基于融合算法的车牌识别系统
2022-08-12 03:35:32王海峰
山西电子技术 2022年4期
王海峰
(山西省信息产业技术研究院有限公司,山西 太原 030012)
0 引言
近些年来,伴随着我国国民收入水平和整体综合实力的提高,机动车辆以每年10%~20%的速度迅速增长,道路智能化建设步伐加快,全国城市化水平也在不断提高,道路交通现状和需求的矛盾进一步加剧,特别是像肇事逃逸、盗抢机动车辆、车辆违章行驶等案件。
基于融合算法的车牌识别系统通过对车辆进行图片抓拍、车牌号码识别、车身颜色识别等数据进行采集分析,实现对机动车辆的构成、车流量分析,违法违章等情况进行24小时不间断记录,为有效快速侦破交通事故逃逸和机动车盗抢、快速处理交通违章行为提供技术支持和有力证据,在城市治安管理和交通管制过程中发挥重要作用。
1 车牌识别系统图像处理技术
1.1 图像灰度化
前端相机采集到的车辆图像一般都是彩色图像,虽然它包含很多的图片颜色信息,但是缺点是占用的存储量比较大,影响系统处理的速度。本系统处理图像信息时需要将彩色图像转为灰度图像,即图像灰度化[1]。一般将24位真彩图像转为灰度图像主要有三种计算方法,即平均值法、最大值法、加权平均值法。本系统采用的是加权平均值法,即灰度化图像灰度值等于RGB图像三个分量的加权平均值,Ii,j=0.299Ri,j+0.578Gi,j+0.114Bi,j。
1.2 图像增强
采用图像增强技术是为了改善视觉效果,增强系统对图像的进一步分析。凸显出图像中有用的信息,减弱或者去除干扰信息,使经过处理后的图像更加适用于车辆识别分析。
1.3 图像二值化
图像二值化是将前景与背景区域进行分离的过程。图像二值化的过程相当于图像阈值分割,首先将像素点的灰度值设定为0或255,然后依据设定的阈值进行分类,确定当前像素是前景区域还是背景区域,也就是将图像呈现出黑白效果的过程,最终实现将图像转为只有两个灰度级的二值化图像。二值化后的图像,数据量大大减少,从而起到凸显出目标位置轮廓的作用。
1.4 边缘检测
边缘是指其周围像素灰度值急剧变化的像素集合,它是图像具有的最基本特征。由于边缘存在于背景、目标和区域之间,所以它是图像分割最重要的依据,同时边缘也是位置的象征,对图像灰度的变化不敏感,所以边缘也是图像匹配重要的特征。
图像分割主要有边缘检测和区域划分两种方法,图像边缘检测,通过提取图像中不连续部分的特征,然后根据形成的闭合边缘确定区域。图像区域划分,则是通过把图像分割成特征相同的区域,不同特征区域之间的边界就是边缘[2]。
边缘检测的主要目的是标注图像中亮度变化明显的像素点,而通常图像属性的显著变化则反映属性的重要变化[3]。在本系统中,由于车牌底色与车牌字符有显著的灰度变化,图像的边缘是通过灰度不连续性来显现的,所以机动车车牌有着较为明显的图像边缘信息,本系统采用边缘检测方法使车牌区域从整幅图像中凸现出来。
1.5 形态学处理
数学形态学是一门建立在格论和拓扑学基础之上的图像分析学科,是数学形态学图像处理的基本理论。数学形态学可以分为二值形态学和灰度形态学,灰度形态学是由二值形态学延伸而来的。
数学形态学包括膨胀和腐蚀两个最基本的运算,而膨胀和腐蚀通过不同的组合又形成了闭运算和开运算[4]。腐蚀运算过程使目标区域信息范围“缩小”,实质是造成图像的边界收缩,通过腐蚀运算过程可以消除目标区域没有价值的信息;而相反,膨胀运算过程会使目标区域信息范围“扩大”,将与目标区域接触的背景像素点合并到该目标区域中,使得目标区域边界向外扩张,膨胀的作用就是用来填补目标区域的空洞点以及消除噪声颗粒。由于二值化后的图像中含有较多的噪声孤立点,是不利于进一步图像特征提取,所以本系统采用了开运算方式,即先腐蚀再膨胀的过程,可以有效地去除图像中的孤立点。
2 结论
车牌号码是机动车辆重要的身份证明,在车辆识别优先级方面,一般将车牌号码识别设定为最高优先级,当机动车车牌比较清晰时,可以正确的识别出车牌号码,从而准确的确定车辆的身份,而当车牌被遮挡或缺损时,车牌号码无法被准确识别出来时,本系统可以进一步进行车标、车身颜色识别,通过查询比对数据库中与此车标信息相对应的车牌号码,系统自动筛选出最接近的车牌号码,从而确定出车辆的正确信息。本文所提出的基于融合算法的车牌识别系统,实时采集车辆的多种特征信息,包括车牌号码、车辆标志、车身颜色等信息,利用同一车辆不同信息之间的相互印证,通过优化的识别算法准确的识别出车辆的信息。
在系统测试阶段,共对200个样本进行测试,测试结果如表1。
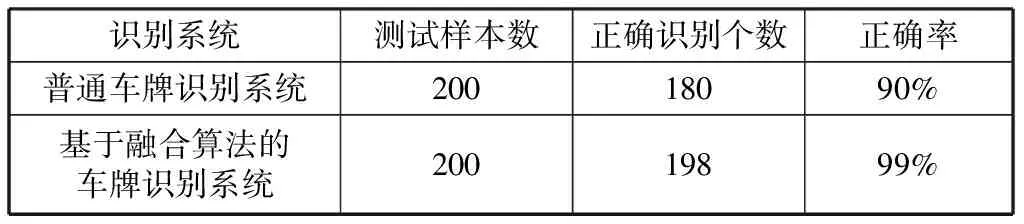
表1 测试结果
从测试数据可以看出,基于融合算法的车牌识别系统识别正确率远远高于普通车牌识别系统。由于普通车牌识别系统仅仅依靠单一的车牌号码进行车辆识别,识别结果往往受很多外在因素影响,无法根本解决车辆遮挡号牌、套牌、无牌的疑难问题,针对这一现状,本文提出的基于融合算法的车辆识别系统,采用信息融合的方法,利用车辆不同信息之间的互补性,将车标、车身颜色等特征信息作为车辆识别的其他识别手段,通过融合多种车辆信息准确识别出车辆身份信息,能够很好的解决车牌遮挡、套牌、污损、缺失等情况下,无法准确识别车辆的疑难问题。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 02:00:02
高技术通讯(2021年3期)2021-06-09 06:57:48
电子制作(2019年12期)2019-07-16 08:45:16
小猕猴智力画刊(2017年5期)2017-05-25 21:44:09
自动化学报(2017年5期)2017-05-14 06:20:56
电子制作(2017年22期)2017-02-02 07:10:11
光学精密工程(2016年1期)2016-11-07 09:01:59
中国继续医学教育(2015年2期)2016-01-06 01:36:16
振动、测试与诊断(2014年6期)2014-03-01 01:14:50
现代检验医学杂志(2014年1期)2014-02-06 01:29:31