
基于STM32和SCA100T的数字倾角传感器设计与标定
2022-08-12 09:29:58韦宏利刘艳杰郭嘉豪
工业仪表与自动化装置 2022年4期
魏 秀,韦宏利,刘艳杰,郭嘉豪
(西安工业大学 电子信息工程学院,陕西 西安 710021)
0 引言
随着科技的不断发展,人们对于仪器的监测以及控制提出了全新以及更高的要求,同时,对于检测的传感器精度也随之增高了要求,但由于传统的测量方法精度较低,更没有实现智能化,因此在检测仪器中注入单片机技术,这样不仅使得检测仪器具有智能化而且检测精度也大大提高了。该系统是以双轴倾角传感器SCA100T-D01和STM32F103为控制元件设计的一款测量系统,该系统支持多种输出接口。同时,由于电路元件在温度和时间上存在着一定程度的漂移,从而影响了倾角传感器的准确性。因此,为了保证工程项目的合格性、产品的可靠性以及测量结果的准确性,有必要对传感器进行标定处理,以期获得满意的效果[1-3]。
1 测量原理
倾角传感器一般用来进行系统的水平测量,其理论基础是牛顿第二定律[4]。到目前为止,已经有了单轴与双轴角度传感器,一些场景下还需要测量三个轴向的信息量,因此,三轴传感器也随之出现了,它们的测量范围也有所不同。从工作原理上将其划为分固体摆式传感器、液体摆式传感器以及气体摆式传感器等三大类[5];该系统采用的倾角传感器SCA100T-D01是由芬兰 VTI 生产的双轴倾角传感器的系列产品,它属于固摆式倾角传感器,该种类型的传感器主要是把测量到的静态重力加速度的变化量转换为倾角信息量的变化,如下图1所示为固体摆式的示意图,它是由摆锤、摆线和支架组成的。

图1 固体摆式原理示意图
摆锤受重力G和摆拉力T的作用,根据平行四边形法则,其合外力F为:
F=Gsinθ=mgsinθ
(1)
其中:摆线与垂直方向的夹角为θ,在角度范围较小的测量中,可以认为F与θ呈线性关系。
2 系统整体设计
整个系统包含电源电路,角度测量电路、主控电路、A/D模块电路、数据采集与输出电路。整个设计以传感器为前端测量元件,输出的信号通过A/D模块和微处理器处理模块进行处理并输出。
系统采用宽电源供电(12~24 V),经电源变换后分为两路,一路是由精密稳压芯片REF195输出高稳定的5 V电压,专为传感器供电,以提高传感器的输出稳定性;另一路是由 LM2594经过稳压电路转换后,输出的3.3 V电源,为单片机系统提供工作电源。
系统中设计了工业上常用的两种输出接口电路,方便用户选择其一进行数据输出。
系统的整体结构框图如图2所示。

图2 系统整体结构框图
3 系统硬件设计
3.1 主控STM32F103模块
该系统的处理器采用的是ARM公司生产的32位的 Cortext M3内核的STM32F103C8T6微处理器,该款处理器具有2.0~3.6 V的宽电压供电范围,还具有容量为64 KB的FLash 存储器和容量为20 KB的SRAM 存储器,与此同时,该款处理器具有丰富的接口资源(定时器、DMA 控制器、SPI、IIC、USB等接口)以及中断系统,性能稳定,处理速度快,因此,保障了系统的稳定并高效的运行[6-7]。
其原理图如图3所示。

图3 STM32F103原理图
3.2 SCA100T-D0模块
系统采用的加速度计是由芬兰 VTI 公司开发的一种基于3D-MEMS 技术的双轴加速度计SCA100T-D01,其实物图如下图4所示,加计电路原理图如下图5所示。

图4 SCA100T-D01倾角传感器实物图

图5 加计电路原理图
加计所需电压为直流5 V电压,其工作电流约为4 mA,片内集成了11位的A/D转换器,转换时间150 μs,温度的工作范围为-40 ℃~+125 ℃ ,其内部含有的温度传感器可以对温度进行补偿[8-10],输出的X0与Y0分别与A/D转换模块的11和12引脚通过100R的电阻相连,系统所用的SCA100T-D01的灵敏度为4 V/g,它的输出电压值与角度值之间有如下的关系式:
(2)
其中:Dout为传感器的数字量输出;Sens为传感器的灵敏度。
3.3 电源模块
由于该系统支持宽的供电电压范围,当外电源提供12 V的供电电压时,LM2594通过稳压电路1117-5 V与1117-3.3 V转换后,为微处理器MCU供电;采用精密电源 REF195 为传感器供电,与此同时,对于电源设计需要加入过压保护以及反向保护。
REF195部分电路原理图如下图6所示。
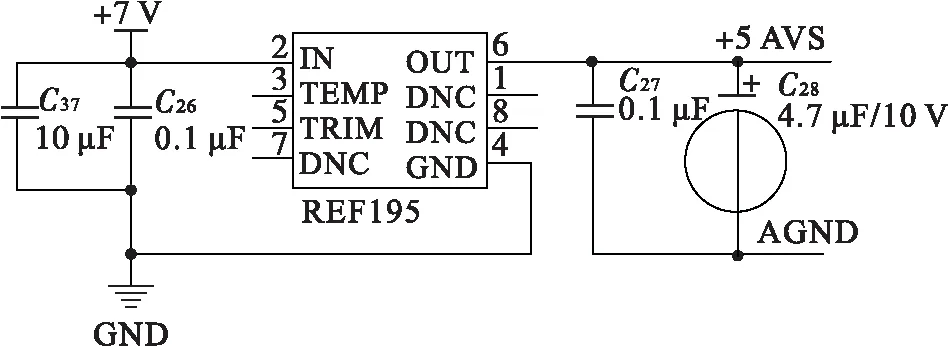
图6 REF195原理图
3.4 A/D模块
考虑到角度输出范围以及精度的要求,A/D 转换芯片选择 24 位的 A/D 转换芯片AD7190,采用TSSOP24进行封装并支持两路差分输入或四路伪差分的输入,ADC的信号时钟源是片内的4.92 MHz的时钟信号产生的,其引脚图如下图7所示。
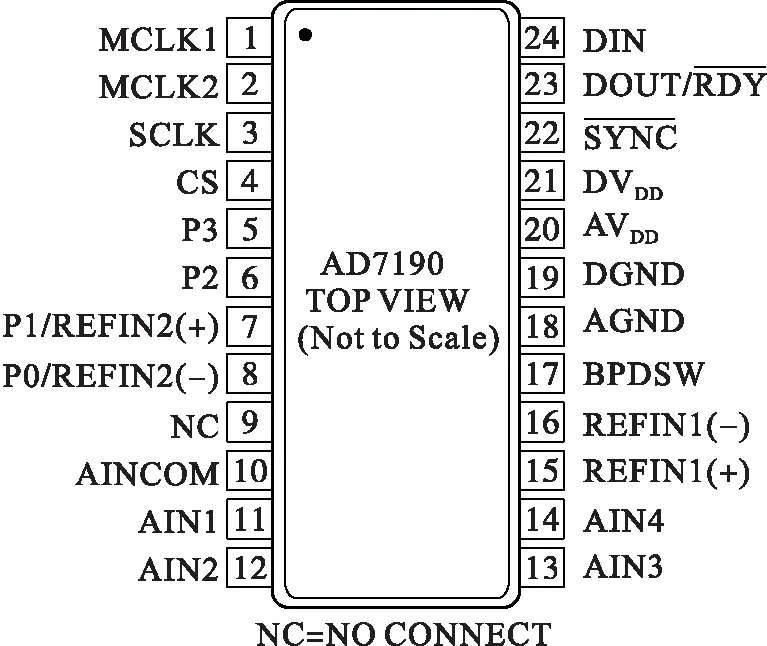
图7 AD7190引脚图
3.5 RS485模块
该模块选用的芯片为MAX3483,所需电源为3.3 V,MAX3483原理图如下图8所示。

图8 MAX3483原理图
4 系统软件设计
系统的程序设计使用 Keil uVision5软件进行编程,主要包括控制部分、初始化部分、信号收集部分与转换部分以及通信部分。
(1)控制部分主要对SCA100T进行控制;
(2)系统初始化部分就是在系统运行之前进行检查,排除一切可能影响到正常工作的因素,并对控制系统进行复位;
(3)信号收集及转化部分是读取双轴测量数据和内部温度值、完成电压值-角度的变换、输出数据的修正、接收串口命令,输出测量数据;
(4)通信部分,其通信传输帧结构定义如表1所示。

表1 帧结构定义(单位:字节)
表1中:
报文长度:含报文头和校验位;
通讯地址2个字节,第1个字节为传感器类型(双轴倾角传感器为:0x02),第2个为传感器地址字节;
帧类型:0x01为设备到传感器,0x02为传感器到设备;
报文类型:0x01为设置地址,0x02为查询地址,0x03为设置工作方式,0x04为查询工作方式,0x05读取即时数据;
报文内容:长度不定;
校验位:累加和校验。
系统软件流程图如下图9所示。

图9 系统软件流程图
A/D子模块流程图如下图10所示。
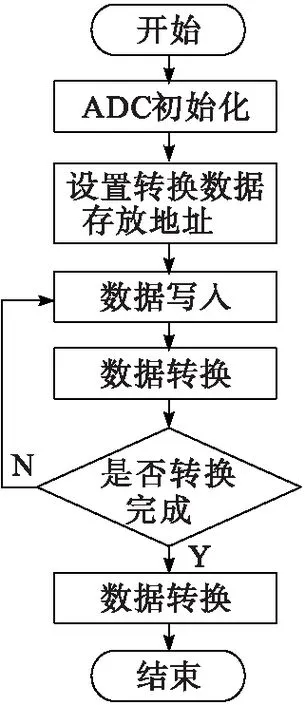
图10 A/D子模块流程图
5 传感器的标定
系统中,采用手动的方式对传感器进行标定,其标定方法是将倾角传感器装配好,并放到水平分度校准台上,注意安装时一定要与水平面相切,不能有倾斜,否则会有偏差影响校准值,该方法是通过串口发送串口命令来进行操作的,为了得到较好的校准值,可以进行多次重复;同时,在标定的过程中要考虑双轴传感器两个轴之间存在的交叉耦合的影响。
由于自身的测量精度是没法改变的,因此,就需要将其他外部影响因素,如焊接误差、安装误差、以及标定过程中产生的这些误差降低到较小值,以保证测量结果的精准性。在系统中,将-30°~+30°的角度范围内,通过采用不同的角度步长对X轴和Y轴的有限个数据点进行标定测验,所得的X轴和Y轴的数据结果如表2所示。
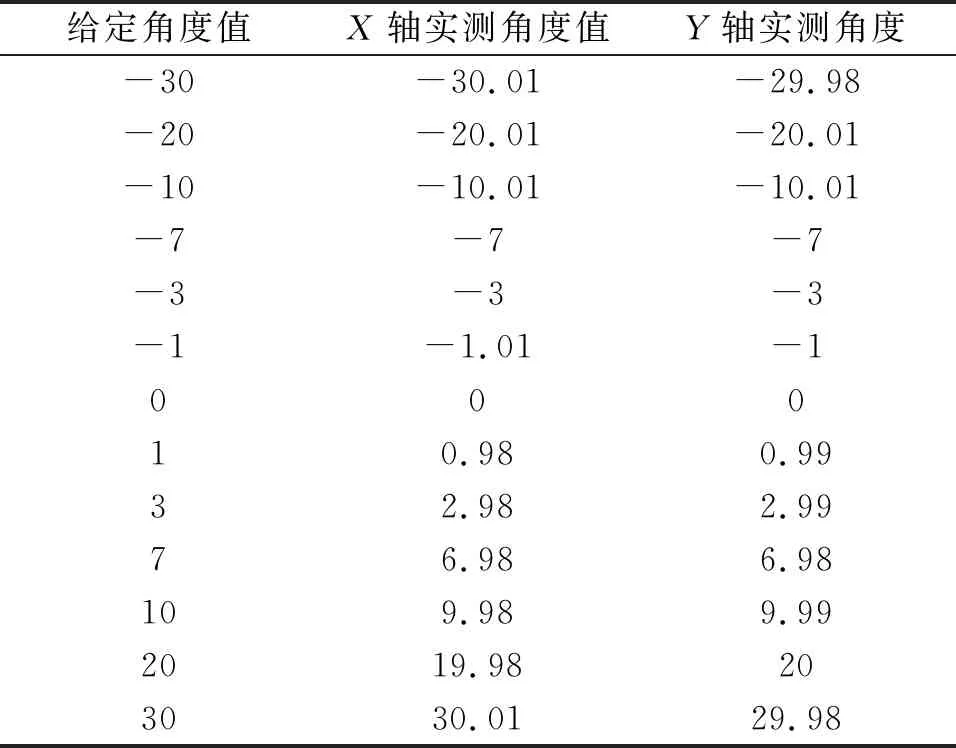
表2 标定结果数据(单位:°)
由表2可知,测量精度满足±2%范围内,将实测角度值与给定角度值之间的关系绘制成曲线图,如下图11和图12所示。

图11 X轴对应曲线图

图12 Y轴对应曲线图
6 结论
论文采用了 SCA100T-D01型加速度计,选用了24 位的A/D 转换器 AD7190 进行采样输出,通过STM32F103微处理器实现倾角传感器的角度换算,,通过标定可得数据精度小于±2%,满足精度设计要求。
猜你喜欢
科学咨询(2020年53期)2020-03-19 07:41:46
商品与质量(2019年22期)2019-11-29 02:41:40
科学导报·学术(2019年44期)2019-09-10 22:25:45
机电工程技术(2018年6期)2018-08-03 01:49:50
电子技术与软件工程(2018年20期)2018-02-28 02:31:28
制造技术与机床(2017年8期)2017-11-27 02:10:12
凿岩机械气动工具(2017年3期)2017-11-22 07:21:29
照明工程学报(2016年3期)2016-06-01 12:18:01
中国惯性技术学报(2015年1期)2015-12-19 13:12:14
焊接(2015年9期)2015-07-18 11:03:52
