一种基于导引头远距离探测信息的无人机对准目标方法
2022-08-17 10:53:20陈建东李允伟胡龙兵
教练机 2022年2期
陈建东,李允伟,胡龙兵,张 林
(航空工业洪都,江西 南昌, 330024)
0 引言
对于目前某些安装了具有较远探测距离导引头的无人机,当导引头在远距离捕获到目标后,因为距离较远,由无人机和目标相对运动产生的视线角速度往往小于导引头自身的随机噪声幅度。这导致无人机在飞往目标上空时,产生较大的侧向偏离,当有侧风干扰时,其侧向偏离量更加严重,最终使得无人机进入制导攻击的初始条件较差,且无法按照预定的进入方位攻击目标。 本文依据导引头信号特性,给出了一种方法,可以使无人机的偏离量缩小至原来的20%以内,为末制导攻击创造良好的初始条件。
1 航向对准方法
1.1 传统方法简介[1]
传统方法可以概括为: 航向视线角速度+ 比例导引+ 过载驾驶仪, 其中航向视线角速度使用导引头输出的信号,导引方式为比例导引,无人机使用过载驾驶仪(STT)响应操纵指令,进行目标精对准。

无人机接入航向视线角速度导引信号时, 由于无人机已经使用BTT(Bank To Turn,倾斜转弯)方式进行了粗对准,所以无人机速度矢量在纵向(机目连线,且位于无人机当地水平面)的分量较大,而在侧向(垂直于机目连线,且位于无人机当地水平面)的分量很小,导致相对运动产生的视线角速度量级较小,下面以侧向相对速度0~30m/s,机目距离0~60km 计算,如图1 所示。
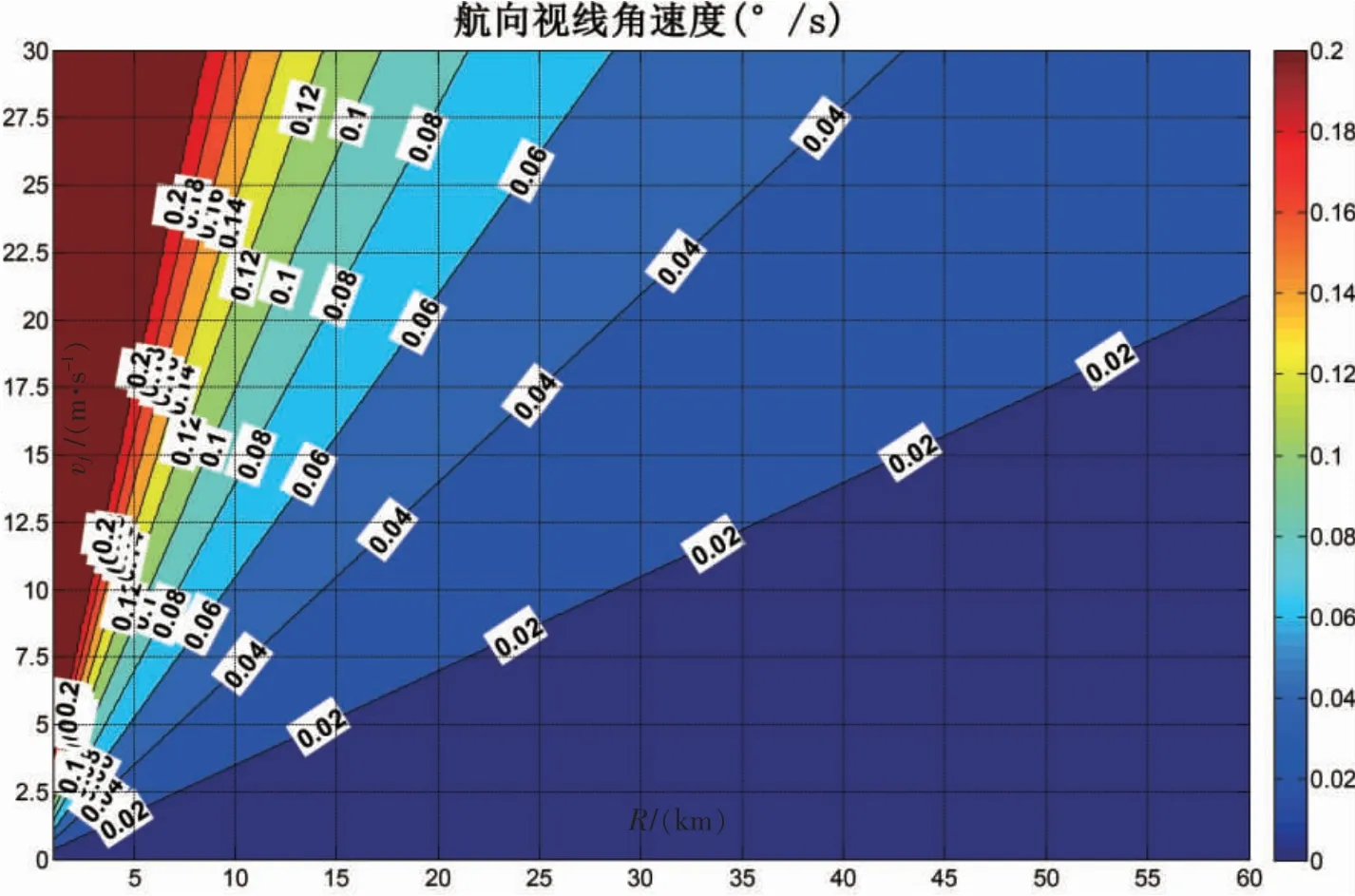
图1 理论航向视线角速度图
图1中,对于大于0.2°/s 的值进行了限幅,根据计算结果可知,使用传统的比例导引方法时,由于理论航向视线角速度远小于导引头的测量信号噪声幅度,将近有一个数量级的差距,必然使得无人机无法对准目标。
1.2 远距离航向对准方法原理
针对远距离时导引头输出的视线角速度幅值较低问题,本文提出以下方法:
①根据导航系统输出的东向速度V和北向速度V求得航迹偏角:
②根据导引头输出的航向框架角E和导航系统输出的航向角Ψ 求得目标方位角:
③使用航迹偏角和目标方位角求得偏差信号:
④使用该偏差信号代替导引头输出的视线角速度信号作为制导信号的输入,乘以无人机导引比k后生成侧向加速度指令a,无人机同样使用过载驾驶仪(STT)响应操纵指令,进行目标精对准,如图2 所示。

图2 远距离航向对准原理图
⑤传统方法切换
由于使用角度信息在近距离时面临快速性不足问题,因此当无人机距离目标足够近时,切换回传统方法,使用导引头输出的视线角速度及比例导引产生侧向加速度指令a,无人机自动驾驶仪则继续使用过载驾驶仪(STT)响应操纵指令,进行目标精对准。
1.3 信号变换和滤波
实际实施时,传统方法和本文提出的方法均需对相关信号进行变换和滤波,由于此问题与本文主题无关,这里不再展开讨论。
2 试验对比验证
使用传统的方法开展飞行试验,图3 所示为某次飞行试验侧偏图。 从图中可以看出,接入航向视线角速度导引信号后,无人机偏离航线最大可达100m 以上。
图3 飞行试验侧偏图
使用本文提出的方法开展飞行试验,图4 所示为某次飞行试验侧偏图。从图中可以看出,接入航向视线角速度导引信号后, 无人机偏离航线最大为20m,不超过原值的20%。
图4 采用本方法后的飞行试验侧偏图
3 结论
对于由于距离较远导致的导引头输出视线角速度幅值小于测量噪声幅度的问题,本文提出了综合导航系统信息和导引头输出信号求解速度矢量的角度偏差的方法,在距离较远时使用速度矢量的角度偏差引导无人机精确对准目标,在距离较近时则切换为传统方法,使用导引头输出的视线角速度引导无人机;经过仿真和飞行试验,该方法取得了良好的效果,可以将侧向偏差控制在原方法的20%以内,提高了飞行器攻击目标时的进入方位精度,降低了进入末制导状态时的初始误差。
猜你喜欢
新世纪智能(高一语文)(2021年3期)2021-07-16 08:30:16
民用飞机设计与研究(2019年4期)2019-05-21 07:21:26
当代陕西(2018年12期)2018-08-04 05:49:20
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
电子制作(2017年24期)2017-02-02 07:14:16
制导与引信(2016年3期)2016-03-20 16:01:58
火控雷达技术(2016年1期)2016-02-06 02:18:01
探测与控制学报(2015年4期)2015-12-15 15:01:00
弹箭与制导学报(2015年1期)2015-03-11 15:32:08
弹箭与制导学报(2015年1期)2015-03-11 15:32:06