统、中间件需满足行业内标准。
(2) 模块化:体系架构采用多层模块化体系,相对独立,提升系统兼容性。
(3) 可扩展:为便于系统功能拓展以及新增功能接入,系统架构设计需要具备可扩展性,尽量避免二次开发。
(4) 实用性:功能易用、结果准确是线损及故障定位系统必须具备的特性,直接关乎软件的最终质量。
(5) 安全性:需确保网络安全、数据安全。
2 行波测距算法
2.1 单端A型测距
单端A型测距法利用行波从故障点到测量点的传播时间来进行计算,行波到达测量点时会发生折反射,到达故障点会再次发生折反射,设第一次到达测量点时间为Ts1,第二次到达测量点的时间为Ts2,这个时间差即为一个来回所需的时间,根据行波的传播速度v就可以计算出故障点距测量点的距离Xs=12vΔt=12v(Ts2-Ts1)。
2.2 双端D型测距
双端D型测距是利用行波到达两端测量点的时间来进行计算,设到达一端S的时间为Ts,达到另一端R的时间为Tr,线路总长L,波速v,则故障点距离测量点S与R的距离为
Xs=[(Ts-Tr)v+L]/2
Xr=[(Tr-Ts)v+L]/2
2.3 对比分析
2.3.1 单端A型测距法优缺点
(1) 优点:成本低,不需要两端数据同步的通信设备,更实用。
(2) 缺点:系统线路通常都会比较多,单端线路数量较少,而且由于线路交错,经过连接点时也会发生折反射,导致行波会有所衰减,波头到达时间难以准确获取。
2.3.2 双端D型测距法优缺点
(1) 优点:结果更精确,两端都是测量第一次到达的行波即可,不受折反射影响,更容易识别且计算相对简单。
(2) 缺点:成本稍高一些,对数据同步设备有所依赖,时间误差会导致测得的距离误差。
综上所述并结合线损故障定位系统的实际需求,本文采用双端D型测距法。
3 故障定位仿真研究
本文采用PSCAD/EMTDC软件进行故障仿真,它交互界面友好,操作简单,结果显示直观,通过仿真获取相关故障的电流、电压特征,为后续线损故障定位系统奠定分析基础[2]。
3.1 工频故障仿真
3.1.1 单相接地短路故障
单相接地短路是电网系统中最经常发生的故障,大约占故障总数的百分之八十。设故障发生时长0.2秒,持续0.2秒,整体仿真时间0.5秒,时间步长50微秒。经过仿真可得零序电流幅值为0.183191,与正常情况的零序电流相比,这个幅值较大。因此如果A相电流增大、电压下降,B相和C相电流和电压无变化,出现零序电流即可认为出现了A相接地短路。
3.1.2 两相相间故障
两相相间故障一般是两相之间直接连接导致的,本文采用A、B相短路来仿真,假设值与单相相同,可以得到零序电流幅值基本小到可忽略。因此如果A、B相电压下降、电流增大且反向,C相电流电压均无变化,而且没有出现零序电流,即可认为是A、B相相间短路故障。
3.1.3 两相接地故障
两相接地故障是指两相连接并接地导致的故障,本文采用A、B相接地进行仿真分析,假设参数同上,可发现出现了零序电流。因此如果A、B相电压下降、电流增大且反向,C相电流电压无变化,但出现了零序电流,即可认为是A、B相两相接地故障[3]。
3.1.4 三相短路故障
三相短路故障是指三相相连导致短路,假设参数同上,可发现未产生零序电流。因此如果三相电流增大、电压下降,未出现零序电流,即可认为出现三相短路故障。
3.2 雷击故障仿真
电力系统中,雷击导致的线路故障占比也非常高,快速定位雷击故障点也可以大幅降低工人的工作强度,节约抢修时间。
3.2.1 雷电绕击
雷电绕机是指雷电绕过避雷线直接击打到输电线路导致的故障,本文采用多波阻抗模型假设雷电击在A相线路进行仿真,将杆塔分为多个部分进行仿真,获取波阻抗。仿真时间0.000 9 s,雷电流接通0.000 6 s,根据仿真结果,A相电流和电压会骤增,B相、C相电压也会增大,但电流无变化,且A相增幅远远大于其他两相。
3.2.2 雷电反击
雷电反击是指击打在杆塔或避雷线导致的故障。假设仿真参数同上,根据仿真结果,闪络相波形会出现正负峰值,负向远大于正向,其他两相只能得到正向峰值,并且三相感应到的正向电流峰值的一样的。
4 系统详细设计
4.1 性能要求
(1) 用户访问时,页面响应速度小于2 s。
(2) 支持多用户(至少200人)并发访问。
(3) 系统故障时解决时间不超过24小时。
(4) 具备数据备份、数据恢复预案。
(5) 确保可长期稳定不间断运行。
4.2 整体结构
线损业务场景仿真及故障定位系统主要是通过采集终端进行实时状态监控以及数据采集,利用标准通讯协议进行数据传输,将相关数据保存以便后续线损分析与故障定位,最终将分析结果进行直观的可视化展示。系统整体结构如图1所示。

图1 系统整体结构图
4.3 功能模块
线损仿真及故障定位系统功能模块构成如图2所示。
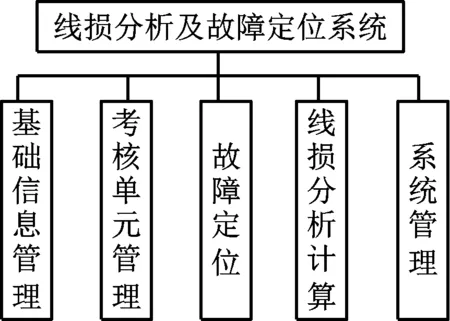
图2 系统功能模块组成
(1) 基础信息管理:包括线损计算相关的变电站、台区、线路相关资料的编辑与查询。
(2) 考核单元管理:包括线损指标管理、对单一输电线路的基础考核单元、对无法清晰区分有关联关系的线路进行组合考核单元。
(3) 故障定位:包括参数动态采集、动态数据收发、定位算法分析等[4]。
(4) 线损分析计算:包括供电企业综合统计、累计值统计、按时间、区域等维度的分析,故障原因统计、线损趋势、超出设定阈值的线路查询、异常台区归类等。
(5) 系统管理:用户账密及权限管理。
4.4 定位算法参数
系统最核心的功能是故障定位,相关参数的取值都会影响最终定位结果的精确程度,对各类参数设计如下。
(1) 三相电源:220 kV,50 Hz
(2) 波头检测:本文采用双端D型测距法,关键是对行波波头进行识别,如果未识别或识别有误,都会影响最终测距结果,采用小波分析,将PSACD获取的数据导入MATLAB即可对波形进行解析,得到波头到达时间。
(3) 波速选择:行波在输电电路上的传播速度也是测距的关键参数,受土壤电阻率以及线路分布参数都会产生影响,比较合适的是将不同地区的各类参数带入计算波速或采用实际测量数据,不建议直接取光速300 000 km/s。
(4) 故障盲区:指的是发生区间故障很难被监测到,行波非常微小,此时可将双端测距与常规的其他方法结合使用,尽量弥补误差。
(5) 线路总长:实际场景中,线路总长的计算会存在误差,杆塔之间的输电线会有一定弧度,并非完全的直线,这种情况只能通过实地测量进行补充[5-6]。
4.5 故障定位流程
系统输入界面录入相关参数后,根据前文介绍的测距算法及波形仿真分析办法,实现故障定位解析的流程如图3所示。

图3 故障定位流程图
4.6 核心数据库表设计
系统要实现线损分析及故障定位功能,需要采集的基础元数据涉及供电企业、用户、采集点、采集勘察信息以及故障信息,核心数据库表设计如下。
(1) 供电企业表:主要字段包括编号、名称、上级单位名称、类别、排序序号等。
(2) 用户信息表:主要字段包括人员编号、所属部门、姓名、职位、工种、技术等级、联系方式、服务等级、持证标识、定编标识、在岗状态等。
(3) 线损采集点表:主要字段包括采集点编号、名称、状态、地址、GPS经纬度等。
(4) 线损采集信息表:主要字段包括采集点编号、终端安装位置、通讯方式、通信上行场强、通信下行场强、安装位置图、走线位置图、勘察人员等。
(5) 线损故障信息表:缺陷标识、采集点编号、故障上报人员、故障发生时间、填报时间、故障现象描述等[7]。
5 测试与验证
为验证本文设计系统与定位方法的准确性与实用性,在国内某省市两级公司进行了搭建与部署,连续三个月不间断运行,可承接500人同时访问,页面平均响应速度为1.6 s。以雷击故障为例,对反击故障、绕机未闪络、绕机闪络故障进行仿真,设监测点间距35 km,采样频率10 MHz,代入本文设计的系统之中,计算行波抵达监测点的时间,故障定位结果如表1所示。
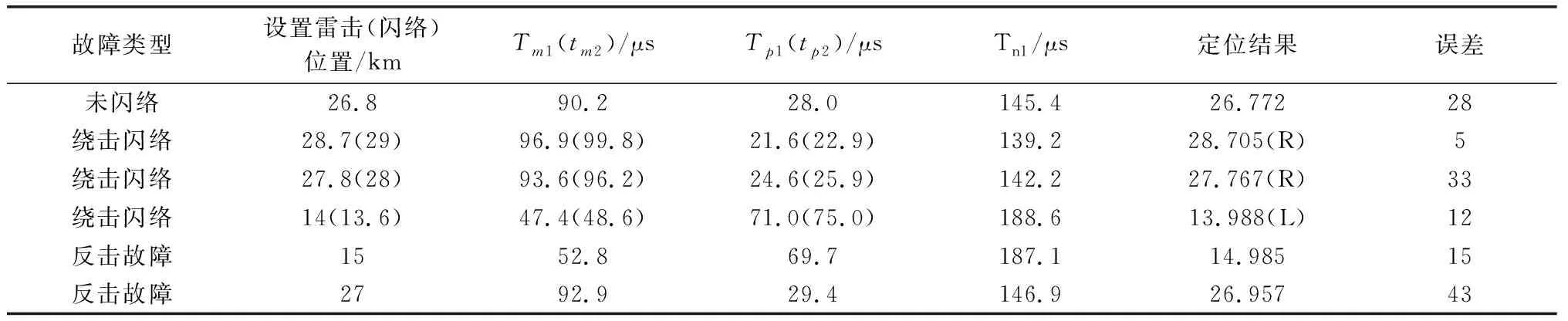
表1 雷击故障定位结果表
其中,R代表雷击点右侧发生闪络,L代表雷击点左侧发生闪络,由定位结果表可知,通过本文设计的模型对各类雷击故障进行定位,误差最大为43 m,具有较好的定位效果[8-9]。
6 总结
本文对工频故障及雷击故障进行了仿真分析,并基于双端D性测距方法设计了线损仿真及故障定位系统,实现了线损分析计算与故障点位置的测距,但在实测波形精准度、测距方法优化以及噪声数据剔除方面还有待改进,如果可以综合考虑地形、天气等影响因素,引进传感器技术增加数据来源,最终定位误差会更小。
猜你喜欢
数学物理学报(2022年5期)2022-10-09 08:57:42
航空学报(2022年5期)2022-07-04 02:24:32
模具制造(2019年10期)2020-01-06 09:13:08
自动化与仪表(2019年2期)2019-03-06 08:24:26
数字通信世界(2019年1期)2019-02-14 02:00:38
成都信息工程大学学报(2018年1期)2018-05-31 08:40:38
山东工业技术(2016年15期)2016-12-01 05:31:19
核科学与工程(2015年2期)2015-09-26 11:57:14
天津师范大学学报(自然科学版)(2015年2期)2015-03-11 18:46:50
湖州师范学院学报(2015年4期)2015-03-11 16:39:43
