
基于数字摄影测量的火炮质心高度测量方法
2022-08-10 03:37:46崔爱莲关士成孙科杰凌山珊
兵器装备工程学报 2022年7期
崔爱莲,关士成,金 毅,孙科杰,凌山珊
(1.中国人民解放军63853部队, 吉林 白城 137001; 2.中国人民解放军63861部队, 吉林 白城 137001)
1 引言
火炮质心位置是火炮重要性能参数之一,与火炮的行驶安全性、射击稳定性密切相关,对火炮的整体设计和布局有着重要影响,其中质心高度测量是质心位置测量的难点。
现有的质心测量方法主要有平台支反力法、吊起法、悬挂法、摇摆法。平台支反力法需用专用设备,投资大,普及率低;吊起法由于角度变化较小,质量反应引起的轴荷也较小,所带来的误差较大;悬挂法需要的设备较少,但是涉及悬挂后进行量尺寸等工作,存在难以计算出质心的问题; 摇摆法所需设备复杂,不太适用于质量大、体积大的物体,其应用受到限制。
数字摄影测量技术运用多学科的理论与方法,如计算机技术、图像处理、模式识别等,对被测物体图像进行处理得到目标的空间三维坐标,进而完成对物体的形状、位置、姿态等的测量。数字摄影测量技术具有三维测量精度高、自动化程度高等特点。
基于上述分析,本研究中提出了一种基于数字摄影测量技术的质心高度测量方法。该方法将悬挂法和数字摄影测量技术结合,利用悬挂法原理和数字摄影测量技术的高精度三维测量特点,进行质心高度测量。
2 数字摄影测量系统构成及作业流程
本研究中采用的数字摄影测量系统是通过一台高分辨率数码相机对被测目标进行拍摄,获取目标的准二值数字图像,对获取的图像进行处理后得到精确的空间三维坐标。
2.1 系统构造
数字摄影测量系统由一台高精度专业测量相机、摄影测量人工标志、一把基准尺、一台计算机和一套测量软件组成。
1) 高精度专业测量相机,专业测量相机由普通数码相机经过高精度标定被封装起来用于高精度的三维测量。
2) 人工标志,在数字摄影测量中,物体本身的特征不足,需在被测目标上增加人工标志作为测量的特征点来完成测量过程,以进行高精度的测量和空间描述。
人工标志采用回光反射材料制作,可拍摄出背景环境暗淡、标志特征点清晰的“准二值图像”,可以有效地与背景环境相区别。
本文中使用的人工标志分为测量标志和编码标志。测量标志作为被测目标成像点,可提高测量精度、可靠性和测量效率。编码标志带有数字编码信息,能够实现对编码标志的准确识别、定位和图像的拼接。
3) 高精度基准尺,基准尺的两端各固定一个人工标志点,测量前已标定2个标志点间的距离,在测量过程中提供长度基准。
4) 数据处理软件,软件主要功能模块包括像点精确定位、编码标志识别及定位、图像匹配及拼接、光束法平差、结果分析以及图形显示等。
2.2 系统作业流程
数字摄影测量系统作业流程如图1所示。该系统采用专业测量相机,在不同的位置和方向拍摄目标图像,经标志识别与中心定位、图像匹配、光束法平差后得到目标标志点三维坐标。
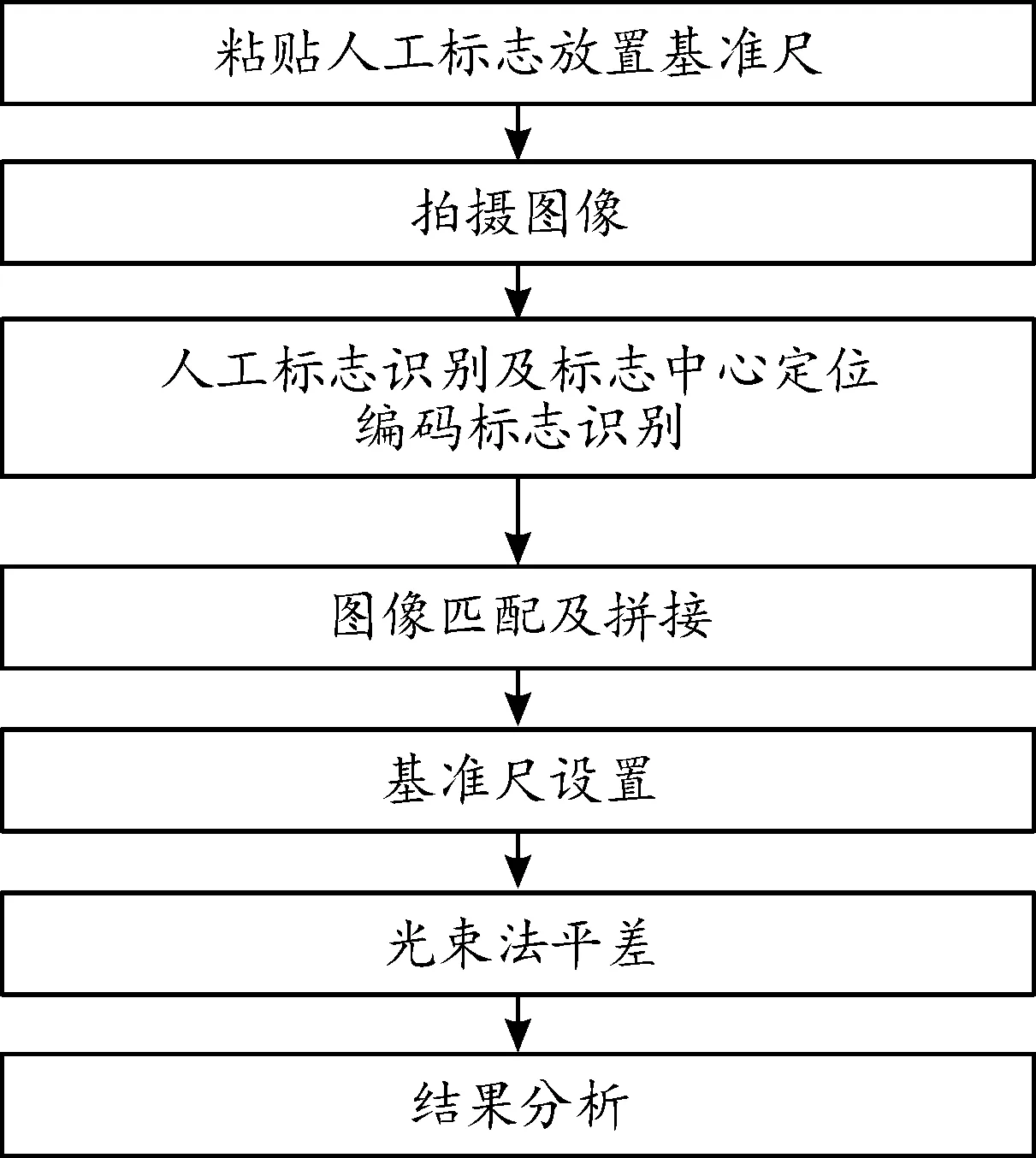
图1 数字摄影测量系统作业流程框图
1) 人工标志识别与标志中心高精度定位
本研究中使用圆形人工标志,因此被测目标空间三维坐标实际上就是圆形人工标志中心坐标。在图像拍摄中,圆形标志点所成的像会发生一定的偏移形成椭圆,圆形标志中心即为椭圆图像中心。椭圆中心定位过程有:提取椭圆图像边缘,根据图像边缘对标志图像进行判断和识别,最后进行最小二乘拟合确定标志中心的精确位置。
a) 图像边缘检测
采用Canny算子进行边缘检测,Canny算子产生单像素边缘,对噪声不敏感,适合提取椭圆形边缘。
b) 圆形标志识别
经过Canny算子处理后的图像含有虚假边缘和非标志边缘,需要对边缘和边缘内的像素进行判断,从而实现对圆形标志的识别。通过几何条件,如尺寸、边缘像素数(周长)、形状因子(圆形度)来检验图形是否符合标志图像标准。
c) 人工标志图像中心高精度定位
采用最小二乘椭圆拟合方法,利用标志图像边缘点的坐标求出椭圆5个参数,计算出椭圆中心坐标。椭圆方程表达式为:
+2++2+2+1=0
(1)
可利用最小二乘椭圆拟合求得椭圆方程的系数、、、、。

(2)
式(2)中,(,)为拟合椭圆中心坐标。
2) 编码标志识别
研究中采用的编码标志是点状编码标志,点状编码标志识别可以看作两幅图像中点集的匹配问题。编码标志中固定几个点为编码标志的设计模板点,识别方法是在图像中找到模板点的图像点,通过仿射变换把图像中的点恢复到设计坐标系下,求出仿射变换参数;然后利用仿射变换参数恢复模板点周围的编码点的其他像点;最后与设计坐标相比较,对编码点进行解码得到编码标志的编码。
3) 图像匹配
使用具有规则形状的人工标志点,在图像匹配之前对其像点进行了精确定位,图像匹配只需要确定同名像点(即同一标志点在不同像片上的像点)即可。针对数字摄影测量的特点,文中使用的方法是基于核线约束条件的匹配。
核线原理可知,如果知道一张图像上某个物方点的像点,那么在其他图像中该像点的对应像点必在其对应的核线上。如果己知图像方向参数的准确值或近似值,则对应核线就可以计算出来,像点匹配范围就由二维匹配转化为一维匹配。
图2为多摄站对应核线示意图,其中、和为各摄站镜头光学中心,、和为像平面,、和为像主点,′、″和‴为物方点的对应像点,和为像点′在和上的对应核线。

图2 多摄站对应核线示意图
4) 自检校光束法平差
确定出不同像片上的同名像点后利用光束法平差就可以解算出物方点精确坐标。光束平差法是以每条光束为基本单元,以像点坐标为观测值,由共线方程列出基本误差方程,在整个区域进行平差处理,对相机内外参数、空间点坐标等进行优化求解的过程。
3 火炮质心高度求解过程
根据在完全起吊并静止的情况下,起吊物的质心必然通过起吊点垂线的悬挂法原理,结合数字摄影测量技术测量质心高度位置。
采用不同悬挂长度的吊锁对火炮沿横向轴旋转不同角度起吊的情况下,通过数字摄影测量技术获取在火炮坐标系下的铅锤线上测量标志空间坐标,根据所得到的空间点坐标拟合得到铅垂线方程,最后联立各条铅垂线直线方程,求解得到火炮质心高度位置。
1) 在火炮表面粘贴测量标志和编码标志,放置基准尺。
2) 建立火炮的坐标原点和坐标系。坐标原点确定在右后车轮中心;轴线(横坐标):通过原点,垂直于右前车轮轴心线的水平直线,指向前方;轴线(纵坐标):通过原点,确定在后车轮轴心线,面对行驶方向指向右方;轴线(高度坐标):通过原点,垂直水平面的直线,指向上方;质心位置表示为,如图3所示。
3) 火炮悬吊。在悬吊点处挂上一根粘贴5个测量标志的铅垂线,这条线就是火炮的吊点垂线。保持悬吊点的空间位置不变,改变悬吊角度。在不同的悬吊角度下拍摄火炮和铅垂线上标志点图像。图3表示2种不同悬吊姿态下的火炮状态。

图3 火炮悬吊姿态示意图
4) 铅垂线拟合。每一次悬吊完成后,用专业相机从不同的角度和位置对火炮及铅垂线进行拍摄,对获取的图像进行处理,解算出各标志点在火炮坐标系下的空间坐标。获取铅垂线上粘贴的5个测量标志点三维空间坐标后,采用最小二乘法拟合成一条空间直线。
5) 质心高度计算。获取不同悬吊角度下铅垂线空间直线后,利用所有铅垂线都会相交于火炮质心原理,联立两条铅垂线空间直线方程,求解得到火炮的质心高度坐标,如图4所示。

图4 火炮坐标系下标志点状态示意图
4 试验验证
本文中以某型高炮为例进行试验验证。首先要完成人工标志的粘贴,包括铅垂线上的5个测量标志点,尽可能使铅垂线上的标志点中心在同一条直线上并且使这条直线与铅垂线平行。然后是坐标系的定义,目标坐标系的建立原则要符合国军标规定且标志点的空间三维坐标易于读取。
整个试验过程中,保持火炮悬吊后静止不动,减少外界环境对火炮的扰动,以保证成像清晰度和测量精度。
4.1 参数设定
1) 测量相机
使用尼康D810数码相机,相机分辨率为7 360pixels×4 912pixels,每个像素尺寸为4.9 μm。镜头参数已事先在实验室进行标定,摄影时使用环形闪光灯作为外部光源,并进行封装。
2) 尺度基准
在测量中使用两端具有圆形回光反射标志、距离已进行精确标定的基准尺作为基准尺度。基准尺长度为600 mm,标定精度为0.003 mm。
2.2.2 NIHSS 评分 纳入研究中 11 篇[3,8‐9,12,14‐18,20‐21]报道了溶栓前后NIHSS评分变化情况,各研究间无异质性(P=0.29,I2=16%),采用固定效应模型进行Meta‐分析(图2)。结果显示标准剂量组溶栓后NIHSS评分减少值大于低剂量组,差异有统计学意义(SMD=0.27,95%CI=0.14~0.40,P<0.001)。
3) 摄站布设
由于现场空间条件的限制以及火炮尺寸大等原因,火炮整个表面不能在相机里完全成像,每张图像只能采集到的火炮的一面或一部分,需要通过编码标志来实现对所有测量图像的拼接。分别从不同位置和方向拍摄火炮图像200余张,每张图像之间的重叠度保持在80%以上。
4.2 试验结果
通过测量相机对悬吊后的火炮进行图像信息采集,得到铅垂线上测量标志点在相机中的图像信息图如图5。

图5 铅垂线标志点图像信息图
测量质心高度坐标需要2个悬吊姿态下的标志点坐标,标志点在火炮坐标系下测量得到的坐标值见表1所示。
根据最小二乘原理,对2种不同悬吊姿态下的铅垂线标志点坐标值进行空间直线拟合,具体结果见图6所示。
4.3 试验结果比对分析
根据工程实践经验可得,平台支反力法所测量质心高度精度能够保持在10 mm以内。因此,将平台支反力法的试验结果作为质心高度坐标的参考值进行比对。2种试验方法得到的测量结果如表2所示。

表1 铅垂线标志点在火炮坐标系下的坐标值

图6 铅垂线空间拟合图

表2 测量结果
从表2可以看出,火炮的质心高度坐标误差在13 mm左右,误差的主要来源如下:
1) 由于吊钩、吊具本身的质量引起的误差。火炮起吊后,摄影测量方法所求出的质心高度是起吊物包括高炮、吊钩、吊具的整体质心高度,在今后的试验中加以研究。
2) 铅垂线上测量标志引起的测量误差。铅垂线直径为20 mm,测量标志是粘贴在铅垂线表面上的,拟合直线与铅垂线的中心线有一定的误差,也需在今后的试验中加以研究。
3) 相机采样误差。该误差在毫米级以内,可忽略不计。
4) 外界环境对目标和铅垂线特征点的扰动所造成的误差。
以上试验结果验证了本研究中方法的合理性和算法的有效性,为火炮的侧翻角和射击极限稳定角的计算保证了精度要求。
5 结论
提出了基于数字摄影测量技术的火炮质心高度测量方法。该方法根据悬挂法原理,结合数字摄影测量技术,在不同的悬吊角度吊起火炮进行火炮质心高度测量。
1) 悬挂法需要的设备较少,不需要质心测量平台、地中衡等专用测量设备,但是难以测量悬挂后的火炮尺寸。数字摄影测量技术可通过对获取的被测目标图像进行处理后得到精确的空间三维坐标,并利用空间三维坐标解算质心高度,不需要人为地测量尺寸。因此文中方法能够很好地解决以往质心高度测量中测量设备及测量参数过多的问题,对配有起吊装置的火炮及装备较为合适。
2) 文中方法与传统方法对比,在自动化程度上明显占优。与平台支反力法进行比较,通过误差分析,验证了本文方法的合理性和可行性,满足测量精度要求,是质心高度测量方法有意义的探索,有着较高的实用价值。
3) 文中方法还存在吊钩、吊具本身的质量和铅垂线上测量标志等引起的测量误差,在后续过程需要不断研究、优化和改进。
猜你喜欢
计算机测量与控制(2024年2期)2024-02-29 04:22:22
汽车实用技术(2022年14期)2022-07-30 06:24:26
北京航空航天大学学报(2021年4期)2021-11-24 01:13:12
小哥白尼(军事科学)(2020年2期)2020-06-16 03:11:04
测控技术(2018年12期)2018-11-25 09:37:20
传感器与微系统(2018年7期)2018-08-29 00:44:24
计算机工程与设计(2014年9期)2014-12-23 01:16:00
航天器工程(2014年5期)2014-03-11 16:35:53
物理与工程(2010年1期)2010-03-25 10:01:48
小哥白尼·趣味科学画报(2006年8期)2006-03-18 07:41:12
