
超短基线水声定位仪量值溯源方法研究
2022-08-12 09:30:42张明敏柳义成
工业仪表与自动化装置 2022年4期
张明敏,柳义成
(交通运输部天津水运工程科学研究所,天津 300456)
0 引言
超短基线水声定位仪(以下简称“水声定位仪”)是水运交通研究的基本设备,其工作原理是在水下被定位的目标上安装声信标,水上的船体安装超短基线基阵,声信标发出声信号,水声定位仪换能器接收到信号后测算出目标的距离[1-2]。因为无线电波在水中的快速衰减使GPS的定位手段无计可施,声波是目前最有效的水下远距离传播的信息载体[3-4],因而水声定位仪在海洋、水运领域有愈来愈广泛的用途,例如海洋探测研究与资源开发、海上救援搜寻、沉船打捞、电缆布设等方面都离不开水声定位仪为其提供高精度、高质量的定位资料[5]。然而,由于其使用环境复杂多变,仪器自身性能改变等因素,往往造成测量结果的失效或缺失,给海洋、水运研究工作带来人力和财力上的巨大损失。在水声定位仪的实际使用中,由于缺乏专业的计量校准系统,国内外研究人员只能认可生产厂家“标称”的各项性能指标和探测能力,亦或是只能进行试验比对或自行校准的方法,缺乏对水声定位仪测量性能的准确评价。在这种情况下,水声定位仪测量结果的准确与否将对海洋工程及水运工程的建设质量、勘察、设计和模型试验的结果产生较大的影响[6-9]。因此,定期采用各种手段对仪器的计量性能、可靠性、适用性等进行测试和评价就显得尤为重要。
该文依托天津港的船闸水池,基于设计的多维运行控制机构提出水声定位仪斜距的计量溯源方法,将填补水下定位系统计量检测技术空白,为水下定位研究保驾护航。
1 水声定位仪结构组成及工作原理
水声定位仪主要由水下声学测量设备和水上数据采集处理设备两大部分组成,其中水下声学测量设备由安装在船体的换能器基阵和安装在水下移动载体的声信标组成,结构示意图如图1所示。声学换能器发射声波信号至声信标,声信标在收到讯问信号后,发射区别于讯问信号的响应信号回换能器,响应信号经由通讯电缆传输给甲板处理单元。
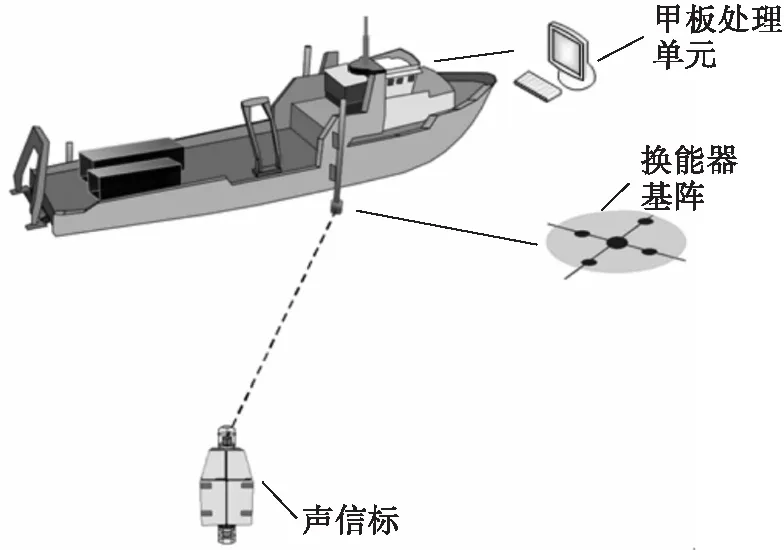
图1 水声定位仪结构示意图
2 校准装置及配套设施
选择计量标准器及配套设施应当遵循以下原则:
(1)水声定位仪有相关计量检定规程和国家标准时,选择的计量标准器应当满足或优于技术文件中的要求;
(2)对于测量结果有较大影响的仪器设备,例如水声定位仪测量过程中用于声速校正的声速剖面仪,应进行有效的溯源。
水声定位仪校准系统的设计参数要求如下:
(1)多维运行控制机构该文设计的多维运行控制机构包括水平移位、升降、回转及转接法兰盘几个部分,其中水平移位部分随试验行车在导轨上实现远距离水平运动,运行速度为0.6 m/s;升降部分实现水声定位仪换能器与声信标在水面垂直方向的精确位置控制;回转部分实现水声定位仪水平旋转运动;转接法兰盘用于多维运行控制机构与水声定位仪的机械连接。多维运行控制机构实物图如图2所示。
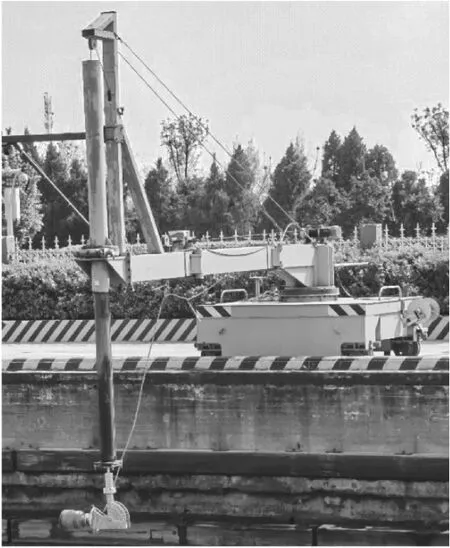
图2 多维运行控制机构
(2)声速剖面仪最大允许误差为±0.2 m/s,为水声定位仪提供标准声速值,实物图如图3所示。

图3 声速剖面仪
(3)钢卷尺准确度等级为1级,型号选5 m型,经检定的钢卷尺用于标定多维运行控制机构行驶轨道的刻度。
3 校准方法

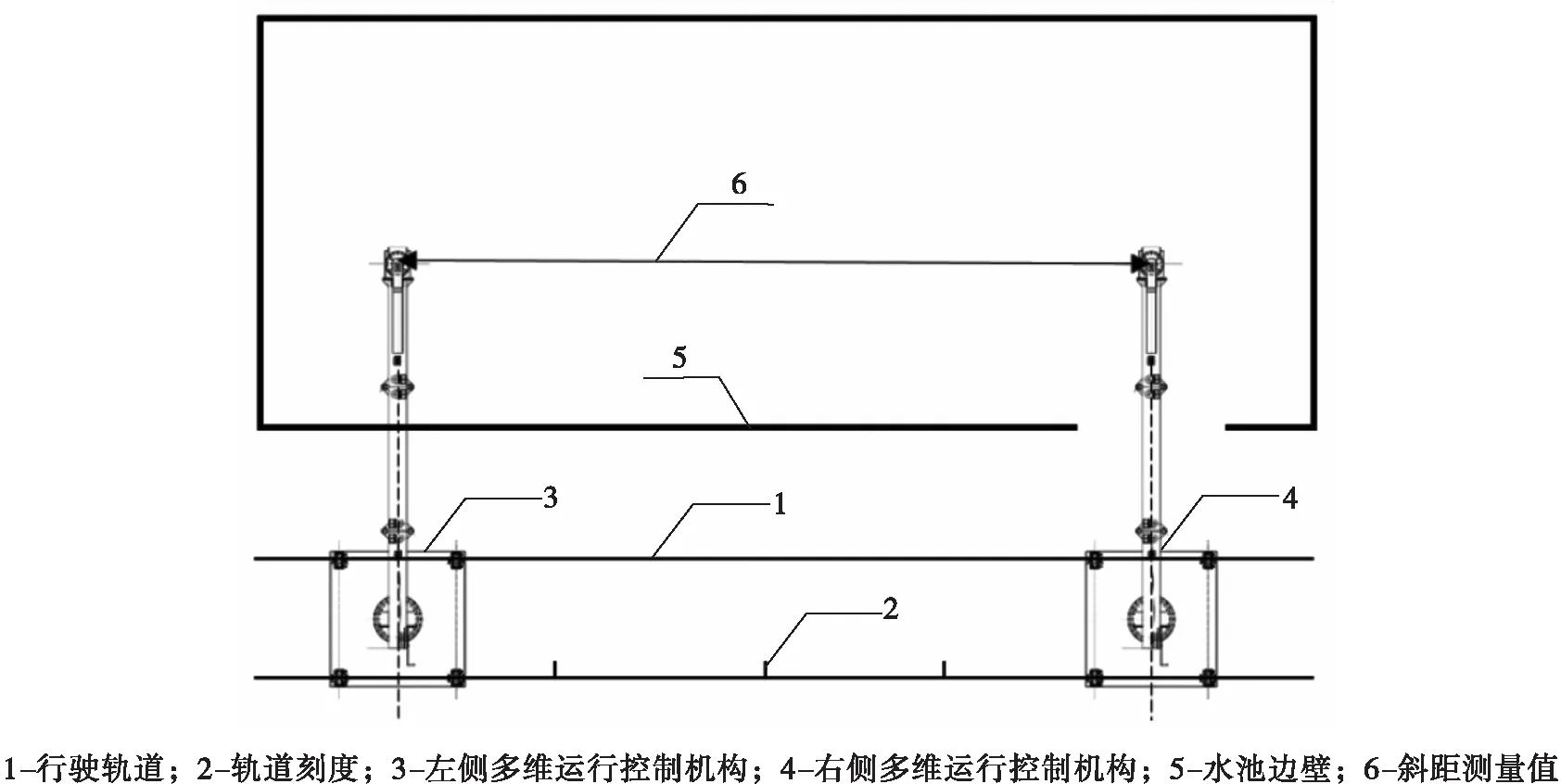
图4 斜距校准原理图
(1)

4 校准结果
选用Ranger-2型水声定位仪作为试验样机,按前述校准方法开展斜距校准试验。图5是换能器距离声信标5 m处数据采集软件实测效果,校准结果如表1所示。由表1可知,Ranger-2的斜距示值误差随斜距的增加而增大,各校准点的示值误差均小于JJG(交通)152—2020《超短线水声定位仪》中规定的斜距最大允许误差±(0.5+R×3%),其中R表示斜距测量值[10]。
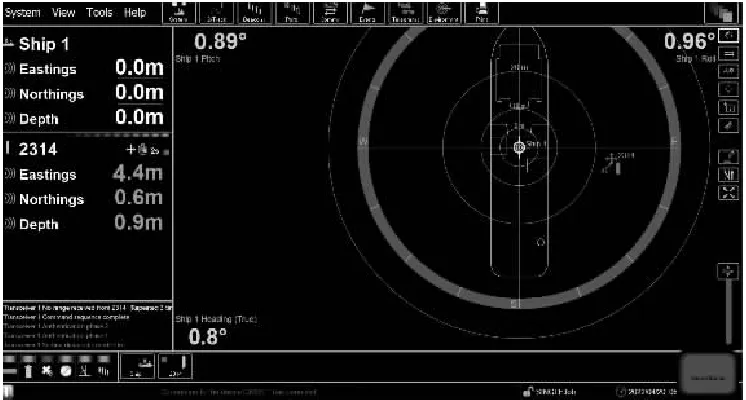
图5 Ranger-2数据采集软件实测效果

表1 试验样机校准结果
5 测量不确定度评定
对上述试验方法和试验结果开展测量不确定度评定,以验证该文提出的校准方法是否合理。
5.1 数学模型
(2)

5.2 合成灵敏度系数
式中灵敏系数为:
5.3 计算分量不确定度
此测量不确定度为被校准设备所引入的测量不确定度,主要影响因素为测量重复性所引入的测量不确定度分量。在测量不确定度评价的过程中,采用标准斜距为100 m时水声定位仪采集的数据,作为代表性数据开展测量不确定度的评价,重复测量10次,测量数据见表1。采用测量不确定度的A类评定方法计算标准不确定度,使用贝塞尔公式计算标准偏差,计算平均值的测量不确定度。
(2)钢卷尺测量引入的测量不确定度分量u(L)

(3)声速剖面仪引入的标准不确定度u(ΔL1)
(4)由安装误差引入的标准不确定度u(ΔL2)
仪器安装位置误差引入的不确定度分量u(ΔL2)来源于水声定位仪换能器的安装偏差,安装偏差由测深钢卷尺引起。测深钢卷尺的最大允许误差为±0.5 mm,由此引起的测距不确定度分量为0.3 mm。
5.4 合成标准不确定度
=0.10 m
5.5 扩展不确定度
取扩展因子k=2,则扩展不确定度为U=k×uc(ΔL)=0.20 m
5.6 测量不确定度的报告与表示
水声定位仪的斜距测量不确定度U=0.20 m(k=2),小于被测仪器最大允许误差绝对值的1/3,满足测量不确定度合格判定的要求,该方法具有合理性。
6 结论
随着水声定位仪的应用日益广泛,其校准需求不断增加,亟需开展相应仪器的计量研究工作。该文介绍了水声定位仪的结构组成及工作原理,提出了水声定位仪的校准方法,并选取样机进行了试验测量,得到被测仪器的斜距示值误差。测量结果与测量不确定度符合规定指标,验证了该校准方法的可行性及合理性。
猜你喜欢
哈哈画报(2022年3期)2022-05-06 19:58:25
电力勘测设计(2022年2期)2022-03-08 09:54:52
中国惯性技术学报(2019年5期)2020-01-07 08:17:50
发明与创新(2019年42期)2019-11-18 01:24:04
发明与创新·大科技(2018年2期)2018-03-17 20:50:32
电子世界(2017年15期)2017-08-30 00:17:22
测绘通报(2017年2期)2017-03-07 09:58:46
消费导刊(2017年21期)2017-01-28 11:05:29
福建质量管理(2016年9期)2016-12-09 02:41:01
浙江大学学报(工学版)(2015年12期)2015-07-11 10:10:22
