
基于数字孪生的隧道智能巡检技术研究与应用
2022-08-17 08:15梁亚成虞赛君马迪迪刘文虎董叔壮
北京测绘 2022年7期
梁亚成 虞赛君 马迪迪 刘 永 刘文虎 董叔壮
(1. 合肥市轨道交通集团有限公司 安徽 合肥, 230000;2. 合肥市轨道交通集团有限公司运营分公司 安徽 合肥,230000;3. 合肥市轨道交通研究院, 安徽 合肥, 230000)
1 背景
地铁隧道在建设中以及建成后,因交通设施的穿越工程、地下基坑工程施工等近接工程对周围土层或土体的变形和应力场的改变,以及施工机械的挤压、搅动、振动,等等,都有可能导致既有地铁隧道结构的受力失衡,使隧道结构发生局部的水平位移、沉降、拉伸、压缩、剪切、弯曲、扭转等诸多形变,造成隧道的坊塌、限界的改变、道床的沉降、轨道几何形位的变化等。这样可能会使隧道结构产生裂缝、形变等危害隧道安全的变化,必须及时准确地进行长期的形变监测以便及时发现和预报险情,保证隧道的施工以及运营的安全[1]。传统的结构检测是采用测距仪、水准仪、全站仪等传统的测量仪器测定待定点的变形值,而隧道病害检测主要通过人工巡视的方式。人工监测方式主要存在以下问题:一是人工检测变化量单一、状态量缺失、劳动强度高、效率低;二是人工检测时间长、易漏查误判、图像拍摄不统一、精度低[2]。
本研究针对隧道大规模场景,通过三维激光扫描与图像采集分析技术,结合隧道智能巡检机器人,具有测量效率高、精度高、人工参与度低等特点,大大提高了检测的效率与精度。并且通过采集到的数据建立地铁隧道的竣工数据原始基础数据库,构建隧道三维孪生模型,作为病害检测以及形变分析的数据基准,以数字孪生技术为主线,共同构建高效且准确的地铁隧道智能巡检体系[3]。
2 隧道智能巡检机器人
数据采集是保证地铁隧道地表测量精度和效率的第一步,也是最基本的一步,为了在高速运行的环境下采集隧道表面数据,提高隧道断面检测的效率和精度,本研究设计的智能巡检机器人主要包括数据采集模块、移动模块和存储控制模块。拟通过隧道智能巡检机器人对测量单元进行整体全面的坐标测量与收集,数据采集传感器主要分为两部分,一部分是激光雷达,通过采集的点云数据获取隧道的拟合椭圆长轴宽度值,拟合椭圆短轴宽度值,水平收敛最大宽度值,椭圆度等值,从而对隧道进行形变监测。另一部分是相机,通过相机进行图像收集,对图像进行处理分析来确定隧道病害。利用相机对隧道内影像进行获取,通过数据处理算法对收集到的图像进行分析,从而判断隧道内发生的各类病害[4]。
2.1 激光雷达数据采集模块
智能巡检机器人是由多种传感器组成的移动测量系统,每一个传感器都有自己独立的采样频率和坐标系统,采集到的数据类型也不尽相同,因此需要对各传感器采集到的数据进行空间配准和时间配准。为了建立空间基准,要拥有统一的坐标系,将惯性导航系统、三维激光扫描仪、载体坐标系的原点统一到一个基准参考坐标系中,以实现多源数据的融合,得到最终地物的地方坐标系。
扫描仪空间坐标系与载体坐标系之间的转换。采集的扫描仪原始数据一般是扫描仪原始坐标系下的极坐标,将极坐标转换成三维激光扫描仪下的坐标的转换公式如式(1)所示。
(1)
式中,(X,Y,Z)为三维激光扫描仪下的坐标;ρ表示激光发射原点到目标物体之间的距离;θ表示激光束与激光雷达机械横轴之间的夹角。
为了简化数据的预处理过程,一般将载体参考坐标系和惯性导航系统坐标系视为同一个坐标系,所以将扫描仪空间坐标系转换到载体参考坐标系可以理解为将扫描仪空间坐标系转换到惯性导航系统坐标系。
激光扫描仪坐标系转换到惯性导航系统坐标系需要进行如式(2)的变换。
(2)
式中:RC代表旋转矩阵;a1、a2、a3、b1、b2、b3、c1、c2、c3代表激光扫描仪坐标系转换到惯性导航系统坐标系的旋转参数,具体计算步骤如式(3)所示。
(3)
式中,X、Y、Z为扫描仪空间坐标系下的坐标;XC、YC、ZC为转换后惯性导航系统坐标系下的坐标。三维激光扫描仪坐标系相对于惯导坐标系之间平移参数和旋转参数用ΔX、ΔY、ΔZ、φ、w、k表示,运用关节臂激光扫描仪准确测得检校前的初始值,精度能达到亚毫米级。
将采集到的点云数据输入到自主开发的点云后处理软件系统即可获取拟合椭圆长轴宽度值,拟合椭圆短轴宽度值,水平收敛最大宽度值,椭圆度等值。进一步进行隧道形变的分析[5]。
2.2 相机数据采集模块
具体来说,为了满足采集隧道表面图像的精度要求(约0.2 mm/像素),本论文设计的相机数据采集部分,包括8个高分辨率线扫描相机、4个图像采集卡和9个线性光源。线扫描相机是本套设备的关键元素,分辨率为12 288×1。数据采集设备适用于地铁隧道检测,大多数地铁隧道规则直径为5.4 m或6.0 m,其中采集系统能够满足最小精度要求(0.2 mm/像素),在本论文中,隧道以直径5.4 m为例进行说明。
为了确保检查范围能覆盖整个地铁隧道,相机的总视场角为280°,为了满足0.2 mm/像素精度要求,采用八个高分辨率线扫描相机作为采集隧道表面数据的关键元件。在设计阶段,我们假设线扫描相机分布在隧道中心周围,每台线扫描相机的测量范围可覆盖40°区域,并且每台线扫描相机有5°的视野重叠,以确保相机能够有效采集整个隧道表面的数据。每台相机距隧道表面距离约2.5 m。在数据采集过程中,设备运行在待检区域之内,采集地铁隧道表面的全部数据。为了验证采集数据的精度,我们对精度进行了如下定义,如式(4)所示。
(4)
式中,A表示精度;Lipt表示线扫描相机的测量范围;R代表相机的分辨率。线扫描相机的测量范围为式(5)。
(5)
式中,l代表相机到测量区域的距离;θ表示线扫描相机的测量范围。为了校准线扫描相机,确定重叠区域的大小,重叠区域表示为Lolp,如式(6)所示。
(6)
式中,α是一个摄像头到另一个摄像头的角度;r是地铁隧道的半径。具体来说,地铁隧道数据采集系统覆盖区域Lcur,如式(7)所示。
(7)
式中,n表示线扫描相机的数量,通过计算所获得的图像精度为0.16mm/像素。
上述数据采集部分的设计是收集地铁隧道地表数据最重要的部分。此外,运动和控制部件是两部分其它基本组件。对于运动部件,由于线扫描相机对振动的高灵敏度,系统的稳定性若是出现问题,可能会导致采集的图像数据失真。对于系统控制,摄像机采集频率应与设备的移动速度相匹配。换句话说,频率设置与系统移动速度和分辨率精度有关。频率F定义如式(8)所示。
(8)
式中,V代表移动速度。
数据预处理的目的是增强原始图像的特征获取,这有助于系统进一步对隧道缺陷进行检测和分析。一方面,由于曝光次数有限,在图像采集期间,高速线扫描相机拍摄的地铁隧道表面图像保持低对比度。针对获取的原始图像数据对比度低的问题,提出了一种自适应图像对比度增强方法,一种在固定范围内平衡图像对比度的方法。另一方面,提出了一种由粗到精的图像处理方法用于定位缺陷,防止图像重叠区域中的缺陷重复识别。
图像拼接是预处理的另一个组成部分,目的是为了消除对重叠区缺陷检测的干扰。在本研究中,图像拼接包括水平拼接和垂直拼接,用于拼接摄像机和相邻摄像机拍摄的图像。对于图像水平拼接,由于两幅拼接图像之间没有重叠区域,因此可以直接合并时间相邻的图像。对于图像的垂直拼接,本论文提出了一种由粗到精的方法,即粗配准和精配准,用于计算变换矩阵。基于预先校准的摄像机位置计算变换矩阵,以实现图像粗配准。在此步骤中,使用不同的相机以固定的分辨率同时进行数据采集。在图像精细配准阶段,首先利用尺度不变特征变换(scale-invariant feature transform,SIFT)算法从两幅图像的重叠区域中提取特征点。然后,将一个待配准图像中的特征点设置为模板的中心,并从另一个待配准图像中提取相应的相邻特征点。在粗配准的基础上,从另一幅图像的相邻特征点中准确地搜索出对应点,实现了点对匹配。然后,应用归一化互相关(normalized cross-correlation,NCC)计算地铁隧道地表图像精细配准点对的相关性。最后,提取相关点对用于计算图像精细配准的变换矩阵,我们的方法表示为SIFT-NCC。
对于采集到的相片病害数据,使用基于深度学习的图像分析技术,我们使用改进的基于深度学习的框架,这个框架是基于快速区域卷积神经网络(faster region convolutional neural network,faster-RCNN)技术。首先,相片数据被送入主干卷积滤波器神经网络,如视觉几何图形组(visual geometry group 16,VGG16),用于生成多尺度特征地图。然后,插入一个区域建议网络(region proposal network,RPN)提取可能包含缺陷的区域。接下来,提取特征区域输入共用层以修复图片要素的分辨率。最后,根据两个完全连通的层确定提取区域的类别和边界框同时对回归进行了估计。
3 隧道智能监测可视化平台
通过隧道智能巡检机器人,获取隧道的病害与形变信息,将隧道模型与监测分析结果等多源异构数据进行有效的融合,搭建隧道智能监测可视化平台,即合肥市轨道交通隧道智能检测管理系统,该系统能够大幅提升轨道交通信息系统数据的利用率和准确度,从而实现跨阶段数据的有效共享,避免了关键信息易缺失以及传统纸质文档信息查询效率低下的弊端,使每个阶段的后续工作都更有延续性。实现对隧道结构状况进行三维可视化表达。将数字化管理技术与数字孪生技术应用到合肥市轨道交通项目上,依托全寿命周期信息化管理平台,实现基础数据与检测数据的管理,成果的生成,三维模型与数据的展示,系统配置。如图1所示,展示系统中的部分内容[6]。

图1 合肥市轨道交通隧道智能检测系统顶层设计
通过地理信息系统(geographic information system,GIS)大场景展示当前试点应用线路走势,试点应用隧道、车站重点标记显示,大场景下主要是对病害形变统计图表和预警信息看板做分析。然后通过GIS大场景快速定位到所感兴趣区间的三维模型,在隧道内部漫游,进行数字化浏览与管理。
通过数字孪生首页GIS大场景进入感兴趣的三维模型隧道,可视化的展现不同区段结构设计,其中管片结构建模细化至管片块、螺栓、注浆孔,管片接缝进行单元化处理,可以便捷地查询不同病害形变下结构的信息。
隧道结构中可进行单环精细化展示,选择单环可展示该位置处工程资料、管片缺陷情况,管片监测预警情况等,如图2所示。
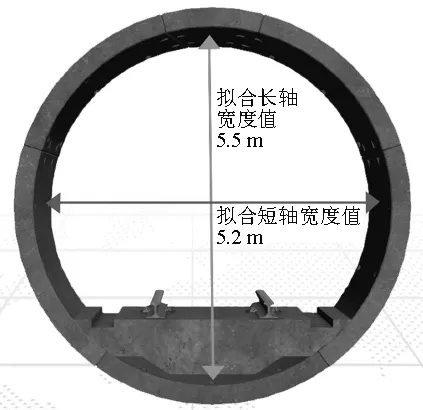
图2 单环展示
数据的分析是指对隧道区间的结构形变和管片病害汇总信息以折线图,柱状图的形式进行统计分析。其中,病害统计分析是按线路、区间对时间、病害类别、病害等级进行曲线、柱状图统计。形变分析包括统计查询和趋势分析,其中,统计查询是按照线路、区间统计查询环号-水平最大宽度值曲线图与水平最大宽度值-环号区间分布柱形图。趋势分析是指任意选中若干个截面,可生成该环号处横剖面图,在图中拟合形变曲线(通过横剖面最大直径和最小直径大致描出变形走势)标识出水平收敛最大宽度值,如图3所示。

图3 形变分析
4 结束语
地铁隧道结构检测是一项长期的任务,城市经济、建设的发展对地铁隧道结构检测的高效性、准确性提出了更高的要求。本论文对隧道无人巡检机器人技术进行研究,解决隧道结构形变与表面病害快速采集问题,并建立地铁隧道运营数据库,作为运营维护以及形变、病害分析的数据基准,以数字孪生技术为主线,共同构建高效且准确的地铁隧道智能巡检体系,实现隧道全生命周期管理的信息化、流程化、无纸化,利用大数据分析技术深入挖掘资产数据价值,全面提升基础设施运维管理的效率与质量。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
机械工业标准化与质量(2022年8期)2022-10-09
现代仪器与医疗(2022年2期)2022-08-11
导航定位学报(2022年2期)2022-04-11
语数外学习·高中版中旬(2021年11期)2021-02-14
华东师范大学学报(自然科学版)(2018年3期)2018-05-14
考试周刊(2018年15期)2018-01-21
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
中国动物保健(2015年4期)2015-10-21
现代营销·经营版(2015年3期)2015-04-20
