
Sondex爬行器缆头张力磁定位短节的研制
2022-08-11 01:06赵燕
石油管材与仪器 2022年4期
赵 燕
(中石化经纬有限公司中原测控公司 河南 濮阳 457001)
0 引 言
随着油田水平井数量的增多,目前用于水平井动态监测的仪器输送方式有3种:连续油管输送、钻杆输送和爬行器输送。爬行器因经济、便捷越来越被广泛应用。目前使用的Sondex爬行器,其缆头张力磁定位短节有外焊接点,易锈蚀渗水,且该结构焊接工艺复杂,仪器使用寿命短;此外,高温下张力输出值偏移也较大。因此,急需重新研制新结构的缆头张力磁定位短节。
1 缆头张力磁定位短节的研制
缆头张力磁定位短节有两个测量参数:磁定位和缆头张力。磁定位用于测量接箍信号,判别爬行器运行状态,同时计算爬行距离;缆头张力提供实时缆头张力监测,主要用于水平井遇阻遇卡的判断。
1.1 电路设计
缆头张力磁定位短节与电子线路短节通过多芯插针连接,由电子线路短节提供+12 V张力测量电源[1],张力信号经过减法运算、分频处理后送到电子线路短节中;而磁定位信号是通过多芯插针直接接入电子线路短节进行压频转换,不在该线路中处理。
张力测量采用位移传感器,缆头轴向力作用在短节内部弹簧上,或压缩或拉伸,带动支撑于弹簧上的铁芯在线圈内运动,改变振荡电路频率输出,上传至检测面板显示出拉力值的变化。
拉力探头采用的是单线圈式螺管型电感传感器,在螺管内插入铁芯,铁芯插入的长度会改变线圈内电感量的大小,其计算公式如下:
(1)
式(1)中:u0为线圈磁导率,mH/mm;N为线圈匝数;l为线圈长度,mm;rc为铁芯半径,mm;um为铁芯磁导率mH/mm;Δlc为铁芯位移量,mm。
1.1.1 电路工作原理
缆头张力磁定位短节电路原理如图1所示。张力线圈与施密特反相器CD40106、电阻电容构成振荡电路,改变线圈的电感量即是改变振荡电路的输出频率。在线路中使用两个完全相同的振荡电路,线圈内有铁芯的称为有源线圈,无铁芯的称为无源线圈[2],无源线圈构成的振荡电路输出频率减去有源线圈构成的振荡电路输出频率,实现温度补偿,即无源振荡电路起到了温度补偿作用。输出结果再通过分频器分频输出一个合适频率值。
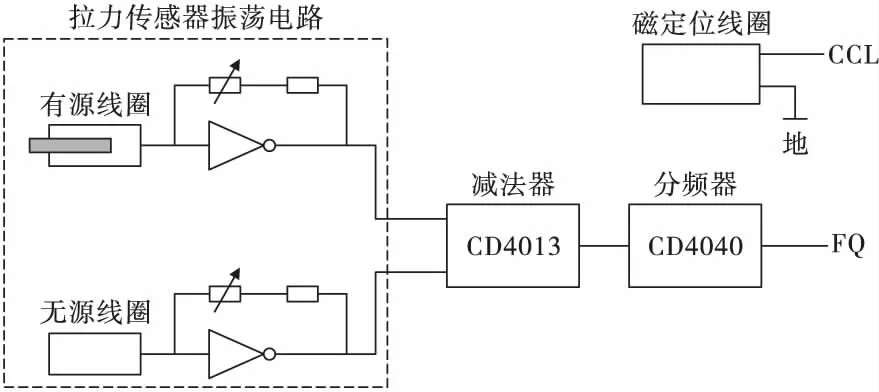
图1 缆头张力磁定位短节电路原理框图
在不安装铁芯时,将两个振荡电路调试成输出频率完全相同的振荡电路,即输出频率均为32.5 kHz,再将铁芯放置在合适位置,使有源线圈输出频率为24.8 kHz,然后将两组输出频率同时输入到D触发器CD4013内进行减法运算输出频率8 kHz,再输入CD4040进行16分频,输出FQ为481 Hz。
线路中,将无缘振荡电路输出信号接到CD4013的CP端,作为时钟信号,有源振荡输出频率接到D端口,实现减法器的功能,输出真值见表1。

表1 CD4013输出真值表
1.1.2 标定试验
标定试验反映了振荡电路在不同温度下测出的输出频率数据,将电感传感器和电路放置在烘箱内,改变烘箱温度,以30 ℃为间隔,待温度稳定后记录输出频率值,结果见表2。表2中,F1为有源振荡电路输出频率值,F2为无源振荡电路输出频率值,FQ为两者差值分频后频率值。
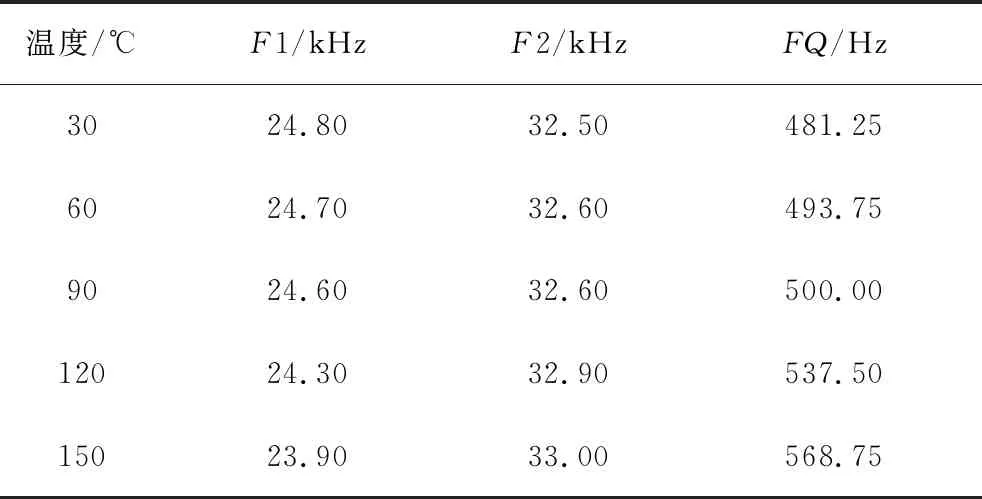
表2 输出频率试验结果
由表2可见,频率输出曲线随着温度的增加变化近100 Hz,出现严重的温度漂移,需在电路中做温度补偿。
根据试验数据绘制输出频率随温度变化的输出曲线,如图2所示。
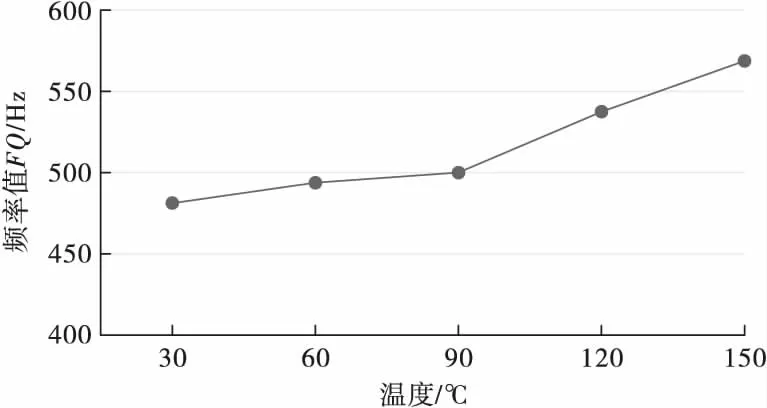
图2 输出频率试验结果曲线图
1.1.3 温度补偿
根据标定数据分析,有源振荡电路频率会随着温度的升高而降低,是造成温漂严重的原因,所以在有源振荡电路中增加热敏电阻PT1000,降低温度漂移对频率值的影响。温度补偿电路如图3所示。
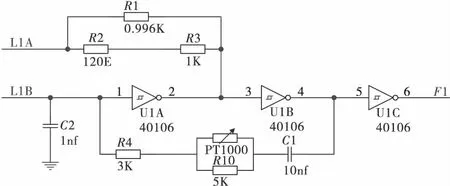
图3 温度补偿电路图
增加温度补偿后的输出频率值见表3。
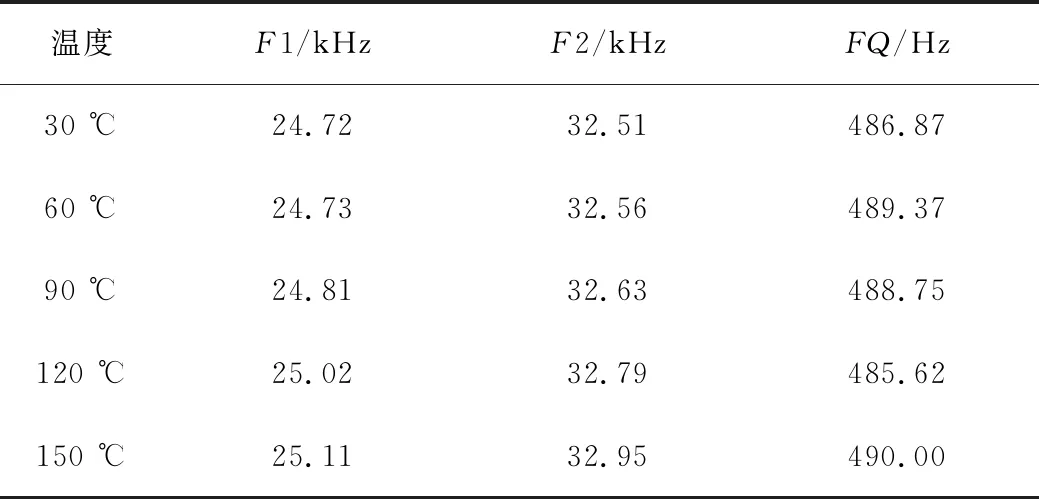
表3 温度补偿后输出频率试验结果
由表3可见,补偿后的数据频率随着温度的增加频率变化小于10 Hz。补偿后的输出曲线如图4所示。
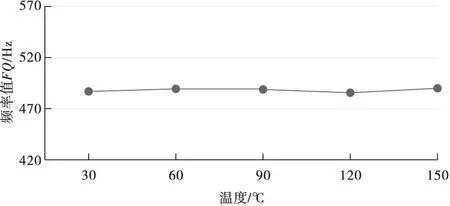
图4 温度补偿后输出频率曲线图
1.2 结构设计与改进
1.2.1 仪器结构设计
缆头张力磁定位短节由张力探头、磁定位探头和线路板组成。仪器的机械结构如图5所示。
磁定位探头由线圈和磁钢组成,线圈阻值为2.3 kΩ。
张力探头由张力线圈、铁芯和弹簧组成。弹簧在压缩过程中,下端被顶起,上端保持固定[2],支撑于弹簧上的轴带动铁芯向下移动;弹簧在拉伸过程中,上端被顶起,下端保证固定,铁芯会向上移动,铁芯的上下运动使得张力线圈电感量发生变化,从而改变输出频率。

图5 新研制的缆头张力磁定位短节机械结构图
1)弹簧
在实验室做拉力与FQ频率输出关系的实验和频率与铁芯移动量的实验,根据计划拉伸的工作量程,最终决定使用强度为27 kg/mm的弹簧,同时根据选择的材料、设计的弹簧直径和弹簧线径,使用弹簧强度系数经验公式[3],计算出弹簧的有效圈数。计算公式如下:
(2)
式(2)中:K为弹簧刚度系数,kg/mm;G为材料剪切弹性模量,MPa;d为簧丝线径,mm;D为中心直径,mm;n为弹簧有效圈数。
已知弹簧刚度系数和弹簧最大自由长度变形量28 mm,根据负荷计算公式[3],可算出弹簧最大负荷量约为740 kg,探头中使用两个相同的弹簧,最大负荷量×2,完全满足拉伸在1 000 kg的工作量程。
P=K×F
(3)
式(3)中:P为最大负荷量,kg;K为弹簧刚度系数,kg/mm;F为弹簧最大自由长度变形量,mm。
实际工作中,随着温度的升高,弹簧的剪切弹性模量降低,承载能力变小。剪切弹性模量修正公式[3]如下:
Gt=Kt×G
(4)
式(4)中:G为常温下剪切弹性模量,MPa;Kt为温度修正系数;Gt为工作温度下的剪切弹性模量,MPa。
经过计算可以得出工作时弹簧最大负荷量Pt与温度修正系数的关系,即:Pt=Kt×P。仪器内弹簧使用的是硅锰弹簧钢,在150 ℃时温度修正系数为0.99,误差为1%。在爬行器工作中起到指示作用的张力参数精确度要求不高,所以温度对弹簧弹力的影响可以忽略不计。
2)铁芯
铁芯采用铁氧体磁性材料,具有磁导率高、电阻率高和涡流损耗小等特点[4]。
3)张力线圈
根据负载阻抗的要求,采用Φ0.08 mm的铜线绕制成阻值为3 kΩ、电感为20 mH的线圈。
1.2.2 仪器总线过线方式的改进
原进口缆头张力磁定位短节的总线是通过承压管外焊接在骨架上的。因有焊接点,多次使用后易锈蚀、易渗水,并且焊接工艺复杂,使用寿命短。原机械结构如图6所示。
新结构的缆头张力磁定位短节总线采用了内置的方式(见图5中总线位置),从根本上解决了由于焊接点锈蚀造成的渗水问题,而且仪器结构简单。

图6 原进口缆头张力磁定位短节机械结构图
2 缆头张力磁定位短节的应用
爬行器在井内爬行过程中,需要对缆头张力和磁定位进行实时监测。爬行器下放过程一般分为4个阶段[5]:
1)井斜为0°时,缆头张力不变;
2)弯曲段时,仪器下放至受阻后,缆头张力逐渐减小至零;
3)此时唤醒爬行器,撑开爬行轮输送仪器,缆头张力值开始增加,说明松弛电缆被拉直;
4)水平段时,调整电缆下放速度,调整到地面缆头张力稳定,使得爬行器爬行速度和电缆下放速度同步。
图7为某井爬行器曲线回放,随着井斜的增加,爬行器的负载也在缓慢地增加,并且电缆阻力也在增大。电缆张力就是对电缆阻力的直接测量。图7中红色曲线为张力曲线,蓝色为爬行器负载功率指示曲线。
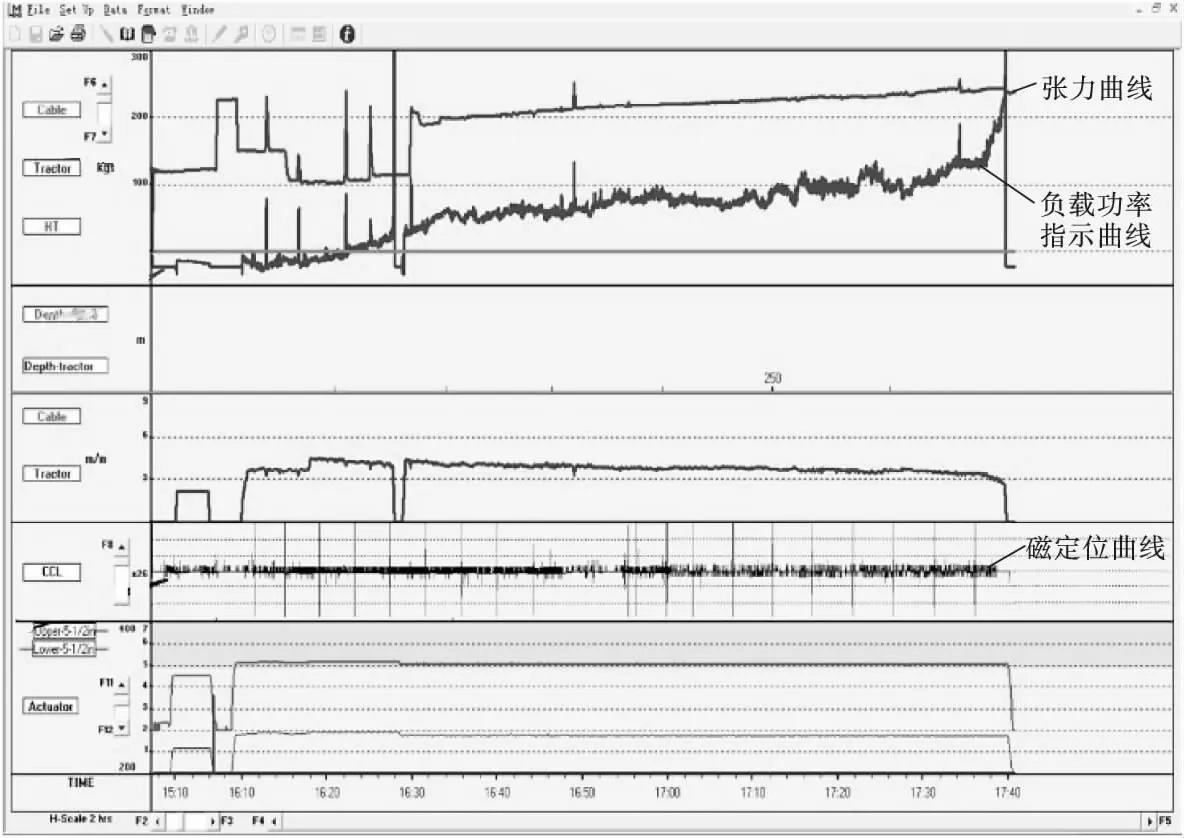
图7 某井爬行器回放曲线图
从图7可以看出,张力值较为稳定,随着爬行距离的增加,缓慢增大,负载功率指示曲线和张力曲线趋势一致,同步性好。黑色为磁定位信号,接箍信号明显,能准确计算爬行距离,确定仪器位置。
3 结 论
本文介绍了新研制的缆头张力磁定位短节的电路和机械结构设计。通过在电路中增加温度补偿,解决了温漂对拉力输出频率的影响;通过重新设计仪器结构,改变仪器总线过线方式,降低了渗水风险。新研制的缆头张力磁定位短节在实际应用中为爬行器安全输送仪器提供了有力保障。
猜你喜欢
科技风(2022年34期)2022-12-14
大电机技术(2022年4期)2022-08-30
橡塑技术与装备(2022年8期)2022-08-05
少儿科技(2022年4期)2022-04-14
马克思主义哲学研究(2021年2期)2021-06-05
新世纪智能(高一语文)(2020年9期)2021-01-04
砖瓦世界·下半月(2020年6期)2020-10-20
模具制造(2019年7期)2019-09-25
中华诗词(2018年4期)2018-08-17
汽车维护与修理(2015年6期)2015-02-28
