山地履带拖拉机坡地等高线作业土壤压实应力研究
2022-08-08 08:29孙景彬褚宏丽雒鹏鑫杨福增刘志杰
农业机械学报 2022年7期
孙景彬 褚宏丽 刘 琪 雒鹏鑫 杨福增 刘志杰
(1.西北农林科技大学机械与电子工程学院, 陕西杨凌 712100;2.农业农村部北方农业装备科学观测实验站, 陕西杨凌 712100)
0 引言
黄土高原丘陵山区是我国重要农业生产区,属于国家战略“黄河流域生态保护和高质量发展”的中心区域[1],非常适合种植小麦、玉米等粮食作物,因此推进该地区农业的可持续发展对于保障国家粮食安全具有重要意义。近年来,丘陵山区的农业机械化发展取得了一定的成效,然而机械化作业对坡地土壤压实效应也随之产生,这将使土壤容重增加、孔隙度降低,不利于作物根系对水分和养分的吸收[2-4]。履带拖拉机因具有较小的接触比压及较好的越障性能,适宜在该地区作业[5],但是由于坡地角的存在使得拖拉机重心发生偏移,造成两侧履带下方土壤应力分布极不均匀,尤其坡低侧土壤压实程度增大,影响坡耕地土壤质量。因此,深入研究履带车辆对坡地土壤内部应力分布的影响规律,对于揭示坡地土壤压实机理、有效消减压实具有重要意义。
目前,履带车辆对土壤的压实研究主要集中在平地。KELLER等[6]研究了履带压实作用下深度0.3 m范围土壤中垂直应力在履带长度方向变化情况,得出垂直应力分布很不均匀,其最大值约是平均值的3.2倍;LAMANDE等[7-8]分析了同一车辆采用轮式和履带式行走装置情况下对土壤的压实作用,得到履带式作用下深度0.35 m处土壤最大垂直应力仅仅比轮式减小了约20%,并测定了橡胶履带与土壤接触面内垂直应力在履带长度方向的分布规律,在支重轮的轴线处出现峰值;丁肇等[9]通过钻孔埋设传感器的方法研究了履带式行走机构压实作用下土壤应力分布均匀性,为行走结构的优化设计提供理论依据;赵子涵等[10]分析了地面土壤紧实程度和车辆荷载对垂直应力分布的影响,得出紧实地面上支重轮间履带几乎不受力,应力分布为非连续,松软地面上履带应力分布连续,支重轮下应力均匀度随荷载增大而升高。栗浩展等[11]分析了金属履带行走系对土壤内垂直应力的影响规律,得出垂直应力在履带长度方向的分布形状近似三角形,支重轮轴线位置出现最大应力。
综上所述,目前有关履带车辆对土壤压实的研究涉及的工况均为平地,主要包括拖拉机参数、履带参数、土壤参数等对土壤内部垂直、水平应力分布均匀性影响规律的探究,然而对坡地工况下土壤内部应力传递规律研究尚未报道。因此,本文针对黄土高原丘陵山区典型等高线坡地工况,拟通过理论分析、EDEM-RecurDyn耦合仿真试验、土槽及实地试验相结合的方法探究山地履带拖拉机坡地等高线行驶/作业工况下,履带下方土壤内部应力分布的规律,以期为有效消减坡地农田土壤压实效应提供理论参考。
1 履带最大接地比压与应力传递理论
1.1 履带最大接地比压
履带平均接地比压是平地工况下履带对土壤压实效应平均情况的反映。坡地工况下,拖拉机两侧履带对坡地土壤的压实作用不均匀,因此有必要分析履带行走机构在坡地条件下接地比压的具体变化情况。
当山地拖拉机处于坡地角为α的等高线坡地时,其重心横向偏移会使得坡低侧履带接地比压增大,坡高侧的接地比压减小,加剧坡低侧土壤的压实[12];重心纵向偏移则会影响拖拉机的牵引附着性能和纵向稳定性。参照文献[13-14],履带最大接地比压σmax为平均接地比压σ与载荷横向偏心引起的接地比压σx以及载荷纵向偏心引起的接地比压σy的叠加,即
σmax=σ+σx+σy
(1)
其中
σ=(G0+2G1)/(2Lb)
(2)
σx=kMx/(BLb)=kG0ecosα/(BLb)
(3)
k=1+b/B
(4)
式中G0——山地拖拉机车身的重力,N
G1——山地拖拉机履带行走系的重力,N
L——履带接地长度,mm
b——履带宽度,mm
k——履带宽度方向压力修正系数
Mx——横向偏心引起的偏心力矩,N·m
B——山地拖拉机轨距,mm
e——重心横向偏移量,mm
由式(3)可知,在土壤参数、拖拉机参数一定的情况下,山地拖拉机在坡地工况下载荷横向偏心引起的接地比压σx与坡地角α紧密相关。
另外,载荷纵向偏心引起的接地比压σy受山地拖拉机纵向偏心距的影响,计算式为
(5)
式中My——纵向偏心引起的偏心力矩,N·m
e′——山地拖拉机的纵向偏心距,mm
山地拖拉机在丘陵山区坡地行驶和作业时,极易出现纵向障碍物(田埂、水沟等),这就对山地拖拉机的纵向稳定性提出更高的要求,因此载荷纵向偏心引起的接地比压应按照式中e′>L/6的工况计算。并且,坡地等高线作业过程中,地表的不平度易使作业耕深发生突变,从而引起载荷的纵向偏心,导致纵向接地比压的变化,最终影响到拖拉机的牵引附着性能,因此在进行山地履带拖拉机行走系设计时亦应充分考虑纵向接地比压。
1.2 履带应力传递理论
土壤应力传递模型的发展主要是基于Boussinesq方程,提出在均匀弹性体为介质条件下应力的传递规律[15]。其中,山地履带拖拉机与坡地土壤互作过程中应力的传递分两个阶段:①履带与土壤互作过程在土壤表面产生接触应力。②接触应力在土壤内部进行传递[16-17]。目前,履带与土壤接触应力模型分析主要参考KELLER等[16]于2016年首次建立的模型,该模型可以根据履带参数(接地长度、宽度、轴载、支重轮直径等)来预测履带与土壤接触面的应力分布情况。基于Boussinesq应力传递方程推导的SoilFlex传递模型是系统定量土壤内部应力的模型之一,然后根据Söhne所建立的应力叠加方程计算土壤内部任意点的应力,受力分析如图1所示。图中,Ai为接触面A上任意划分单元;Pi为作用在单元Ai上的垂直载荷,N;Hi为作用在单元Ai上的切向载荷,N;S为接触面下方土壤内的任意点;r为点Ai与点S之间的距离,m;σr,i为点S沿AiS方向的法向应力,kPa;θ为表面垂直载荷Pi与法向应力σr,i的夹角,(°);δ为切向载荷Hi与法向应力σr,i和z所在平面夹角,(°)。
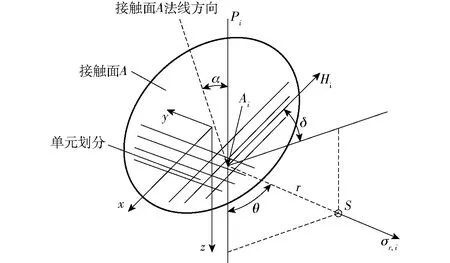
图1 土壤内任意点的受力分析Fig.1 Stress analysis of any point in soil
把接触面A分成i个单元,每个单元Ai上作用垂直载荷Pi和切向载荷Hi,则履带下方土壤内任意点S沿AiS方向的法向应力σr,i为
(6)
式中ξ——集中系数
不同的土壤条件ξ取值不同。根据LAMANDE等[8]的建议,计算履带作用下的应力时取ξ=6。
进而可得土壤内任意点S的垂直应力σz及水平应力σx、σy分别为
(7)
(8)
(9)
可得,坡地角α对履带与坡地土壤接触应力以及土壤内部应力传递均具有一定的影响,该理论可为后续实地试验时土壤应力测量传感器在土层中的埋设布置方式提供一定的参考。
2 坡地土壤压实仿真
为了探究载荷变化对两侧履带下方土壤中不同位置土壤颗粒接触力的影响情况,通过EDEM-RecurDyn耦合的方法进行相关仿真分析。
2.1 履带-坡地土壤模型建立
基于SolidWorks建立2条橡胶履带(宽度230 mm,接地长度为1 410 mm)以及山地拖拉机车架简化的三维结构模型,保存为.x_t文件,将该文件导入到RecurDyn多体动力学仿真软件中,然后基于EDEM-RecurDyn耦合的方法对履带-坡地土壤相互作用过程进行仿真模拟。构建的坡地土壤压实仿真模型如图2a所示,模型尺寸为:长1 500 mm、宽1 400 mm、等高线坡度为15°,耦合仿真过程如图2b所示。
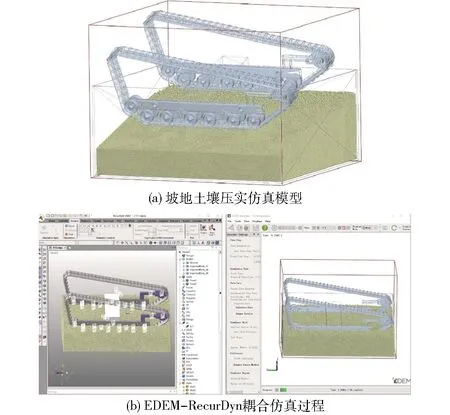
图2 坡地土壤压实仿真Fig.2 Slope soil compaction simulation
2.2 履带对坡地土壤压实过程
坡地工况下两侧履带压实土壤的过程中,不同深度中土壤颗粒接触力分布情况如图3所示。其中,红色颗粒越多,表示该区域土壤所受接触力越大。
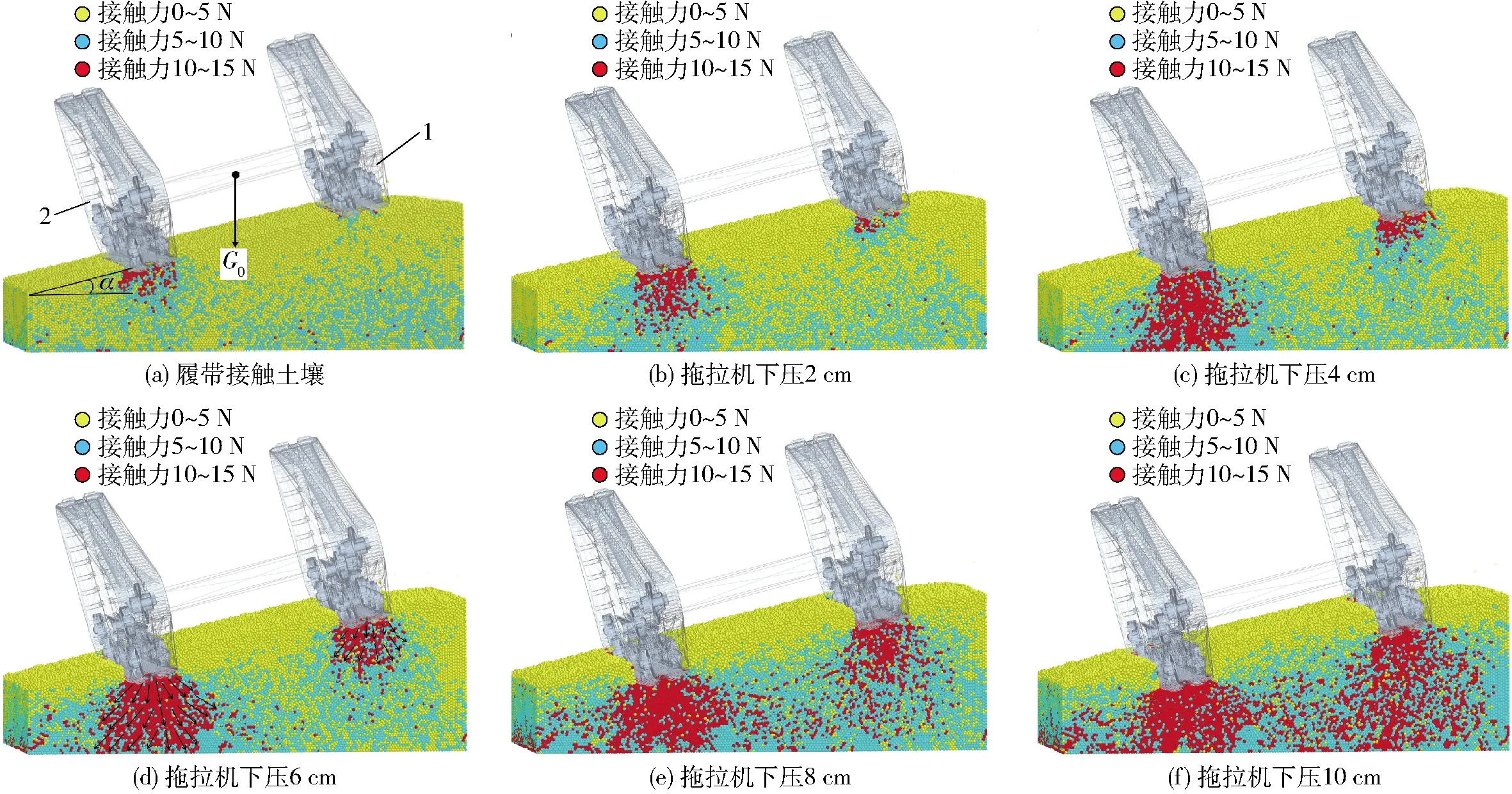
图3 履带压实作用下土壤接触力分布情况Fig.3 Distribution of soil contact force under crawler compaction1.坡高侧履带 2.坡低侧履带
由图3可知,坡高侧履带下方的土壤接触力明显小于坡低侧,这是由于坡地角的存在导致拖拉机重力并不是均匀地分布于两侧履带上,坡低侧履带上的受力高于坡高侧,因此,拖拉机坡地作业时很有必要进行调平来减少坡低侧土壤的压实程度。另外,随着拖拉机两侧履带与土壤颗粒的进一步接触(图3),表层土壤的接触力会呈辐射状(图3d箭头所示)经土壤颗粒的相互作用向更深层传递,原因在于压实过程中土壤的下陷自然受到其下侧土壤的阻碍作用,并且由于土壤颗粒之间还存在一定的粘结力,土壤接触应力沿竖直方向传递的同时也向侧面传递。
2.3 轴载对土壤接触力传递的影响
在EDEM后处理模块中,履带下方土壤沿着坡面方向选取3个深度的土壤层(0~5 cm、5~10 cm、10~15 cm),在RecurDyn软件中设置不同的拖拉机轴载,耦合仿真结束后,将3个土壤层中颗粒所受接触力均值分别导出,最终得到不同轴载对两侧履带下不同深度层土壤接触力的影响如图4所示。
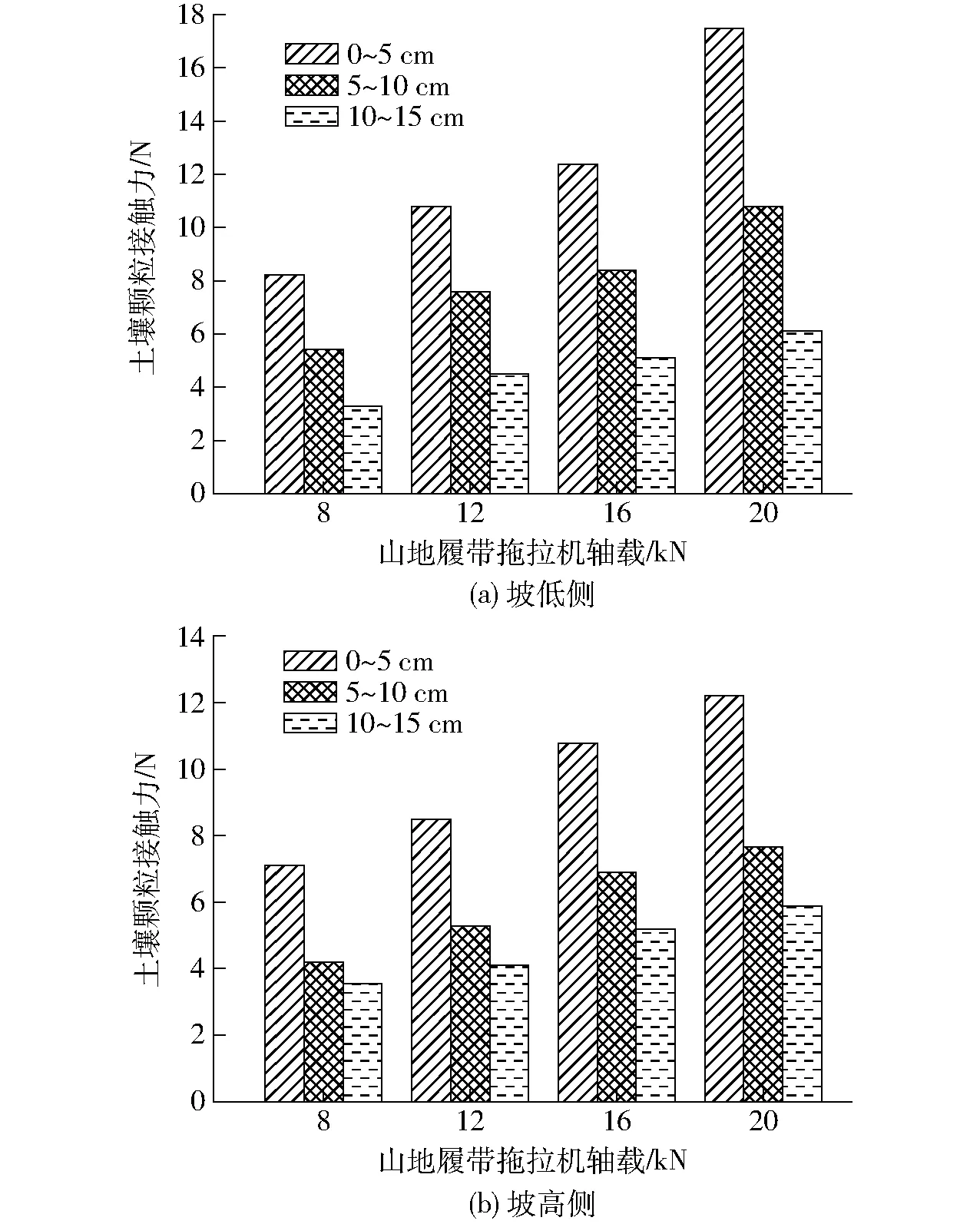
图4 拖拉机轴载对不同深度层土壤颗粒接触力的影响Fig.4 Influence of tractor axle load on contact force of soil particles at different depths
由图4可知,随着山地履带拖拉机轴载的增大,3个土壤层中颗粒的接触力均随之增大;对于坡低侧履带下方土壤,轴载从8 kN增大到20 kN,土层0~5 cm中平均接触力增大了53.1%,土层10~15 cm中平均接触力增大了45.9%;对于坡高侧履带下方土壤,轴载由8 kN增大到20 kN,土层0~5 cm中平均接触力增大了41.8%,土层10~15 cm中平均接触力增大了38.9%。显然,坡低侧的土壤接触力大于坡高侧,并且坡低侧土壤接触力受轴载影响的程度大于坡高侧。这也是由于坡地角使得拖拉机的重力在坡高低两侧履带的分布不均匀,进而导致力在土壤颗粒中的传递出现显著差异。由此可见,山地拖拉机轴载直接影响到坡地土壤的压实程度,并且在等高线坡地上极易出现坡低侧过度压实的情况。土壤中应力分布同时受到土壤参数和机组作业参数的影响。
3 坡地土壤压实土槽与实地试验
3.1 坡地土壤压实试验系统
搭建如图5所示的小型坡地静态试验平台(可实现坡度0°~20°调节)来开展坡地土壤静态压实过程中应力传递规律的研究。该试验平台主要由变坡度土槽、土压力盒、土压力盒数据采集器、标准配重块、土壤、便携式计算机等组成。
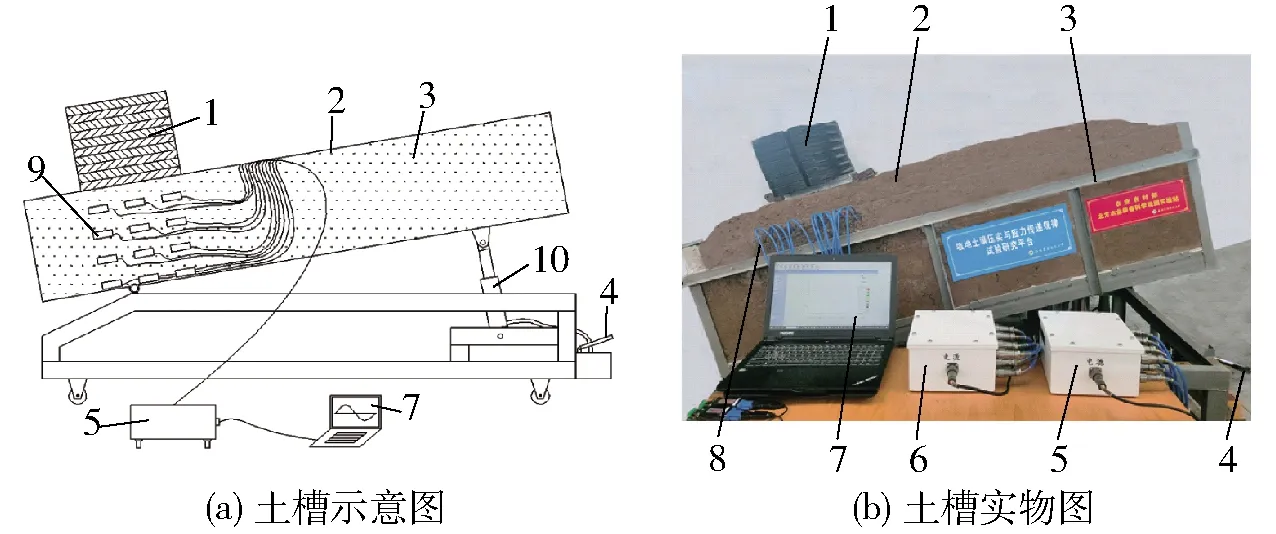
图5 土壤应力传递静态试验平台Fig.5 Soil stress transfer static test platform1.标准配重块 2.土壤 3.变坡度土槽 4.土槽坡度手动调节装置 5.土压力盒多点数据采集器Ⅰ 6.土压力盒多点数据采集器Ⅱ 7.便携式计算机 8.土压力盒数据传输线 9.土压力盒 10.姿态调整液压缸
土壤应力传递动态试验采用的动力机为本团队自主研发的402P型遥控全向调平山地履带拖拉机,动态试验系统如图6所示。其中,山地履带拖拉机可以通过横向姿态调整机构实现其横向调平,以满足等高线作业的稳定性要求,坡地自适应悬挂装置可以保证牵引农具的姿态实时调整,并始终与坡面保持平行,达到坡地等高线仿形的效果。土壤应力通过土压力盒进行采集,采集的信号通过特制专用数据传输线传递至多点数据采集器,经分析处理后实时显示至便携式计算机并存储。通过在山地履带拖拉机三点悬挂装置的铰接点设计并安装销轴式传感器来实时测定在不同作业工况(旋耕、犁耕)下的耕作牵引力,经Coco90型多通道数据采集仪实现获取、处理和保存传感器所采集的信号,这主要是为了观测在试验过程中的牵引负载。
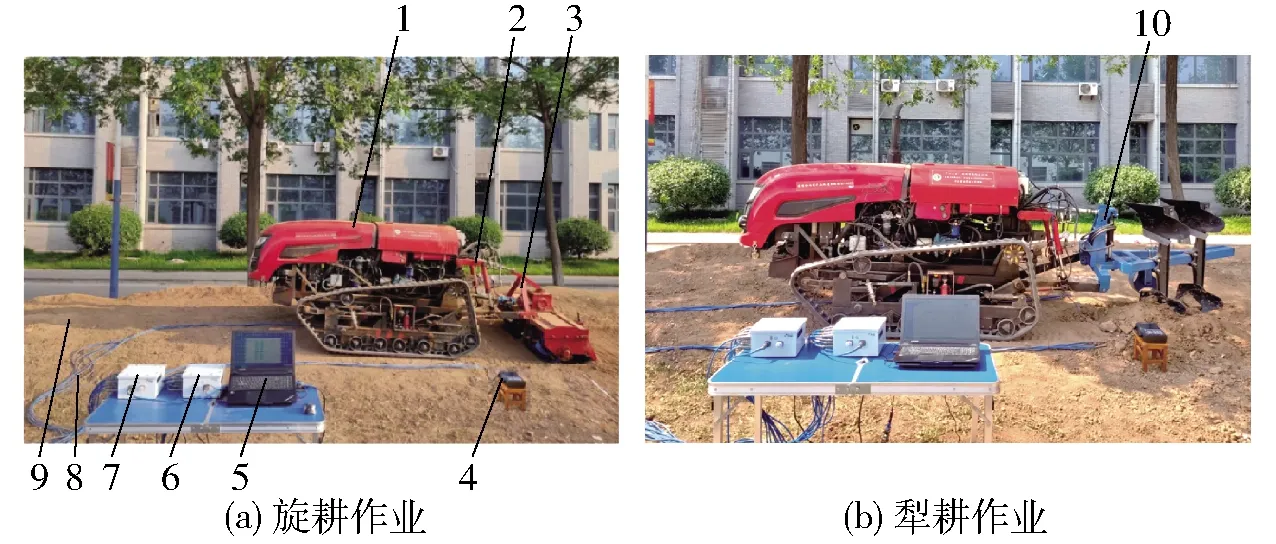
图6 坡地作业工况下土壤应力传递测试系统Fig.6 Soil stress transfer test system under slope working condition1.山地履带拖拉机 2.坡地自适应悬挂装置 3.旋耕机 4.Coco90型多通道数据采集仪 5.便携式计算机 6.土压力盒多点数据采集器Ⅰ 7.土压力盒多点数据采集器Ⅱ 8.土压力盒数据传输线 9.试验坡地 10.两铧翻转犁
3.2 土压力盒埋设方案
履带作用下土壤内部应力采用土压力盒埋设法进行测量,试验用的土压力盒(TGH型振弦式,山东科技大学洛赛尔传感器技术有限公司生产)准确度为0.3%FS,重复性0.2%FS,分辨率为0.01%FS,采集频率25 次/s,尺寸为108 mm×40 mm。土压力盒经特制的数据传输线与DQ-8型数据采集器连接,通过WM-201E型接口转换器将数据导入便携式计算机。
在西北农林科技大学机械与电子工程学院专用试验坡地上沿等高线方向,以履带-土壤接触面中垂线为基准,通过在土壤中打孔埋设的方法将土压力盒(应力取点位置)布置到不同的深度位置处,埋设方案如图7所示。其中,水平应力测试土压力盒用于测试履带对不同深度土壤中产生的水平应力,测力点的埋设深度分别为10、25 cm;侧向应力测试土压力盒用于测试侧向应力,测力点埋设深度分别为10、25、40 cm;垂直应力测试土压力盒用于测试垂直应力,测力点埋设深度分别为5、20、35、50 cm。
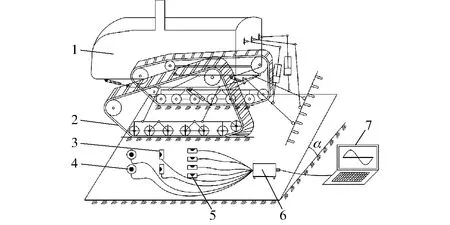
图7 土压力盒坡地布置方案Fig.7 Layout scheme of soil pressure sensor on sloping land1.山地履带拖拉机 2.橡胶履带 3.水平应力测试土压力盒 4.侧向应力测试土压力盒 5.垂直应力测试土压力盒 6.土压力盒数据采集器 7.便携式计算机
3.3 土槽静态试验
山地履带拖拉机整机载荷、土层深度、土壤含水率、初始紧实度均影响土壤应力的传递规律[15],因此坡地土壤内部应力传递规律研究主要从上述方面展开。
3.3.1土壤垂直应力随土层深度的变化规律
在土壤含水率和初始紧实度一定的条件下,不同深度土壤内部的垂直应力随着加载质量及坡地角(试验台倾角)的变化规律如图8所示。
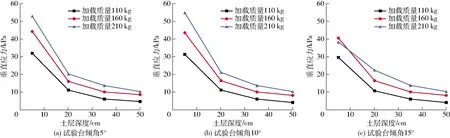
图8 不同深度土层中应力分布Fig.8 Stress distribution in soil layers with different depths
由图8可知,随着土层深度的增加,土壤中的垂直应力是逐渐减小的,并且,不同试验台倾角下均存在相同的规律;但是,由图8b、8c可知,当试验台倾角达到15°,加载质量为210 kg时,土层深度5 cm处土压力盒所采集到的应力小于试验台倾角处于10°状态下应力,原因在于加载质量继续增大时,随着坡度角的增大,加载物重心高度发生相应的变化,从而影响整个加载物对土层力的作用位置,类似地,在丘陵山区坡耕地上,随着坡地角的增加或者牵引负载的增大,均会导致作业机组的重心位置发生变化,进而影响到机组的稳定性和对土壤的压实情况。并且,应力传递性能随着土层深度增加而逐渐减弱,原因在于土壤在压实过程中产生明显的弹塑性变形,这种变形有过程、有惯性,导致应力在传播中不断衰减[19]。
3.3.2坡地角对不同方位土壤应力的影响
坡地角(试验台倾角)对不同方位土壤的内部垂直应力传递影响情况如图9所示。
由图9可知,同一土层深度,位于加载物正下方土壤应力最大,加载物正下方两侧土壤压力均小于该值;并且,随着试验台倾角增大,顺坡低侧土层中应力呈逐渐增大的趋势,反之,顺坡高侧土层中的应力呈递减趋势,原因在于,随着坡度的增加,加载物的重力沿着坡面向下的分力逐渐增大,使应力在坡低侧的土层中聚集并传递。
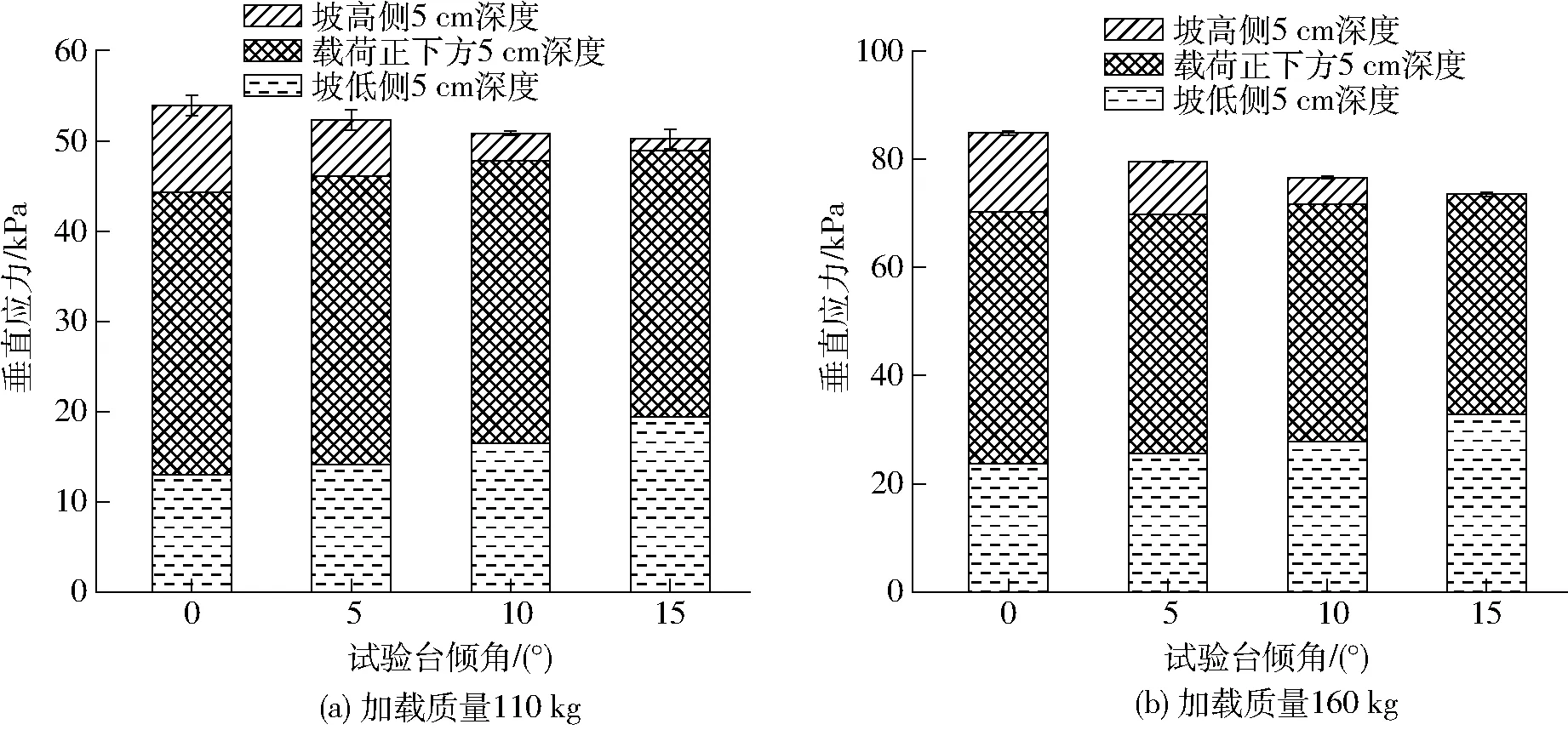
图9 相同深度不同方位处土壤应力分布Fig.9 Soil stress distribution at different positions at the same depth
土壤含水率是影响其作业性能以及耕作质量的重要因素,不适宜作业的土壤含水率会促使土壤板结,严重影响作物生长。文献[18]提出最适宜旋耕和犁耕作业的土壤含水率为18%~22%。因此,通过单因素试验分析在坡地角(试验台倾角)和拖拉机载荷(加载质量)、土壤初始紧实度一定情况下,土壤内部不同深度上的应力随含水率(梯度设定为15%、18%、21%、24%)的变化规律,设定加载质量160 kg,试验台倾角15°,土壤初始紧实度2.0 MPa,结果如图10所示。
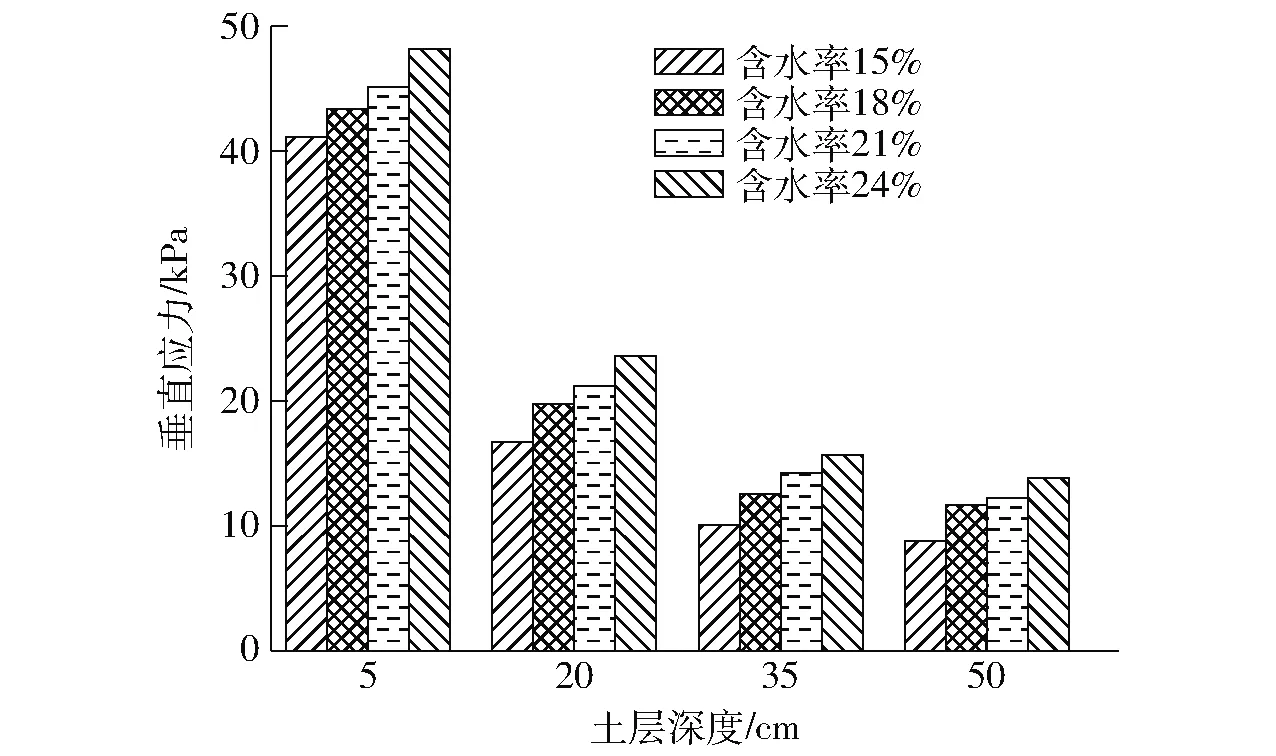
图10 含水率对土壤中应力分布的影响Fig.10 Influence of water content on stress distribution
由图10可知,在试验台倾角、加载质量均一定的情况下,土壤含水率15%~24%范围内,随着含水率的增大,土壤中的应力更容易向深度方向传递,主要是由于:本文研究的土壤类型为粘壤土,当含水率较小时,土壤中水主要是强结合水,土壤颗粒周围的结合水膜很薄,使颗粒间具有较大的分子引力,阻止土壤颗粒的移动,造成压实困难;含水率适当增大时,土壤中水包括强结合水和弱结合水,结合水膜变厚,土壤颗粒之间的联结力减弱而使土粒易于移动,易被压实。因此,在丘陵山地机械作业时应充分考虑土壤含水率这一因素,合理规划拖拉机下地作业时间[19-20],尽可能减小机械压实。
3.3.4土壤初始紧实度对土壤应力传递的影响
在土壤含水率18%±1%条件下,设定4种土壤初始紧实度(1.0、2.0、3.0、4.0 MPa),得到不同土层深度土壤应力分布如图11所示。
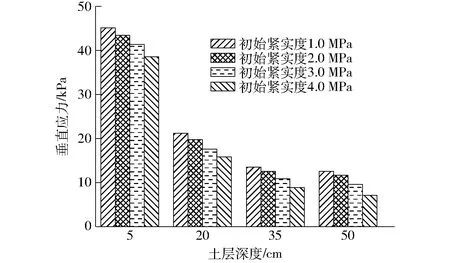
图11 土壤初始紧实度对土壤中应力分布的影响Fig.11 Influence of soil initial compaction on stress distribution
由图11可知,在试验台倾角、加载质量均一定的情况下,土壤紧实度1.0~4.0 MPa范围内,初始紧实度越小,土壤应力传递深度越大,即应力越容易通过土壤传递到更深的位置,反之,初始紧实度大的土壤不容易被压实。原因在于,土壤的压实一般由两个因素[21-22]决定:①施加的载荷,这取决于农业机械的轴载。②土壤的机械强度,这取决于土壤的固有特性(如质地和有机质)、瞬态特性(含水率和紧实度),土壤含水率一定的情况下,其抗压强度主要与土壤紧实度相关,初始紧实度越大的土壤中总空隙度越少,越不易被压缩。因此,山地拖拉机应选择合适的土壤紧实度下地作业,尽可能降低较松软土壤条件下的机械压实。
3.4 坡地动态试验
在静态试验分析基础上,对山地履带拖拉机等高线行驶、旋耕以及犁耕3种工况下履带行走机构对坡高、坡低两侧土壤的动态压实规律进行了分析。
3.4.1行驶速度对垂直应力分布的影响
山地履带拖拉机未调平状态下,在等高线坡地15°上设定速度0.5、1.0、1.5 km/h挂接旋耕机行驶,探究埋设深度5、20、35、50 cm在履带长度方向上应力变化如图12所示。
长沙磁浮快线是世界上第三条中低速磁浮商业运营线。作为无更多冗余设计的系统,磁浮列车悬浮系统的可靠性设计至关重要。在设备高可靠性的基础上,采用简单有效的控制算法,以便在不同工况和线路条件下,使悬浮控制系统达到优良的状态,以及增加乘客乘坐舒适性,成为磁浮列车悬浮控制系统优化的首要目标。本文通过总结长沙磁浮快线悬浮控制系统调试经验,得到的主要结论如下:
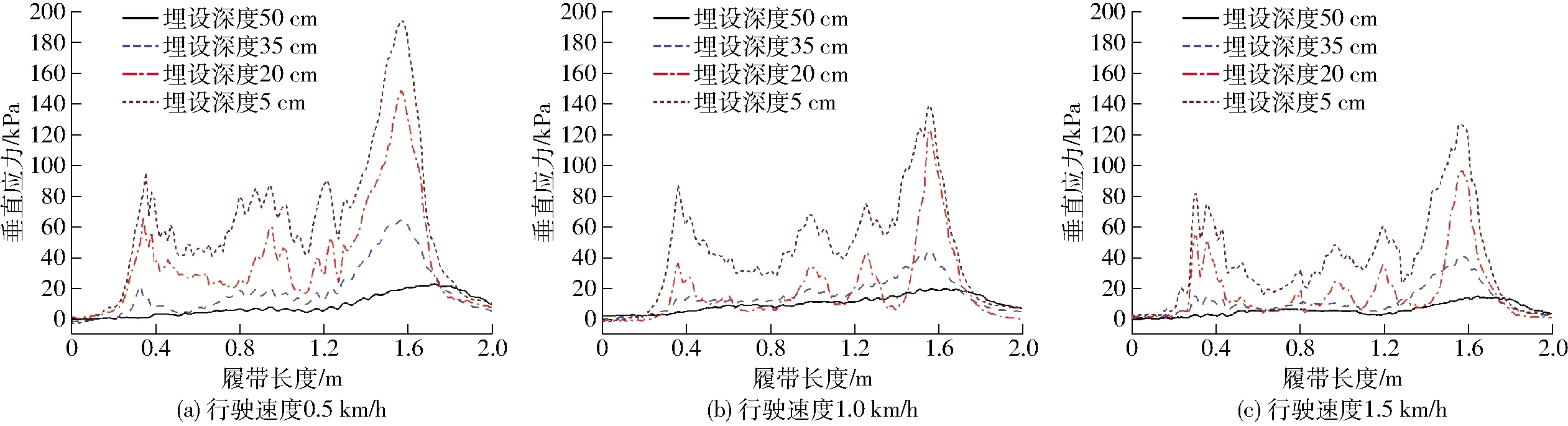
图12 履带行走机构压实作用下0.5 m土层深度内垂直应力沿履带长度方向的分布Fig.12 Vertical stresses distribution in track length direction at 0.5 m soil depth under compaction of tracked undercarriage
由图12可知,履带下方的垂直应力在履带长度方向上的分布不均匀,出现了4个不同的应力峰值,履带与土壤接触面以及较浅层土壤内垂直应力的峰值点主要出现在各支重轮下方的轴线处,但是,较深层(50 cm深度左右)土壤垂直应力的峰值点出现明显滞后,大约在支重轮轴线的后方0.2 m处,主要是因为:在外部载荷作用下,土体中某点的应力既受作用力的影响,还受应力应变传播速度的影响,并且土壤的变形有过程和惯性,以致应力传递至较深土壤中需要一定的时间。丁肇[23]研究中得出了近似的结论:深度0.35 m处的垂直应力峰值出现在支重轮轴线的后方0.15 m处。并且,不同土壤深度处的最大应力峰值均出现在拖拉机驱动轮下方的支重轮处,原因在于山地拖拉机的变速箱、驱动后桥、液压系统等部件均布置在此处,并且挂接旋耕机后山地拖拉机机组的重心较拖拉机自身重心有一定的向后偏移量。
随着土壤深度的增加,垂直应力的峰值和平均值均会逐渐减小,原因在于:履带行走机构作用下土壤中的空气逸出、水分流散、土粒位移进而使得土体法向发生变形,部分垂直应力在传递过程中用于实现上述变形,进而导致垂直应力不断衰减。并且,浅层土壤垂直应力在履带行走机构作用下更为敏感,表现为应力曲线波动较大,应力峰值跳动明显,深层反之。由图12可以得出,随着拖拉机行驶速度的增大,土壤中垂直应力逐渐减小,原因在于土壤变形有一定的过程,且应力传递情况与应力及应力的持续时间有关,拖拉机速度增大导致应力在土壤中的持续时间减小。从而导致该区域的土壤应力尚未达到最大值,拖拉机已经经过该区域[24-25]。
3.4.2车身姿态对垂直应力分布的影响
前述仿真试验结果已知,坡地等高线工况下,山地履带拖拉机姿态对两侧履带下的垂直应力影响较为明显,因此在坡度15°坡地上进行车身调平前和调平后的行驶试验,通过土压力盒采集坡低、坡高两侧履带正下方5、20、35、50 cm处的垂直应力,结果如图13所示。
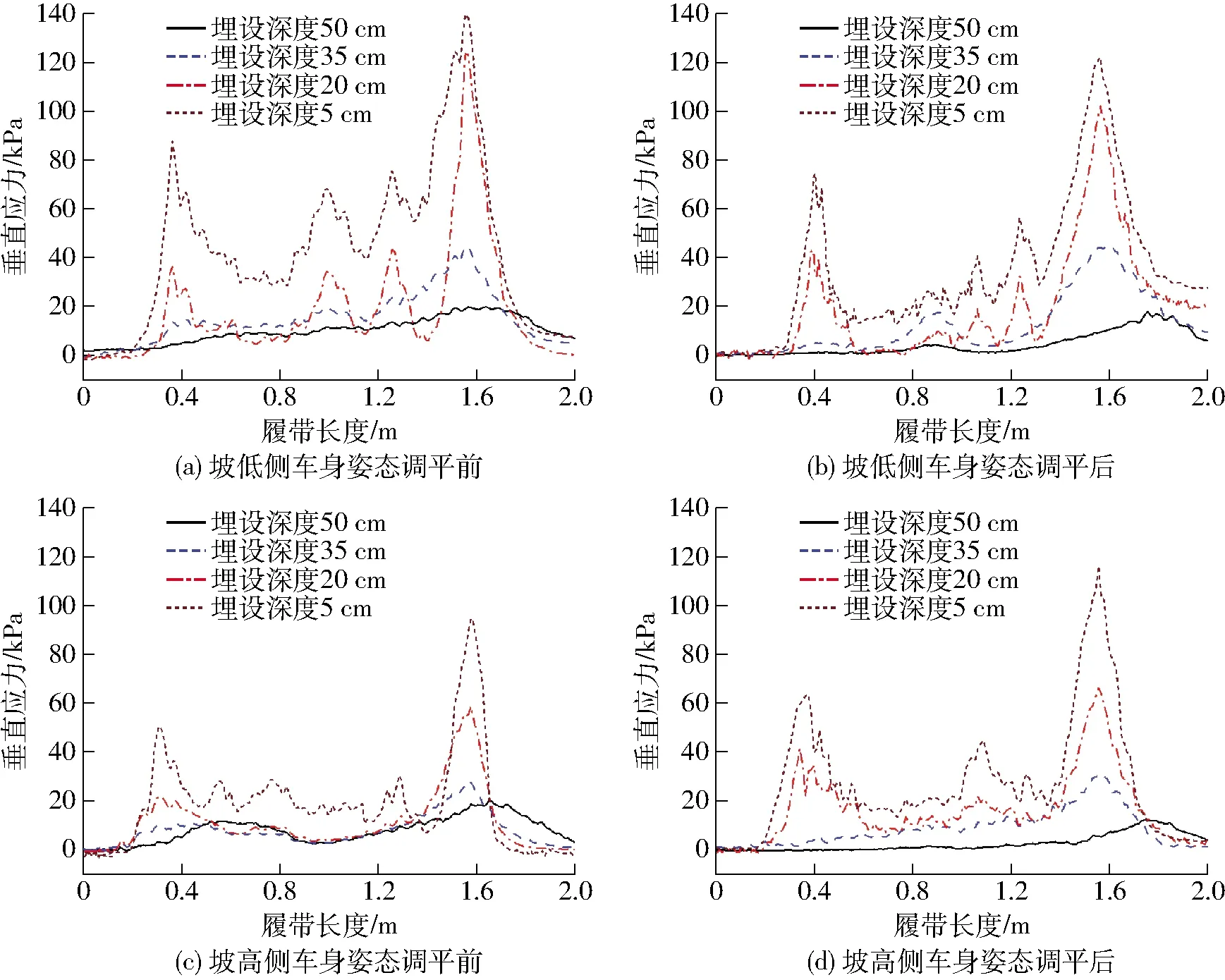
图13 车身姿态调平前后坡高、低两侧履带下垂直应力分布Fig.13 Vertical stresses distribution under track on both sides of slope before and after tractor attitude leveling
由图13a、13c可知,山地拖拉机未调平状态下,坡低侧履带下的土壤应力峰值大于坡高侧,约大了40%。这是坡度导致拖拉机的重力在两侧履带上的分配不均匀造成的。
由图13a、13b对比可知,图13c、13d对比可知,山地履带拖拉机姿态调平后,坡低侧的垂直应力峰值明显减小,坡高侧的垂直应力峰值明显增大,尤其是浅层土壤中(5、20 cm处)应力变化的程度最为显著,原因在于姿态调平后山地履带拖拉机的重心发生一定程度的侧向(向坡高侧)偏移,使得拖拉机的重力较为均匀的分布在两侧履带上,导致不同土层深度上的应力分布均匀性显著提高;深层土壤中(35、50 cm处)的应力变化并不明显;综上,山地拖拉机的横向调平,一方面可以有效减小坡低侧土壤中应力峰值,提高拖拉机两侧履带下应力分布的均匀性,消减坡低侧土壤的压实程度,这是减轻山地履带车辆对坡地土壤压实的关键性因素;另一方面,可以有效减小坡低侧履带的沉陷量,提高拖拉机的通过、牵引附着性能。
3.4.3行驶速度对水平应力分布的影响
山地履带拖拉机未调平状态下,在坡度15°等高线坡地上设定速度0.5、1.0、1.5 km/h挂接旋耕机行驶,土压力盒竖直布置于深度10、25、40 cm(应力测点深度)处,测得不同深度水平应力在履带长度方向上的分布情况,如图14所示。
由图14可知,水平应力在履带长度方向的分布不均匀,在拖拉机后部驱动轮下方的支重轮处出现最大值。原因在于,山地履带拖拉机行驶时,在驱动力矩的作用下,履带与土壤接触的各个微小部分都会产生土的反作用力,这些反力的水平分力形成拖拉机前进的切线牵引力,试验路面为松软路面,切线牵引力主要由土的剪切反力产生,履带接地的最前端的点因与地面刚接触,剪切变形为0,而后续各点的剪切变形均比其大,此时水平剪切位移沿着接地长度方向不断积累,在接地段的最后部达到最大值。另外,较低速(0.5 km/h)行驶时,浅层土壤中各支重轮前方位置也出现应力峰值,主要是由于支重轮对土壤的推力作用所形成。
随着山地拖拉机行驶速度的增大,不同土层深度上的水平应力均减小,但是水平应力随着行驶速度的减小量明显小于垂直应力;其中浅层(10 cm深度)的减小程度最明显,深层(40 cm深度)土壤水平应力变化不大。原因在于:土壤中的水平应力是拖拉机履带施加到土壤的垂直载荷和履带行驶对土壤施加的水平载荷共同作用产生的,由于土壤深层的垂直载荷小,故深层的水平应力会更小。并且,在支重轮的轴线所在的竖直平面与土压力盒测力点所在的竖直平面重合时,垂直载荷所引起的水平应力为0,此时土壤中的水平应力仅由水平载荷引起,其出现最小值。
3.4.4车身姿态对两侧履带下水平应力分布的影响
山地履带拖拉机等高线行驶过程中,两侧履带下的水平应力可以反映拖拉机的牵引附着性能,因此在坡度15°的坡地上进行车身调平前、后的行驶试验,通过土压力盒采集坡低侧和坡高侧履带正下方10、25、40 cm处的水平应力,结果如图15所示。
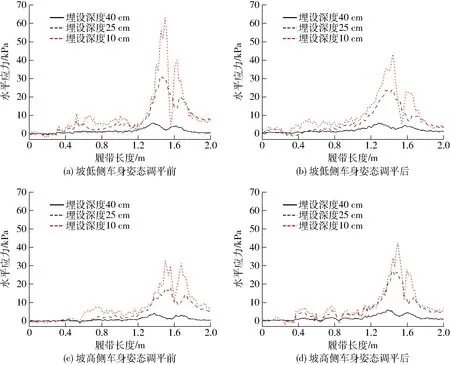
图15 车身姿态调平前后坡高、低两侧履带下水平应力分布Fig.15 Horizontal stresses distribution under track on both sides of slope before and after tractor attitude leveling
对比图15a、15b,图15c、15d可知,山地拖拉机姿态调平后,坡低侧的水平应力峰值明显减小,坡高侧的应力峰值明显增大,这是由于土壤中的水平应力主要是土壤在水平载荷(履带的水平推力)下产生的,并且本文所研究的土壤类型为粘壤土,其既不是纯粘性土壤,也不属于摩擦性土壤,而是两种土壤的混合物,此时履带的最大水平推力Fmax计算式为
(10)
式中A′——履带接地面积,m2
τmax——最大水平应力(剪切应力),kPa
C——土壤内聚力,N
φ——土壤内摩擦角,(°)
由式(10)可知,当车身调平之后,坡低侧最大垂直应力σmax减小,因此,在履带接地面积A′不变的情况下,该侧履带的最大水平推力Fmax减小,坡高侧与之相反,此时,两侧履带下土壤的水平应力更为均匀。由此可得,车身的调平可提高两侧履带水平推力一致性,这对于提高拖拉机的附着性及坡地行驶平稳性具有积极作用。
3.4.5车身姿态对沿坡地侧向应力的影响
由于山地履带拖拉机坡地等高线行驶时会出现一定程度的侧向滑移,这种履带的滑移现象会对土壤产生侧向推力,从而导致土壤侧向的压实。为了探究车身姿态对坡高、低两侧履带侧下方土壤的压实情况,开展了车身调平前后履带侧下方土壤应力分布的试验,试验结果如图16所示。
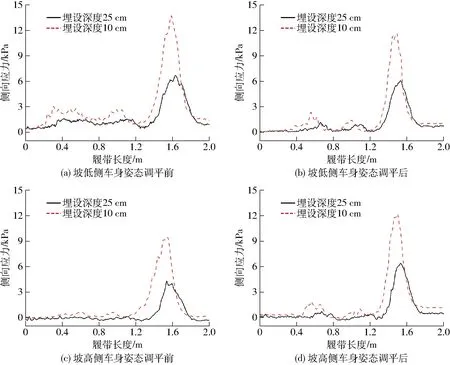
图16 车身姿态调平前后坡高、低两侧履带下侧向应力分布Fig.16 Lateral stresses distribution under track on both sides of slope before and after tractor attitude leveling
由图16可知,山地履带拖拉机姿态调平前,坡低侧履带下方土壤的侧向应力峰值明显高于坡高侧,姿态调平后,两侧履带对土壤的侧向应力基本趋于相近。原因在于,当山地拖拉机处于等高线坡地时,坡地角的存在使其有发生横向侧滑的趋势,土壤与履带接触面处的摩擦力一定程度上可以抑制这种侧滑现象的产生,该摩擦力可以视为一种沿坡面的侧向推力,其所引起的侧向剪切应力会在土壤内部传递,并且摩擦力与土壤的抗剪强度、拖拉机履带作用于土壤的正压力密切相关。在土壤抗剪强度一定的情况下,拖拉机车身调平可使两侧履带对土壤的正压力趋于一致,进而提高土壤侧向应力均匀性。因此,调平对降低坡地土壤的侧向压实以及拖拉机侧向滑移率具有积极作用。
3.4.6牵引负载对垂直和水平应力的影响
为了探究牵引负载对山地履带拖拉机履带下方应力(垂直应力和水平应力)分布的影响情况,在拖拉机调平状态下,进行了相同耕深下的旋耕和犁耕对照试验,试验结果如图17所示。
由图17a、17b可知,在相同耕作深度12 cm,犁耕和旋耕作业工况下,垂直应力的波形有着很大区别,原因在于旋耕机作业时,载荷冲击和振动较为明显,导致履带下方的垂直应力发生较为频繁的波动,犁耕作业时,牵引力会使得拖拉机组的重心整体向后偏移,导致后侧履带的接地压力大于前段,垂直应力峰值主要出现在后两个支重轮位置处。此外,在两种作业工况下,水平应力的峰值相差不大,但是旋耕作业时,出现多个峰值,主要是由于旋耕过程中,正转旋耕对拖拉机有向前的推力,这种推力是动载荷,从而导致履带对土壤的水平应力是动态变化的过程。
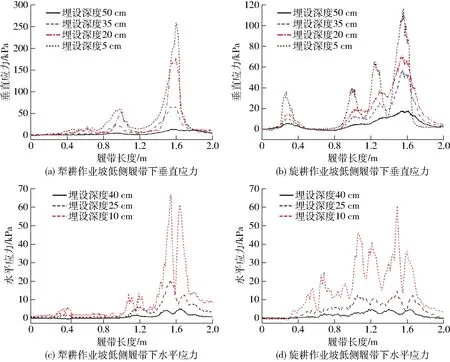
图17 牵引负载对垂直、水平应力的影响Fig.17 Influence of traction load on vertical and horizontal stress under track
3.4.7履带张紧力对履带下垂直和水平应力影响
由于山地履带拖拉机在横向姿态调平过程中,履带的包络形状是会发生变化的,因此为了保证履带的张紧度,设计了基于蓄能器的橡胶履带随动张紧装置,如图18所示。
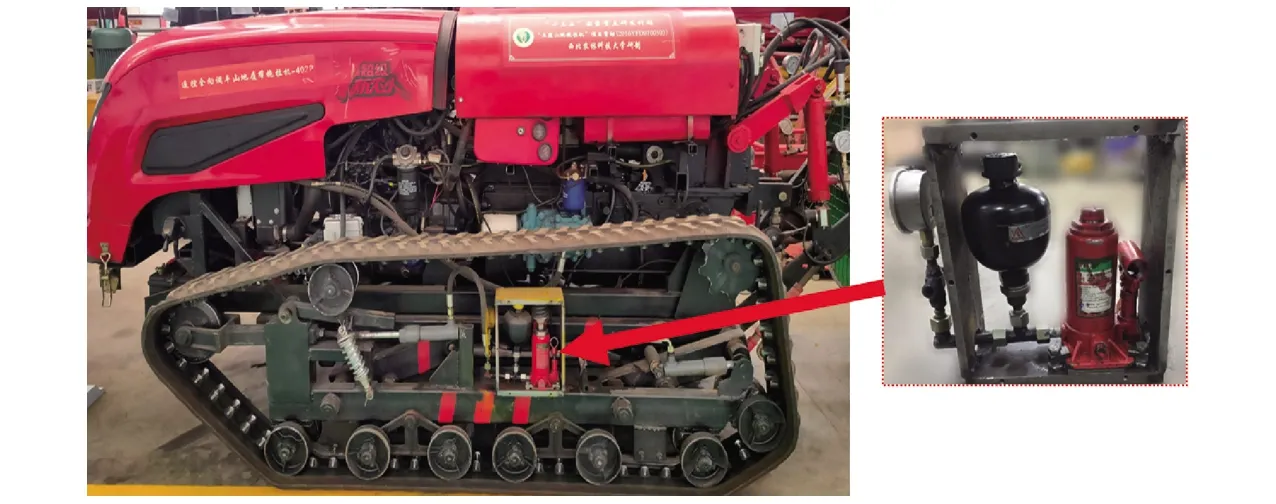
图18 基于蓄能器的橡胶履带随动张紧装置Fig.18 Accumulator-based rubber track follow-up tensioner
为了探究车身调平过程中,履带张紧力对拖拉机附着性能的影响,设定行驶速度0.5 km/h,悬挂旋耕机在坡度15°的等高线坡地行驶,测定在3种履带张紧力(1.2×104、1.0×104、8.0×103kPa)下深度5 cm土层的垂直应力和深度10 cm土层水平应力的分布,每个张紧力条件下进行3组试验取均值,试验结果如图19所示。
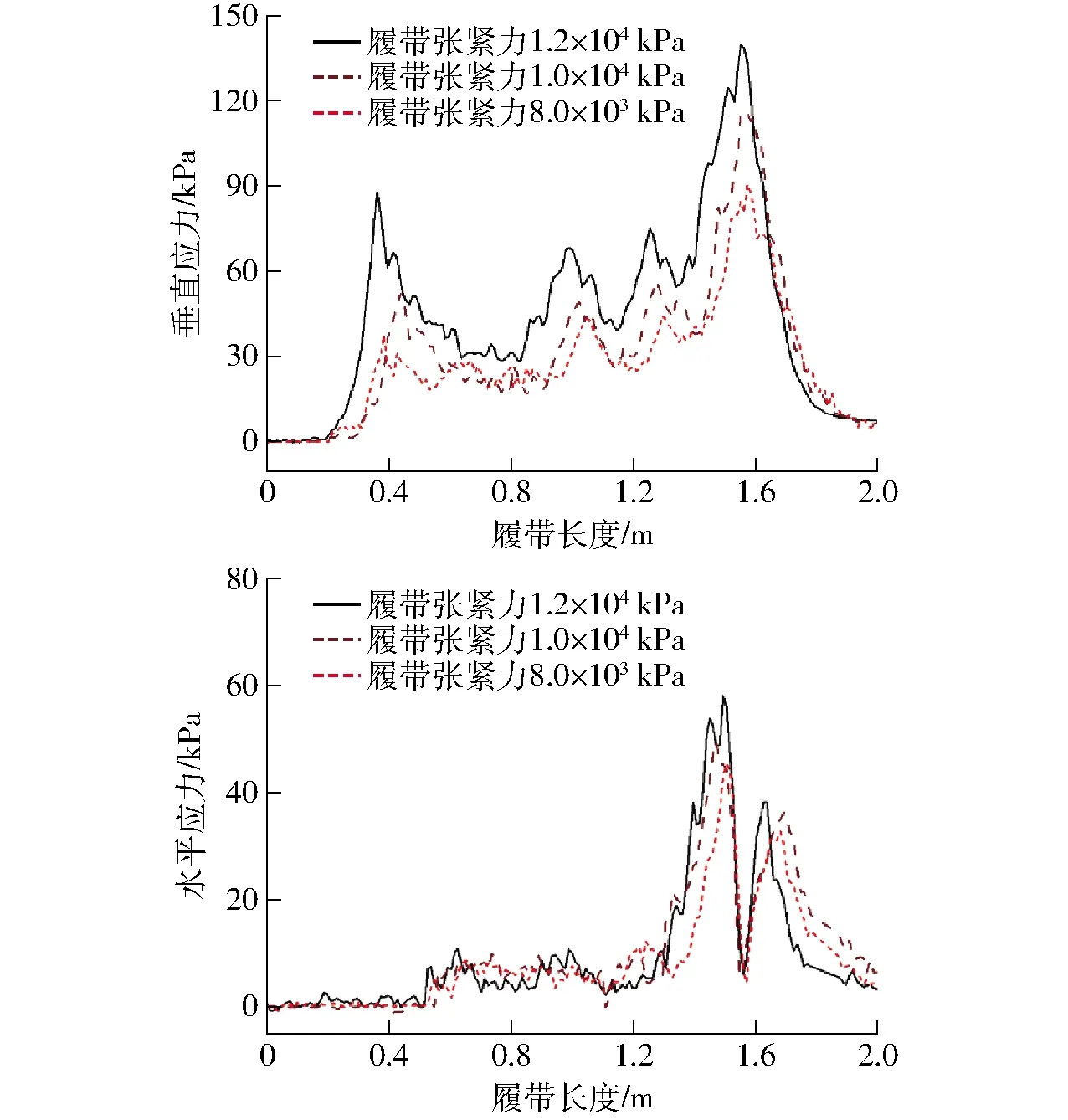
图19 坡低侧履带张紧力对垂直和水平应力的影响Fig.19 Effect of track tension on vertical and horizontal stress distribution at low slope side
由图19可知,3种履带张紧力情况下,履带下的垂直应力与水平应力均有类似的变化规律,随着履带张紧力的减小,土壤中垂直应力峰值减小明显,当履带张紧力由1.2×104kPa减至8.0×103kPa,土壤中垂直应力的峰值减小了约31%,这说明减小履带张紧力,可以有效提高垂直应力在履带接地长度方向上的均匀性,原因在于,当山地拖拉机在松软坡面行驶时,接地履带分为两部分(各支重轮之间的履带和支重轮下的履带),本文山地拖拉机所用履带为柔性履带,具有充分的挠性,其与土壤接触时,各支重轮之间的履带会受到土壤的反作用力产生一定的挠度变形。当张紧力减小时,履带挠度变形增大,所有支重轮可以更充分地附着于履带上,减小了因支重轮与履带未有效接触所造成的土壤局部应力集中,进而使得履带下的土壤应力分布更为均匀。随着张紧力的减小,水平应力的减小并不明显。综上,虽然减小履带的张紧力会提高履带下应力分布的均匀性,一定程度上减小土壤的压实程度,但是在坡地试验过程中,由于履带张紧力不够,出现了轻微的履带跳齿现象,已经影响到拖拉机在坡地的正常行驶,如果继续减小履带的张紧力,将会导致履带脱轨等严重后果。因此,在实际坡地作业时,要根据所需的牵引力,在保证正常工作的张紧力条件下,适当将其减小,来提高应力的均匀性达到消减土壤压实的效果。
4 结论
(1)对坡地工况下履带最大接地比压与应力传递基本规律进行了分析,得出导致坡地工况两侧履带下土壤应力分布不均的因素是坡地角,导致履带长度方向上土壤应力分布不均的主要因素是拖拉机重心位置以及牵引负载。
(2)EDEM-RecurDyn耦合仿真试验结果表明,随着山地拖拉机两侧履带与土壤颗粒的进一步接触,表层土壤的接触力会通过土壤颗粒相互作用向更深层传递。履带下方的土壤应力由点到面逐渐向四周传递。
(3)土槽静态压实试验和实地动态压实试验结果表明:坡地土壤的垂直应力随着深度增加而变小,坡地角严重影响垂直应力在土壤深度方向的传递,在土壤含水率15%~24%范围内,这种传递能力随着土壤含水率的增大而增大;并随着土壤初始紧实度的增大而减小。履带下的垂直应力在各支重轮的轴线处呈现一个应力峰值;水平应力在各支重轮轴线的前、后方分别出现一个应力峰值;适当增大作业速度,可减小土壤内部垂直和水平应力峰值,当拖拉机速度由0.5 km/h增加到1.5 km/h,垂直应力峰值减小了35%,水平应力峰值减小了27%;等高线坡地上的车身调平可以较好地提高两侧履带下土壤应力均匀性,坡低、坡高两侧的垂直应力峰值分别降低13%和增加18%,坡低、坡高两侧的水平应力峰值分别降低28%和增加23%;履带张紧力由1.2×104kPa减小到8.0×103kPa时,垂直及水平应力峰值分别减小了约31%和22%,即适度减小履带张紧力可减小土壤压实。
猜你喜欢
——从我国第一代地铁车DK1到山地城市地铁车As
城市轨道交通研究(2022年2期)2022-11-19
土壤学报(2022年1期)2022-03-08
建材发展导向(2021年7期)2021-07-16
兵器装备工程学报(2021年3期)2021-04-09
中国房地产业·下旬(2019年7期)2019-09-27
科学与技术(2018年9期)2018-04-30
创新作文(1-2年级)(2017年11期)2018-04-17
幸福·婚姻版(2017年9期)2017-09-22
诗林(2016年5期)2016-10-25
坦克装甲车辆(2000年6期)2000-06-13