卷盘式喷灌机智能灌溉模糊控制技术研究
2022-08-08 03:31郭依剑朱兴业陈盛源刘俊萍李伟
灌溉排水学报 2022年7期
郭依剑,朱兴业*,陈盛源,刘俊萍,李伟
卷盘式喷灌机智能灌溉模糊控制技术研究
郭依剑1,朱兴业1*,陈盛源2,刘俊萍1,李伟1
(1.江苏大学 流体机械工程技术研究中心,江苏 镇江 212013;2.温岭市产品质量检验所,浙江 温岭 317599)
【目的】提高卷盘式喷灌机的灌溉性能。【方法】基于模糊控制理论实现对卷盘式喷灌机灌溉系统的智能控制,以土壤湿度偏差和土壤湿度偏差变化率作为系统的输入变量,以桁架车牵引速度作为系统输出变量,通过对系统输入变量进行模糊处理,运用模糊推理运算,获得桁架车牵引速度的模糊值,最后将模糊结果清晰化处理,得到桁架车牵引速度的真实值,并通过电机驱动实现喷灌机桁架车的行进。【结果】当土壤湿度偏差和土壤湿度偏差变化率较大时,喷灌机桁架车牵引速度较慢,可增加灌水量;当土壤湿度偏差和土壤湿度偏差变化率较小时,喷灌机桁架车牵引速度较快,可减少灌水量。【结论】针对不同的土壤湿度和土壤湿度偏差变化率,系统可以改变喷灌机桁架车牵引速度,进而改变灌水量,以达到对田间作物进行精准灌溉的目的。
卷盘式喷灌机;智能灌溉;模糊控制
0 引言
【研究意义】我国水资源虽然总量丰富但人均占有量较少,是世界上水资源严重短缺的国家之一。2020年中国用水总量为5 812.9亿m3,其中农业用水量高达3 612.4亿m3,占全国用水总量的62.1%。然而,农业灌溉用水效率总体偏低,农田灌溉水有效利用系数仅为0.565,与发达国家相比尚有一定差距,节水灌溉率仅为25%,远低于国际先进水平[1-3]。因此,加强农业用水管理,发展节水灌溉对于实现中国的农业可持续发展具有重要的现实意义[4]。
【研究进展】近年来,随着我国高标准农田建设的不断发展,节水灌溉装备的研发迎来了新的发展机遇。卷盘式喷灌机因其机动性能好、适应性强等优点,在我国具有较高的市场份额。然而,卷盘式喷灌机智能灌溉控制系统的性能仍有待于进一步提升[5-6]。由于节水灌溉是一个非线性系统,无法对其建立一个精确的数学模型,而模糊控制理论在应用过程中不需要掌握被控制对象的精确模型,只需要根据专家知识或操作人员的经验就可制定有效的控制策略,控制系统的鲁棒性较好,因此在节水灌溉控制系统的研发中被广泛采用。王海华等[7]采用MSP430单片机作为主控器,并嵌入模糊和PI分段控制策略,对水肥一体化混肥装置的控制系统进行了优化,为水肥调控策略提供了理论依据。吴兴利等[8]将模糊控制技术应用于植物智能滴灌系统,实现了农作物的适时灌溉,将土壤湿度控制在设置的区间内,在灌水量相同的情况下使用智能滴灌系统使作物长势得到了优化。刘洪静等[9]以LabVIEW为平台,开发了一套基于模糊控制理论的蔬菜智能灌溉系统,实现了田间土壤墒情的实时采集、数据的无线传输、科学灌溉决策、人机交互等高端功能。刘斌等[10]将农田土壤墒情作为模糊控制器的输入变量,基于Smith预估模糊控制器实现了作物灌溉需水量的模糊控制;Sun等[11]为了实现精确的灌溉施肥,通过神经网络预测控制对灌溉量、施肥量和肥料配比进行控制,通过模糊控制理论对肥料溶液混合系统进行精准控制。Abdelouahed等[12]通过模糊逻辑控制器,利用气候数据来估算满足作物需求的最佳灌溉时间,有效地避免了不成功灌溉任务的调度。
【切入点】目前,模糊控制理论主要被用于温室环境下的灌溉决策,而在大田环境中的应用案例较少。在大田环境下,卷盘式喷灌机是农户使用相对较多的一种灌溉装备,在操作过程中,农户主要通过对土壤含水率进行观测来粗略地控制喷灌机桁架车的牵引速度,缺乏精准的理论指导,易造成灌水量不足或过度灌溉。【拟解决的关键问题】鉴于此,本研究基于模糊控制理论,旨在实现卷盘式喷灌机桁架车牵引速度在田间灌溉过程中的精准控制,使卷盘式喷灌机的灌水量不超过田间湿润层的水分上限,以达到节水灌溉的目的。
1 系统设计
1.1 卷盘式喷灌机的构成和工作原理
卷盘式喷灌机通常由喷头车(喷枪或桁架)、输水软管(PE管)、卷盘、驱动装置(水涡轮、直流电机)、减速箱几部分组成。大型卷盘式喷灌机还具有液压传动与人机交互系统,动力能源目前主要来源于电力和燃油,太阳能作为清洁能源也逐渐被使用。卷盘式喷灌机在喷灌作业前,由拖拉机将桁架车拖至田块一端,开启水泵供水,卷盘在动力机的驱动下开始回收PE管,桁架车在PE管的牵引下开始喷灌,当PE管全部回收至卷盘上后,关闭水泵,喷灌作业完成。
1.2 控制系统的硬件设计
控制系统框架如图1所示。控制系统主要由土壤湿度传感器、LoRa无线传输模块、控制器、水泵及无刷直流电机组成。采用频域型传感器实时采集土壤湿度数据,该传感器利用电磁脉冲原理,根据电磁波在介质中的传播频率来测定土壤的表观介电常数,从而得到土壤体积含水率。土壤湿度传感器采集数据完成后,通过LoRa无线传输模块上传至控制器,LoRa无线通信技术具有低功耗、可远距离传输的突出优势,对于大田环境,LoRa无线传输更适用于无线传感网络的构建。控制器以STM32F103ZTE6单片机为核心,通过对数据的实时处理、输出PWM信号控制无刷直流电机。无刷直流电机采用电子换向代替传统的机械换向,故障率低、体积小、效率高、性能更为可靠,更有利于卷盘式喷灌机桁架车牵引速度的控制。系统通过输出不同占空比的PWM信号,控制电机转速,进而控制桁架车牵引速度。同时,控制器还可以通过继电器控制水泵开启和实现人机交互。
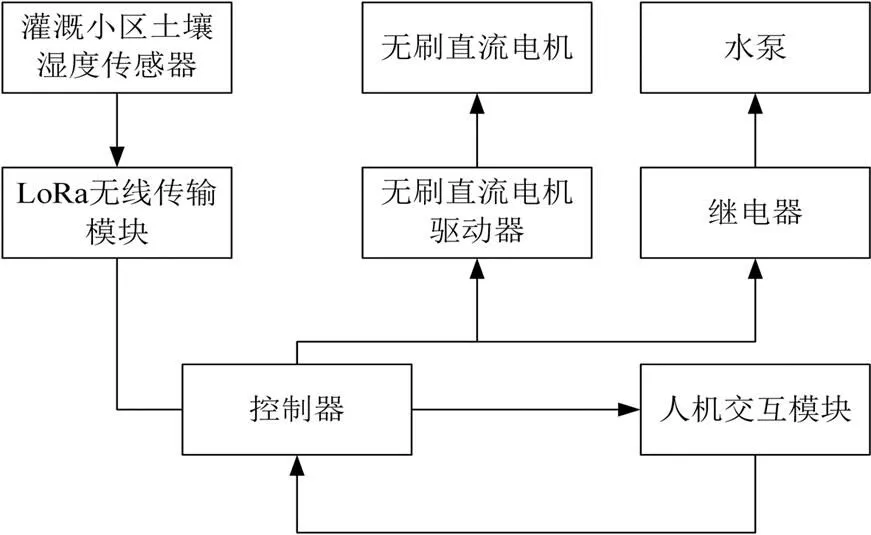
图1 智能灌溉控制系统框架
1.3 灌溉决策指标
在土壤—植物—大气连续体(SPAC系统)中,用于作物缺水诊断和灌溉决策的方法有3种[13-14]:①根据土壤湿度确定灌水量,需同时掌握作物适宜的水分上下限、土壤体积质量、土壤计划湿润层深度。②根据作物对水分亏缺的生理反应确定是否需要灌溉,具体指标包括茎/叶水势、茎流变化、作物冠层温度等。③根据光照强度、空气温度、风速等气象因子计算作物的潜在蒸散量来确定灌溉的时间和需水量。其中,根据土壤湿度确定灌水量是一种简便、高效、可推广的方式。土壤湿度偏差反映了当前的土壤状况,而土壤湿度偏差变化率反映了土壤水分损失的快慢,土壤湿度偏差变化率是土壤水分的田间蒸发、渗漏和作物蒸腾共同作用的体现,采用土壤湿度偏差和土壤湿度偏差变化率作为指标,简化了土壤水分的田间蒸发、渗漏和作物蒸腾的计算。土壤水分适宜下限也称灌溉起点,是适合作物生长发育的最低土壤含水率;土壤水分上限值也称灌溉终点,二者共同决定了土壤含水率的适宜范围,在此范围内对作物进行灌溉,能保证作物得到最好的生长发育,同时避免了土壤水分发生深层渗漏。
作物1次灌水量的计算公式为:

式中:为1次灌水量(mm);为土壤计划湿润层深度(m);为灌溉土壤湿润比(%),喷灌条件下=100;max为按体积比计算的适宜土壤含水率上限(%);min为按体积比计算的适宜土壤含水率下限(%);为灌溉水利用系数,喷灌为0.7~0.8。
1.4 精准灌溉控制策略
1.4.1 模糊控制器设计
模糊控制器(FC)采用MATLAB的模糊逻辑工具箱进行设计,模糊控制结构如图2所示。选择土壤湿度偏差和土壤湿度偏差变化率作为系统的输入变量,桁架车牵引速度为输出变量。土壤湿度偏差由土壤湿度设定值0与时刻的实际检测值()构成:

偏差变化率由当前时刻土壤湿度实际检测值()与前一时刻的实际检测值(-1)构成:

以淮北地区大豆的灌溉规律[15]为例,淮北平原多为壤土,田间持水率为25%,大豆各生育阶段土壤含水率的下限为田间持水率的70%,实际检测土壤湿度距田间持水率的偏差在10%以内;以日为基本单位,土壤湿度偏差变化率的绝对值在5%以内;通过式(1)计算大豆1次灌水量最大值为40 mm,拟选用江苏华源生产的JP65/D型卷盘式喷灌机,搭配26 m宽的桁架车,有效喷射直径为30 m,PE管长300 m,水泵流量45 m3/h,通过计算,卷盘式喷灌机桁架车牵引速度设定在30~70 m/h。

图2 模糊控制系统结构
设置土壤湿度偏差和偏差变化率的基本论域分别为[0,10%]和[0,5%],将和经模糊化后分别得到模糊变量和,其中模糊变量和的模糊子集均为{VL,LO,MD,HI,VH},和的模糊论域均为{0,1,2,3,4},则量化因子e=40,ec=80。设置输出量基本论域为[30,70],模糊变量的模糊子集为{VL,LO,MD,HI,VH},模糊论域为{3,4,5,6,7},则比例因子u=10。土壤湿度偏差、土壤湿度偏差变化率和桁架车牵引速度均为三角形隶属函数。
1.4.2 模糊控制规则
模糊控制系统采用2个输入参数和1个输出参数的Mamdani型控制形式,解模糊采用重心法。为简化推理过程,根据土壤湿度偏差划分为5个语言变量,根据土壤湿度偏差变化率划分为5个语言变量,以及根据桁架车牵引速度划分为5个语言变量。根据灌溉系统的灌溉原则,当土壤湿度偏差和土壤湿度偏差变化率较大时,喷灌机桁架车牵引速度较慢,可以增加灌水量;当土壤湿度偏差和土壤湿度偏差变化率较小时,喷灌机桁架车牵引速度较快,可以减少灌水量,从而使作物在适宜的土壤湿度环境下生长。本文控制规则的结构为“If A and B, then C”,模糊控制规则如表1所示。

表1 模糊控制规则
如图3所示,土壤湿度偏差和土壤湿度偏差变化率同时决定灌水量。当和均较小时,卷盘式喷灌机桁架车牵引速度则较大,灌水量较小;较大时说明作物严重缺水,而较大则说明土壤水分损失较快,因此较慢,灌水量较大。

图3 Surface输出结果
2 仿真与结果分析
运用MATLAB语言的仿真软件Simulink对模糊控制器进行仿真。进入Simulink环境中,在新建文件中按图4所示的控制方案拖入模块,将FIS结构文件嵌入到模糊逻辑控制器中,设定输入变量、量化因子、比例因子等,完成模糊控制灌溉的仿真系统。
输入变量为土壤湿度偏差,为一段时间内的土壤湿度偏差变化率,通过将量化因子e和ec传送到模糊控制器中,模糊控制器根据偏差和偏差变化率进行模糊推理,输出一个模糊值,模糊值经过比例因子u进行运算输出一个清晰值,这个值就是系统设定的桁架车牵引速度。设定此次采集的土壤湿度偏差为5%,土壤偏差变化率为2%,系统输出桁架车牵引速度为50 m/h,通过计算可得喷灌强度为30 mm,基本满足作物用水需求。系统的仿真曲线如图5所示。

图4 模糊控制器仿真系统

图5 系统仿真效果
总的来说,根据土壤湿度传感器检测的土壤湿度,通过LoRa无线传输模块传输到控制器,卷盘式喷灌机可以做到自动设定桁架车的牵引速度。将模糊控制理论应用于卷盘式喷灌机控制系统中,根据制定好的模糊规则,确保灌水量不超过土壤湿润层上限,可有效防止灌溉水发生深层渗漏,对卷盘式喷灌机智能灌溉的实现、控制系统的优化提供了一定参考。
3 讨 论
目前市面上的卷盘式喷灌机多采用水涡轮驱动,这往往需要水源有较高的压力,不仅如此,水涡轮驱动的卷盘式喷灌机喷灌强度和牵引速度之间的关系并不是简单的线性关系,这导致无法对作物进行精准灌溉。其次,作物不同生长期的最佳土壤湿度不同,传统灌溉方式往往根据经验来决定灌水量,容易造成灌溉不足或过度灌溉,不仅不利于作物生长,还造成了水资源的浪费。基于模糊控制理论的卷盘式喷灌机采用无刷直流电机驱动,不仅减小了水源压力,在泵流量一定的情况下,可以通过改变电机转速控制喷灌机桁架车牵引速度,进而控制灌水量。根据土壤湿度偏差和土壤湿度偏差变化率,结合模糊控制技术来决策作物的适宜灌水量,更加符合作物实际需水情况,同时在作物不同生长期调用不同的灌溉决策模块,保证了灌溉的精准性[16-17]。
灌溉决策需要与灌溉系统相结合,以达到精准灌溉决策和智能控制的目的,由此才能真正体现决策的有效性和灌溉系统的实际价值。国外在大型喷灌机和精准灌溉方面逐渐形成了灌溉决策与控制系统的集成,但中国在这方面的发展较为缓慢,集成灌溉决策与智能控制的系统还不多[18]。本研究是集土壤湿度检测、灌溉决策、变速喷洒为一体的智能卷盘式喷灌机。在作物灌水量模型中,充分考虑作物的灌水量不仅与土壤湿度有关,而且与蒸发量、作物类型和生长阶段有密切的关系,尤其各因素对灌水量的影响是非线性、模糊和高耦合的,很难用精确的数学模型表达出来。模糊控制技术基于大量专家经验和长期灌溉实践,因而可以根据这些因素对灌水量影响的不同权重,建立作物灌水量模型。在大多数研究中,桁架车实际的牵引速度和设定的牵引速度有一定的误差。根据土壤湿度传感器检测土壤湿度计算灌水量的方法应用较为广泛,但是由于大田环境中种植面积广阔,如何埋设土壤湿度传感器,以便更好地监测土壤湿度,以及土壤湿度传感器的埋设数量等问题还未能得到很好的解决[19-20]。如何针对不同区域、不同作物制定合理的模糊规则,以及在模糊推理系统中如何对土壤湿度和土壤湿度变化率选择合适的权重使预测结果更为合理,需要未来的进一步研究。
4 结论
1)设计并实现了以STM32单片机为主控器的智能灌溉控制系统,可以对土壤湿度进行实时检测,通过无线传输协议将数据传送至单片机,通过人机交互界面,用户可以控制卷盘式喷灌机水泵的开启和卷盘的自动回收。
2)以土壤湿度偏差和土壤湿度偏差变化率作为输入变量,桁架车牵引速度作为输出变量,建立了卷盘式喷灌机智能灌溉模糊控制系统,仿真结果表明系统控制稳定性较好。
3)基于土壤湿度传感器采集的信息决策的卷盘式喷灌机桁架车的牵引速度,使卷盘式喷灌机的实际灌水量不超过其单次最大灌水量,有效防止了水资源浪费。
[1] 刘俊萍, 朱兴业, 袁寿其, 等. 中国农业节水喷微灌装备研究进展及发展趋势[J]. 排灌机械工程学报, 2022, 40(1): 87-96.
LIU Junping, ZHU Xingye, YUAN Shouqi, et al. Research and development trend of agricultural water-saving sprinkler and micro-irrigation equipment in China[J]. Journal of Drainage and Irrigation Machinery Engineering, 2022, 40(1): 87-96.
[2] 李仰斌, 刘俊萍. 中国节水灌溉装备与技术发展展望[J]. 排灌机械工程学报, 2020, 38(7): 738-742.
LI Yangbin, LIU Junping. Prospects for development of water-saving irrigation equipment and technology in China[J]. Journal of Drainage and Irrigation Machinery Engineering, 2020, 38(7): 738-742.
[3] 索滢, 孟彤彤, 马海峰, 等. 水联网智慧灌区节水灌溉技术综合水效率评价研究[J]. 灌溉排水学报, 2021, 40(7): 138-144.
SUO Ying, MENG Tongtong, MA Haifeng, et al. A Comprehensive Evaluation System for Water-saving Irrigation Projects[J]. Journal of Irrigation and Drainage, 2021, 40(7): 138-144.
[4] 刘俊萍, 李滔, 张前. 流道结构对低压旋转式喷头水力性能影响试验研究[J]. 排灌机械工程学报, 2021, 39(3), 312-317.
LIU Junping, LI Tao, ZHANG Qian. Experimental study on influence of flow channel structure on hydraulic performance of low-pressure rotary sprinkle[J]. Journal of Drainage and Irrigation Machinery Engineering, 2021, 39(3): 312-317.
[5] 朱兴业, 张爱英, 张林国, 等. 低压雾化喷头雾化性能试验[J]. 排灌机械工程学报, 2021, 39(2): 210-216.
ZHU Xingye, ZHANG Aiying, ZHANG Linguo, et al. Research on atomization performance of low-pressure atomization nozzle[J]. Journal of Drainage and Irrigation Machinery Engineering, 2021, 39(2): 210-216.
[6] 顾哲, 袁寿其, 汤玲迪, 等. 卷盘式喷灌机太阳能智能驱动控制系统[J].排灌机械工程学报, 2018, 36(10): 969-974.
GU Zhe, YUAN Shouqi, TANG Lingdi, etal. Intelligent solar drive control system of hose reel irrigator[J]. Journal of Drainage and Irrigation Machinery Engineering, 2018, 36(10): 969-974.
[7] 王海华, 付强, 孟繁佳, 等. 模糊与PI分段调控肥液EC的优化设计与试验[J]. 农业工程学报, 2016, 32(15): 110-116.
WANG Haihua, FU Qiang, MENG Fanjia, et al. Optimal design and experiment of fertilizer EC regulation based on subsection control algorithm of fuzzy and PI[J]. Transactions of the Chinese Society of Agricultural Engineering, 2016, 32(15): 110-116.
[8] 吴兴利, 崔世钢, 何林, 等. 基于模糊控制的智能植物滴灌装置设计[J]. 灌溉排水学报, 2018, 37(6): 60-64.
WU Xingli, CUI Shigang, HE Lin, et al. Designing smart drip irrigation device using the fuzzy control system[J]. Journal of Irrigation and Drainage, 2018, 37(6): 60-64.
[9] 刘洪静, 李黎, 高金辉. 基于模糊PID控制的节水灌溉智能控制系统设计[J]. 节水灌溉, 2020(2): 88-91, 95.
LIU Hongjing, LI Li, GAO Jinhui. Design of water-saving irrigation intelligent control system based on fuzzy-PID control[J]. Water Saving Irrigation, 2020(2): 88-91, 95.
[10] 刘斌, 谢煜, 孙艺哲, 等. 基于 Smith 预估模糊控制的温室灌溉决策系统设计[J]. 中国农机化学报, 2019, 40(8): 149-153.
LIU Bin, XIE Yu, SUN Yizhe, et al. Design of greenhouse irrigation decision system based on smith fuzzy controller[J]. Journal of Chinese Agricultural Mechanization, 2019, 40(8): 149-153.
[11] SUN Fengshen, MA Weishun, LI Heju, et al. Research on water-fertilizer integrated technology based on neural network prediction and fuzzy control[J]. Earth and Environmental Science, 2018, 170(3): 160-173.
[12] ABDELOUAHED Selmani, MOHAMED Outanoute, HASSAN Oubehar, et al. An embedded solar-powered irrigation system based on a cascaded fuzzy logic controller[J]. Asian Journal of Control, 2019, 21(4): 1 941-1 951.
[13] 韩文霆, 张立元, 牛亚晓, 等. 无人机遥感技术在精量灌溉中应用的研究进展[J]. 农业机械学报, 2020, 51(2): 1-14.
HAN Wenting, ZHANG Liyuan, NIU Xiaoya, et al. Review on UAV Remote Sensing Application in Precision Irrigation[J]. Transactions of the Chinese Society of Agricultural Machinery, 2020, 51(2): 1-14.
[14] 刘小华, 魏炳乾, 吴立峰, 等. 4种人工智能模型在江西省参考作物蒸散量计算中的适用性[J]. 排灌机械工程学报, 2020, 38(1): 102-108.
LIU Xiaohua, WEI Bingqian, WU Lifeng, et al. Applicability of four kinds of artificial intelligent models on prediction of reference crop evapotranspiration in Jiangxi province[J]. Journal of Drainage and Irrigation Machinery Engineering, 2020, 38(1): 102-108.
[15] 崔毅, 金菊良, 蒋尚明, 等.不同受旱胁迫下大豆蒸发蒸腾与地上部生长物质之间响应关系研究[J]. 灾害学, 2021, 36(4): 79-87.
CUI Yi, JIN Juliang, JIANG Shangming, et al. Study on response relationship between evapotranspiration and aboveground growth matter of soybean under different drought stress[J]. Journal of Catastrophology, 2021, 36(4): 79-87.
[16] 赵伟霞, 李久生, 杨汝苗, 等. 基于土壤水分空间变异的变速喷洒作物产量及节水效果[J]. 农业工程学报, 2017, 33(2):1-7.
ZHAO Weixia, LI Jiusheng, YANG Rumiao, et al. Yields and water-saving effects of crops as affected by variable rate irrigation management based on soil water spatial variation[J]. Transactions of the Chinese Society of Agricultural Engineering, 2017, 33(2): 1-7.
[17] 张晴, 刘俊萍, 袁寿其, 等. 水药一体化喷头结构设计与水力性能试验[J]. 排灌机械工程学报, 2022, 40(1): 102-108.
ZHANG Qing, LIU Junping, YUAN Shouqi, et al. Structure design and hydraulic performance test of water and pesticide integrated sprinkler[J]. Journal of Drainage and Irrigation Machinery Engineering, 2022, 40(1): 102-108.
[18] 顾哲, 袁寿其, 齐志明, 等. 基于ET和水量平衡的日光温室实时精准灌溉决策及控制系统[J]. 农业工程学报, 2018, 34(23): 101-108.
GU Zhe, YUAN Shouqi, QI Zhiming, et al. Real-time precise irrigation scheduling and control system in solar greenhouse based on ET and water balance[J]. Transactions of the Chinese Society of Agricultural Engineering, 2018, 34(23): 101-108.
[19] 何淑林, 刘慧敏, 金立强, 等. 基于神经网络算法的果树需水预测研究[J]. 灌溉排水学报, 2022, 41(1): 19-24.
HE Shulin, LIU Huimin, JIN Liqiang, et al. Calculating demands of fruit trees for water using neural network algorithm[J]. Journal of Irrigation and Drainage, 2022, 41(1): 19-24.
[20] 许正典, 李红, 向清江, 等. 20PY2摇臂喷头掺气情况下的低压喷灌效果[J]. 排灌机械工程学报, 2022, 40(1): 74-79.
XU Zhengdian, LI Hong, XIANG Qingjiang, et al. Effect on combination irrigation of low pressure 20PY2 impact sprinkler with and without aeration[J]. Journal of Drainage and Irrigation Machinery Engineering, 2022, 40(1): 74-79.
Fuzzy Control on the Performance of Hose-reel Sprinkler Irrigation System
GUO Yijian1, ZHU Xingye1*, CHEN Shengyuan2, LIU Junping1, LI Wei1
(1. Research Center of Fluid Machinery Engineering and Technology, Jiangsu University, Zhenjiang 212013, China;2. Institute of Product Quality Inspection of Wenling City, Wenling 317599, China)
【Objective】Improving the performance of irrigation systems is critical to improving their operation and water use efficiency. The aim of this paper is to present a new control method. 【Method】The intelligent control was based on the hose-reel irrigators system. It was realized by the fuzzy control theory and method, with soil moisture deviation and its temporal change taken as the input variables and the sprayer cart traction speed as the output. Fuzzy value of the traction speed was obtained by fuzzy-processing the two input-variables. It then underwent a clear-processing to obtain the real traction speed for operating the irrigation system by passing it to the driving motor. 【Result】When soil moisture deviation and its temporal change were large, the traction speed of the sprayer cart was slow in order to increase the irrigation amount. In contrast, decrease in soil moisture deviation and its temporal change accelerated the traction speed of the sprayer cart to reduce the irrigation intensity.【Conclusion】Based on soil moisture deviation and its temporal change, the proposed control system can change the traction speed of the hose-reel irrigators to adjust irrigation intensity, achieving precision irrigation.
hose reel irrigator; intelligent irrigation; fuzzy control
1672 - 3317(2022)07 - 0065 - 06
TV93
A
10.13522/j.cnki.ggps.2021631
郭依剑, 朱兴业, 陈盛源, 等. 卷盘式喷灌机智能灌溉模糊控制技术研究[J]. 灌溉排水学报, 2022, 41(7): 65-69, 95.
GUO Yijian, ZHU Xingye, CHEN Shengyuan, et al. Fuzzy Control on the Performance of Hose-reel Sprinkler Irrigation System[J]. Journal of Irrigation and Drainage, 2022, 41(7): 65-69, 95.
2021-12-19
江苏省重点研发计划项目(现代农业)(BE2021341);江苏省农业科技自主创新资金项目(CX(20)2037);江苏大学农业装备学部项目(NZXB20210101);江苏省研究生科研与实践创新计划项目(KYCX22_3672)
郭依剑(1997-),男。硕士研究生。主要从事节水灌溉装备研究。E-mail: 425319433@qq.com
朱兴业(1982-),男。研究员。主要从事流体机械及排灌装备研究。E-mail: zhuxy@ujs.edu.cn
责任编辑:韩 洋
猜你喜欢
建材发展导向(2022年10期)2022-07-28
农业灾害研究(2022年1期)2022-05-07
——以红沙泉矿区为例
煤炭科学技术(2022年2期)2022-03-26
交通科技与管理(2021年13期)2021-09-10
初中生世界·九年级(2020年9期)2020-09-21
中国建筑金属结构(2018年4期)2018-05-23
新农业(2017年11期)2018-03-07
环球人文地理·评论版(2017年4期)2017-07-16
东方教育(2016年9期)2017-01-17
软件导刊(2015年1期)2015-03-02