基于蚁群算法优化的车辆主动防侧倾模糊PID控制研究
2022-08-16 10:30:12谷磊
南京工程学院学报(自然科学版) 2022年2期
谷 磊
(徽商职业学院, 安徽 合肥 231201)
车辆由于侧倾导致的道路交通安全事故频发,尤其当车辆载重超过其自身荷载时,车辆重心呈现出一种偏高趋势,当车辆驾驶员突发大幅度转向时,便会使车辆发生侧倾,甚至有可能导致交通安全事故[1].因此,控制车辆载重,可提高车辆在行驶中的稳定性,有效地解决车辆侧倾问题.
有研究提出了针对车辆主动防侧倾的控制方法,这些控制方法大多数集成了差动控制技术、主动控制技术、悬挂控制技术[2].当前的控制技术可在某种程度上降低车辆发生侧倾的概率,但这些控制技术均属于增加驾驶员操作次数的控制方式;而主动式控制方法与悬挂式控制方法需要在指定车辆内安装复杂的装置构件[3],成本较高,目前利用率相对较低.
为此,本文在相关研究成果的基础上,引进蚁群算法,通过对车辆侧倾瞬时行为的动力学分析与仿真,得到一个最优控制参数,以此为依据,对当前的控制方法进行二次设计与优化,减少侧倾现象.
1 基于蚁群算法优化的车辆主动防侧倾模糊PID控制方法
1.1 构建车辆行进状态的数学模型
为了实现对车辆的主动防侧倾控制,需要掌握车辆在行进过程中车身的运行状态及其在发生侧倾行为时车身的瞬时变化.构建一个车辆行进状态的数学模式,确定车辆在此种状态下压电元件的分布位置,从而得到一个针对压点控制函数的车身结构动力学传递模型.此时,需要在待测车辆上布置至少80个检测点,使用激振设备对车身进行激振,使车辆在一个指定范围内发生振动行为[4].利用数据采集装置对车身的振动频率进行获取,并将采集的信号通过通信装置传输到计算机,使信号呈现一种数字化趋势,根据信号的表达方式,可以得到一个车辆在瞬时侧倾状态下的频响函数.结合函数表达式,可以初步掌握车辆在侧倾时的模态特性;使用分析软件,对车辆进行函数曲线的终端拟合,得到该车辆侧倾震荡模型,如图1所示.
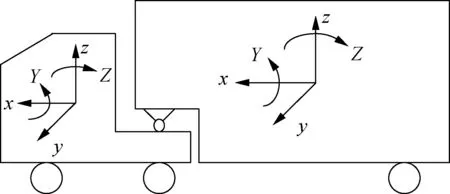
图1 车辆侧倾震荡模型
图1中,箭头方向分别表示车身的3个受力方向与侧倾方向.根据车辆行进过程中存在的惯性,对车身侧倾时8个模态的变化进行描述[5],如表1所示.
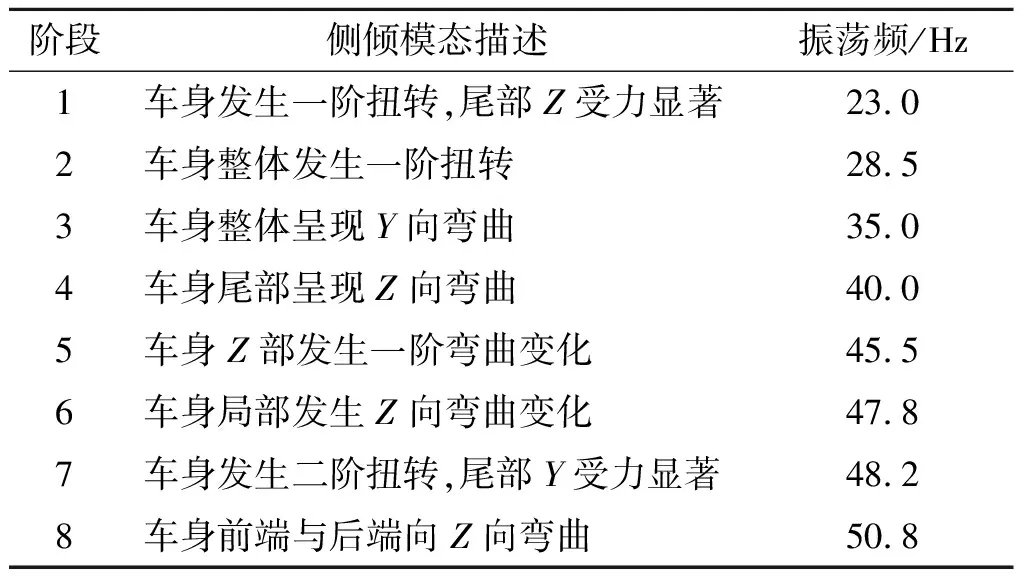
表1 车身侧倾模态变化描述
运用计算机终端的辨识算法对检测点输入数据与输出数据之间的距离进行计算.在此过程中,采用Matlab软件中的辨识工具箱对震荡信号进行获取,并将前端输入的检测信息作为评估状态信息的空间表达方式,检测过程表达式为:
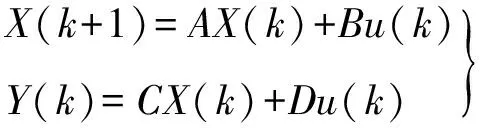
(1)
式中:X为车辆在发生瞬时侧倾时的倾量;Y为车辆在竖直方向上受到的动力学特性;A为车身对侧倾作用力的分配量;C为测量的侧倾量;D为测点;B为输入的侧倾量;u为状态校准系数;k为车身状态变量.
将计算式(1)与图1中内容进行对接,便可得到一个针对车身侧倾的动力学研究模型.
1.2 基于蚁群算法优化设计主动防侧倾PID控制函数
引进优化的蚁群算法,采用构建主动防侧倾PID控制函数的方式,对车辆侧倾现象加以主动控制,并通过在一系列组合优化问题中寻找最优解的方式,实现对车辆的有效控制.蚁群算法不要求控制模型具有较强的适应性,即便模型的适应度较低,算法也可以通过自身行为迭代的方式进行静态差值的计算[6].在此基础上,将蚁群算法与PID控制器进行对接,实现对控制端参数的及时调整,以此实现车辆在行进过程中侧倾现象与控制量之间呈现一种非线性映射关系,并利用算法的鲁棒性特征,提高算法求解的效率.
为了实现对主动防侧倾PID控制函数的设计,可参照蚁群的生物活动行为,将每一个控制变量看作一个独立作为参数,对其优化的行为便是指在计算过程中对不同参数变量的融合,使独立蚂蚁个体构成一个具有组织性特征的蚁群[7].车辆在行进时,可将蚂蚁释放的信息素作为导向,动态化地控制车辆行进状态,使车辆向稳定行驶目标不断逼近,直到找到最优目标路径.此时,输出最优路径的非线性映射函数,便可将其认定为主动防侧倾PID控制函数.
控制蚂蚁从原点开始爬行,当蚁群中第n只蚂蚁爬行到下一个目标点时,认为此时蚂蚁的行进路径有i条,则蚂蚁对指定行进路径的选择概率公式为:
(2)
式中:φ为蚂蚁对指定行进路径的选择概率;i为行进路径总数;yi为蚂蚁选择i路径时的行进量;tj为蚂蚁行进周期;τ为信息量;η为信息可见度.
当蚂蚁按照所有行进路径完成一个迭代行为时,记录最小函数的爬行路程与信息量,由此便可得到一个参数相对最优解[8].蚁群在爬行过程中的目标函数计算式为:
(3)
式中:e为蚁群;J为蚁群在爬行过程中的目标函数;ω为爬行中的参数;U为时间常数.
输出表达式J作为主动防侧倾PID控制函数的映射.
1.3 求解PID函数的模糊化最优控制解
对主动防侧倾PID控制函数进行模糊化最优控制解求解,获得精准的求解数值才能确保对车辆侧倾控制的有效性.在计算机终端对数据进行实时更新,掌握信息的增量与增量信息的变化趋势[9].过程为:初始化处理车辆行进参数→初始化处理蚁群行进路径→初始化循环变量参数→模拟蚂蚁爬行过程→寻找最优解→模糊化处理最优解集合→更新PID控制参数→判断模糊量→将模糊量作为参数校正量→更新车辆行进状态的信息素→定位模糊集合中的最优解→输出最优解.
此过程涉及最优解集合的迭代处理,假定循环次数最高为p,此时需要模拟人脑思维,对PID进行参照性推理,得到多个控制变量,每一个控制变量均可以作为控制车辆主动防侧倾的PID参数.在车辆行进时,可根据实际情况选择与之匹配的参数变量进行调控,而一旦执行端发生控制行为后,如车身无明显变化,后端将自动执行下一个控制参数,直到车身发生显著的偏差变化.为了避免执行指令出现延迟问题,可在模糊解集合中设定多个维度的数据传输路径,即多个参数同时进行车身的调控,以此提高车辆在行进状态下的综合性能,过程如图2所示.
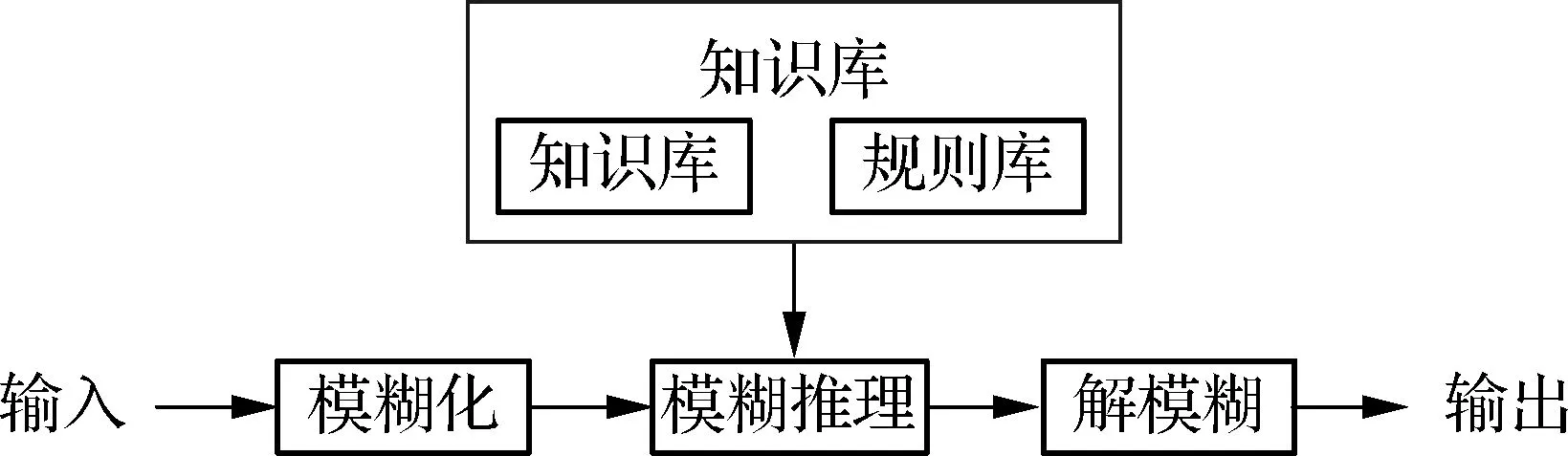
图2 模糊解集合迭代过程
按图2所示的流程对模糊解集合进行多次迭代,在迭代过程中,为了提高控制行为的精度,需要在车辆平衡点附近进行多次极限振荡行为,使车辆在相对稳定的状态下实现侧倾控制.此外,计算机前端输入的控制侧倾角度需要与车辆行驶过程中的加速度进行对接,明确车辆在不同加速度行驶状态下控制侧倾所执行的行为是不同的,需设定一个加速度参数对PID控制器的参数变量进行调控,实现对车辆侧倾的控制.
2 仿真分析
2.1 仿真试验平台
考虑到使用真实的车辆进行侧倾控制试验存在一定危险性,且试验成本过高,选择在仿真平台上进行试验操作,仿真操作平台的构成如表2所示.
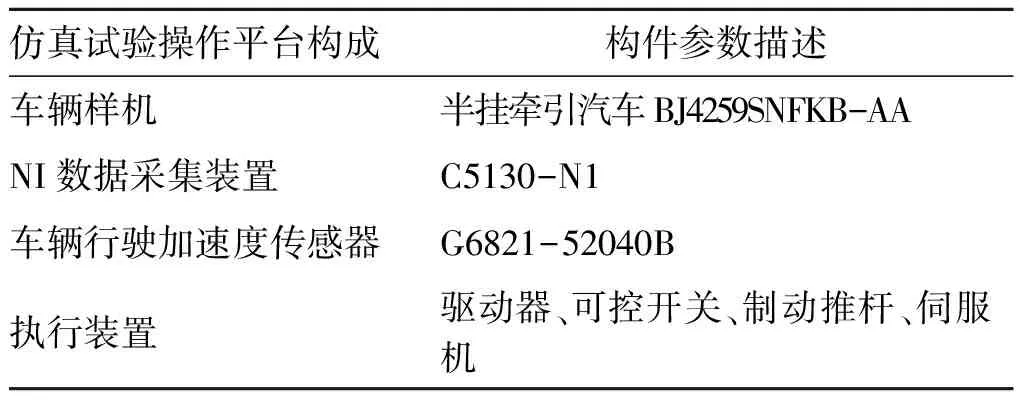
表2 仿真试验操作平台构成
仿真试验时,将实验平台与计算机设备进行通信连接,将驱动系统与传感器采集系统进行连接,实时获取车辆在仿真运行状态下的行驶状态.使用采集卡与USB端口将信息导入计算机,在计算机上进行车辆的模拟侧倾,运用联合算法对侧倾量进行控制,并将控制量输入到前端执行装置,由执行机构中的组织性构件对车辆行进行为进行调控.仿真界面如图3所示.仿真试验的样机车辆参数与质量如表3所示.
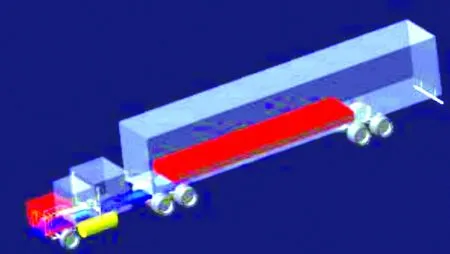
图3 仿真界面
仿真分析用于控制车辆主动防侧倾的操作系统为伺服机构系统.为了避免伺服机构系统的运行受到外界环境等相关因素的干扰,在仿真平台上进行伺服机构系统的参数设定,如表4所示.
以车辆侧倾角度作为评价方法,在相同的环境下,选择现有控制方法与本文方法对样机车辆进行模拟侧倾对比试验.
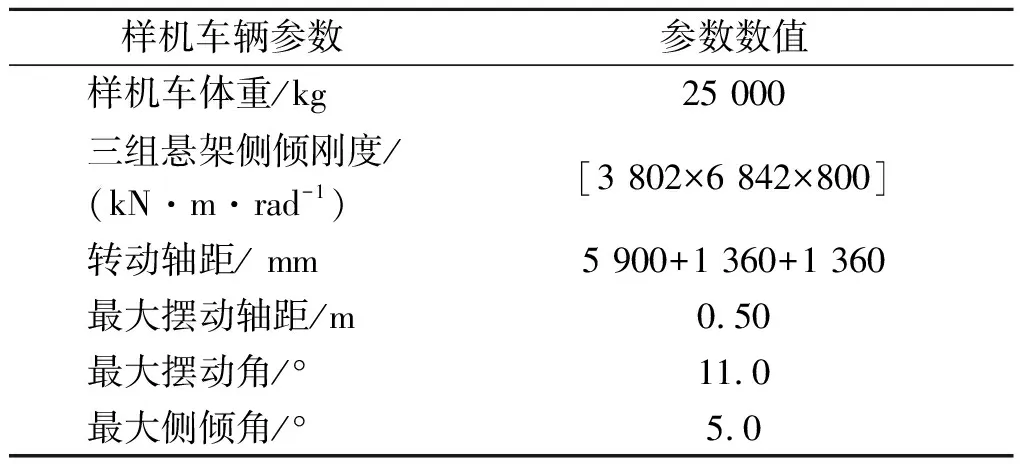
表3 样机车辆参数与质量描述
表4 伺服机构系统参数设定
2.2 结果分析
采用NI传感器对不同加速度下车辆的侧倾角度进行获取,将获取结果传输到计算机终端,绘制仿真分析结果,车辆侧翻角度对比结果如图4所示.
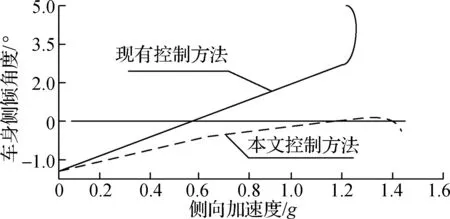
图4 车辆侧翻角度对比结果
根据图4所示的试验结果可知:0°为车辆标准侧倾角度,在此角度下,车辆行驶稳定;现有控制方法在对车辆进行控制时,侧向加速度达到1.2g,侧倾角度急剧增加,此时车辆发生侧翻;在本文设计方法控制下,车辆侧倾角度逐步趋近于平缓,在侧向加速度达到1.2g时,侧倾角度几乎为0,证明此时已实现了对车辆侧倾的主动控制,车身在运行中趋近于稳定.对比试验结果表明:相比现有控制方法,本文设计的基于蚁群算法优化的车辆主动防侧倾模糊PID控制方法可以有效地控制车辆在行进过程中侧倾角度,提高车辆在行驶中的稳定性.
3 结语
本文提出了一种基于蚁群算法优化的车辆主动防侧倾模糊PID控制方法,通过对比试验验证了本方法的可行性,可以有效控制车辆在行进过程中出现侧倾,在一定程度上提高了车辆道路行驶的安全性.
猜你喜欢
世界汽车(2022年11期)2023-01-17 09:30:50
小太阳画报(2018年3期)2018-05-14 17:19:26
少儿科学周刊·儿童版(2017年5期)2017-06-29 01:27:44
学苑创造·A版(2017年3期)2017-04-27 13:17:17
阅读与作文(小学低年级版)(2016年12期)2016-12-22 19:35:04
少年博览·小学低年级(2016年9期)2016-11-24 06:21:37
汽车文摘(2015年11期)2015-12-02 03:02:53
汽车维修与保养(2015年7期)2015-04-17 02:12:44
汽车维护与修理(2015年6期)2015-02-28 12:17:31
汽车维护与修理(2015年2期)2015-02-28 12:15:51