
满足线性二次型调节器性能指标的群系统编队跟踪问题优化控制方法
2022-08-06 05:25:32张庆杰陈宏伟
国防科技大学学报 2022年4期
王 琳,张庆杰,陈宏伟
(空军航空大学, 吉林 长春 130022)
群系统编队控制问题[1-2]越来越受到学者的关注。传统的编队控制方法存在通信代价大,以及易单点失效导致整体瘫痪的缺点。伴随一致性理论的出现,为编队控制问题提供了新的解决思路。文献[3]证明了一致性编队控制方法可以解决编队控制问题,且优于传统编队控制方法。
文献[4]解决了一阶积分特性的群系统模型下的编队跟踪问题。文献[5]解决了二阶积分特性模型下的编队跟踪问题。文献[6]在假设含有有向生成树,且领导者须作为根节点的条件下,解决了二阶积分特性模型下的编队跟踪问题。文献[7]在通信拓扑图为无向图时,解决了编队控制问题。文献[8]在通信拓扑图为有向图时,解决了时变编队问题。文献[9]在通信拓扑图为有向图时,利用一致性方法,解决了无人机编队问题。文献[10]解决了高阶积分特性的群系统模型下的编队跟踪问题。文献[11]解决了最小化线性二次型调节器(linear quadratic regulator,LQR)性能指标的一阶积分特性模型下的编队问题。文献[12]研究了系统矩阵正定时领导者跟随者系统跟踪最优控制。文献[13]利用逆优化方法设计时变编队跟踪协议,给出群系统实现时变编队跟踪的可行性条件的证明,并保证所提出的控制策略满足LQR性能指标。
文献[4-6]的控制方法只适用于低阶积分特性模型,模型条件过于苛刻。文献[6]的控制方法针对的是领导者跟随者系统,其拓扑条件要求含有有向生成树且领导者须作为根节点,适用范围较窄。文献[7]要求通信拓扑图切换时均为无向图,针对有向拓扑条件,文献[7]的结论并不适用。文献[8-9]的通信拓扑图虽为有向图,但是解决的是编队形成问题,其结论不适用于编队跟踪问题。文献[10]考虑了高阶积分特性的编队跟踪问题,但是没有涉及编队跟踪性能方面。文献[11]考虑了最小化LQR性能指标的编队控制问题,针对的是低阶模型,且没有涉及跟踪轨迹方面。文献[12]对领导者跟随者系统达到跟踪最优控制的条件较为苛刻,要求系统矩阵正定,且不考虑时变编队和轨迹跟踪,应用范围较窄。文献[13]虽然在通信拓扑图为有向图时解决了编队跟踪问题,但跟踪轨迹的约束性强,其动态特性表达式要满足特定条件,不具有普遍性。在通信拓扑图为一般有向图且满足LQR性能指标的条件下,保证群系统编队跟踪的控制协议设计方法还比较少。
本文主要研究了一种针对群系统满足LQR指标的编队跟踪优化方法。
符号RN×N表示N×N维矩阵。IN是N×N维单位矩阵。A>B意味着A-B是正定的,A≥B意味着A-B是半正定的。A⊗B表示矩阵A和矩阵B的克罗内克积。
1 图论知识和相关引理
1.1 图论知识
图G=(V,ε,W)中V是节点集合,ε是边集合,W是邻接矩阵。其中,V={ξ1,ξ2,…,ξN},ε={(ξi,ξj) ∶ξi,ξj∈V},W=[wij]∈RN×N。用eij=(ξi,ξj)表示节点ξi延伸到节点ξj的边。如果对任意的eij都存在eji∈ε,则图G是无向图。其他情况下,称图G是有向图。用wij表示边eji的连接权重。当wij>0,节点ξi可以接收来自节点ξj的信息,而对i={1,2,…,N},有wij=0。如果存在一个节点ξi,可以传递信息到其他任意节点,则称图G含有一个有向生成树。定义节点ξi的邻居节点集合为Ni={ξj∈V∶(ξj,ξi)∈ε}。定义节点ξi的入度为degin(ξi),则图的入度矩阵为D=diag{degin(ξ1),degin(ξ2),…,degin(ξN)}。通常用L=D-W表示图G的拉普拉斯矩阵。
1.2 相关引理
引理1[14]有向图含有向生成树,则0是拉普拉斯矩阵L的单个特征值且L1=0,其他非零特征值均具有正实部。如果无向图含有向生成树,其他非零特征值均为正数。
引理2[15]如果矩阵W∈RN×N每一特征根均有正的实部,存在正定矩阵Q>0使得WTQ+QW>0。
引理3[16]对于矩阵IN+L,L是图G的拉普拉斯矩阵,存在正定矩阵Q,使得
(IN+L)TQ+Q(IN+L)>2αQ
其中,0<α<1。
引理4[17]对于系统

如果:
1)存在正定函数V(x,t);

则平衡状态xe=0是渐近稳定的。
引理5[18]考虑连续时间线性定常系统

选取二次型性能指标函数

其中,A和B为输入矩阵,(A,B)可控且B是列满秩矩阵。x∈Rn是第i个主体的状态,u∈Rm是控制输入。
选取加权阵Q>0和R>0,控制变量u=Kx,其中,K=-R-1BTP且P>0满足里卡蒂方程ATP+PA+Q-PBR-1BTP=0。则反馈增益矩阵K使二次型性能指标函数J最小化且矩阵-KB是可对角化且正定的。
引理6[19]对于逆最优问题,反馈增益矩阵K=-R-1BTP对于二次型性能指标函数J是最优的且P>0满足里卡蒂方程
ATP+PA+Q-PBR-1BTP=0
(Q>0和R>0)的条件是:
1)-KB是可对角化且正定的,而且满足rank(KB)=rank(K)。即存在对称矩阵P>0和R>0使得K=-R-1BTP。
2)K稳定到矩阵P的核空间。
2 问题描述
2.1 编队跟踪问题
考虑群系统满足如式(1)所示动态特性。
(1)
式中,ξi(t)∈Rl是第i个主体的状态,ui(t)∈Rm是第i个主体的控制输入。
假设1B是列满秩矩阵,通信拓扑图G包含有向生成树。

定义1在控制输入ui(t)下,群系统式(1)的主体状态能够满足
(2)
式中,r(t)∈Rl为给定的轨迹,则称群系统式(1)能够形成时变编队h(t),同时可以跟踪轨迹r(t)。
2.2 控制协议框架
基于一致性理论,考虑如下编队控制协议:
ui(t)=ui1(t)+ui2(t)+ui3(t),i=1,2,…N
(3)
式中,ui1(t)为自身反馈控制输入,ui2(t)为辅助函数输入,ui3(t)为邻居反馈控制输入,其具体表达式为
(4)
其中,Ni表示拓扑图G第i个节点的邻居集合,K1和K2是待设计的增益矩阵,vi(t)∈Rm是辅助函数。
3 问题分析和协议设计
3.1 充分必要条件
由定义1可知,群系统式(1)的主体状态与相应的时变编队和轨迹的差值需要收敛到零,才能实现编队跟踪,这样对编队跟踪控制协议的设计会有一定的限制条件,定理1给出了控制协议框架下群系统实现编队跟踪的充要条件。
定理1有界初始条件下,群系统式(1)通过ui(t)的控制可以形成时变编队h(t)并跟踪轨迹r(t)的充分必要条件是:
1)对于控制函数vi(t)∈Rm有
(5)
2)如下系统是渐近稳定的
(6)

证明:将式(3)代入式(1),并令
得到群系统的闭环方程为
(IN⊗BK1)h(t)+(L⊗BK2)h(t)
(7)
式中,L为通信拓扑图G的拉普拉斯矩阵。令
ζi(t)=ξi(t)-hi(t)-r(t),i=1,2,…,N
则群系统式(7)可以转换为

(8)
(9)
且式(10)所示闭环系统是渐近稳定的,则群系统式(1)能够形成时变编队h(t),同时可以跟踪轨迹r(t)。由式(9)可得到定理1的条件1,由式(10)可得到定理1的条件2。根据上述线性变换的证明过程,条件1和条件2是充分必要条件。
(10)
□
注1:定理1的适用范围较广,不同于文献[20],除了考虑群系统实现时变编队,还加以考虑跟踪轨迹。其控制函数v(t)的引入是为了补偿时变编队h(t)和轨迹r(t)带来的多余项,将群系统式(1)转化为闭环自治系统,便于讨论系统的稳定性。其控制函数v(t)可以通过式(5)求解得到,条件1较易满足。而条件2可通过李雅普诺夫稳定性理论予以证明,在理论证明中,难点在于闭环系统式(6)中增益矩阵K1和K2的设计方法,下面定理2给出了增益矩阵的设计方法。
3.2 稳定性分析
定理2有界初始条件下,如果K=-R-1BTP,若K1=cK,K2=-cK,c是增益常数,群系统式(1)在编队跟踪控制协议式(4)下能够实现时变编队并跟踪轨迹。
证明:考虑分段连续的李雅普诺夫函数
V=ζT(t)(Qσ⊗P)ζ(t)
(11)
P是里卡蒂方程ATP+PA+Q-PBR-1BTP=0的正定解。V是连续的,对其求导并将式(6)、K1=cK、K2=-cK、K=-R-1BTP代入式(11)可得

cζT(t){[(IN+L)TQσ]⊗PBR-1BTP}ζ(t)-
cζT(t){[Qσ(IN+L)]⊗PBR-1BTP}ζ(t)
(12)
由引理3得
(IN+L)TQσ+Qσ(IN+Lσ(t))>2αQσ
(13)
则式(12)转换为
(14)
由里卡蒂方程可得
ATP+PA+Q-PBR-1BTP=0
(15)
则式(14)转换为
(16)

(17)

□
注2:由于跟踪控制协议式(4)包含了自身反馈控制输入,从式(12)~(16)判断,假设1并不是群系统实现时变编队和跟踪轨迹的必要条件,即使各主体之间不连通,时变编队和轨迹跟踪仍然可以实现。根据文献[16]可知,通信拓扑图中含有有向生成树,能够增强群系统的鲁棒性。
在实际应用中,往往还需要考虑系统能否满足某种性能指标,下面定理3给出了编队跟踪控制协议式(4)可以最小化LQR性能指标的充分条件。
3.3 最优性分析
考虑如下LQR性能指标:
(18)

定理3有界初始条件下,选取编队跟踪控制协议式(4)可以最小化LQR性能指标的充分条件是:矩阵IN+L是可对角化且正定的。
证明:令K1=cK,K2=-cK,K=-R-1BTP,代入式(10),得到全局误差动态特性

=IN⊗Aζ(t)+c(IN+L)⊗BKζ(t)
=IN⊗Aζ(t)+(IN⊗B)c(IN+L)⊗Kζ(t)
=IN⊗Aζ(t)+(IN⊗B)v
(19)
由引理5可知,矩阵-KB是可对角化且正定的,而且满足rank(KB)=rank(K),则有
rank{[c(IN+L)⊗K](IN⊗B)}
=rank[c(IN+L)]rank(KB)
=rank[c(IN+L)]rank(K)
=rank[c(IN+L)⊗K]
(20)


□

=-(IN⊗R)-1(IN⊗B)T(Lσ⊗P)
(21)


(22)

(23)

注4:在满足条件式(5)和闭环系统式(6)渐近稳定的情况下,编队跟踪控制协议式(4)可以使群系统形成指定时变编队并跟踪轨迹,但不一定可以最小化二次型性能指标,通信拓扑还需满足特定条件,即IN+L是可对角化且正定的,才可以实现最小化二次型性能指标。根据引理1,当拓扑图为无向图时,矩阵IN+L是实对称矩阵,必定可以对角化,且特征值都为正的实数,满足正定性。
注5:传统最小化性能指标的方法,是先选定加权阵,确定性能指标之后,得出控制输入的最优形式,进而决定控制协议的设计结构。而传统方法大都是针对低阶积分特性模型,如文献[11],或者不考虑时变编队和跟踪轨迹,如文献[12]。对于高阶群系统模型,考虑时变编队和跟踪轨迹的影响,选定性能指标之后,设计控制协议是十分困难的,基于此,本文设计的控制协议使得群系统转化为自治系统,通过变量代换,得到性能指标的加权阵,能够最小化性能指标。
4 数值仿真与分析
4.1 数值仿真条件
图1给出了各主体之间的拓扑图。可以看出,图1中的拓扑图G包含有向生成树,G相应的拉普拉斯矩阵为
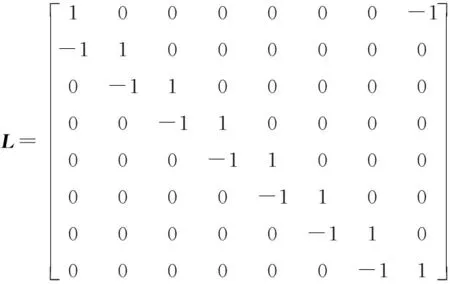

图1 群系统各主体之间的通信拓扑图Fig.1 Communication topologies between agents of swarm systems
基于多无人机侦察任务场景,无人机须从不同角度侦察目标,以及被侦察目标轨迹会发生变化,定义时变编队h(t)和轨迹r(t)分别为
其中,ω=0.25 rad/s。由式(5)可以得到控制函数v(t)。
当0≤t<30时,
当30≤t≤70时,


取α=0.5,得c=1。各主体的初始状态分别为:xi1(0)=4(δ-0.5),xi2(0)=3(δ-0.5),xi3(0)=2(δ-0.5)(i=1,2,…,8)。其中,δ为(0,1)之间的随机数,设置仿真时间70 s。
4.2 结果讨论与对比分析
4.2.1 结果讨论
图2给出了8个主体的状态在0.5 s、10 s、30 s、45 s、60 s和70 s时的状态演化过程和编队构型。在初始阶段,8个主体的构型为不规则图形,随着时间的推移,群系统的8个主体形成了指定的时变编队并可以保持稳定。
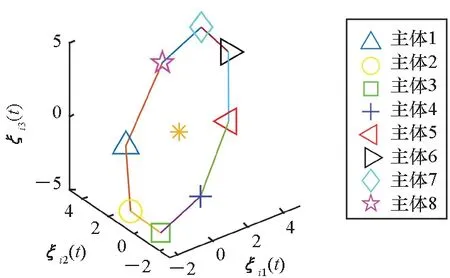
(a) t=0.5 s

(b) t=10 s
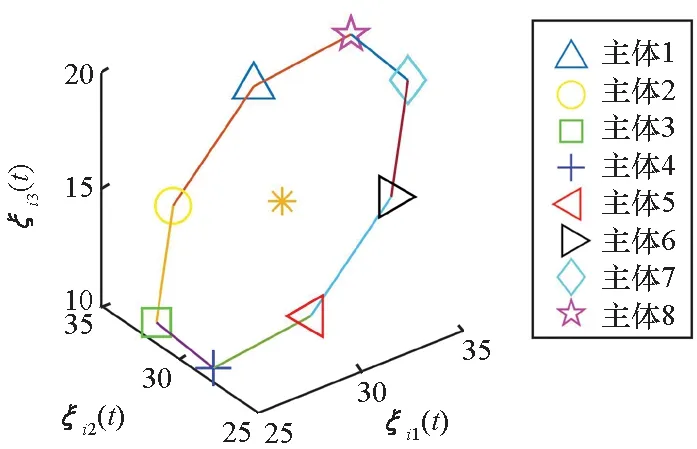
(c) t=30 s

(d) t=45 s

(e) t=60 s

(f) t=70 s图2 不同时刻群系统状态演化过程Fig.2 State evolution process of the swarm systems at different times
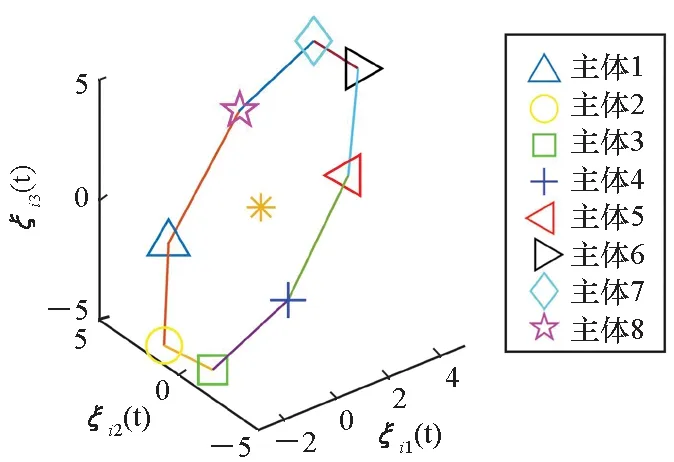
图3为20~30 s和50~60 s之间各主体的轨迹图,其中方框表示主体的起点,五角星表示主体的终点。在20~30 s和50~60 s的时间段里,8个主体已经形成了规则的构型,并可以跟踪预先设定的轨迹。当轨迹发生变化时,群系统可以保持对轨迹的跟踪且编队的构型并没有受到影响。
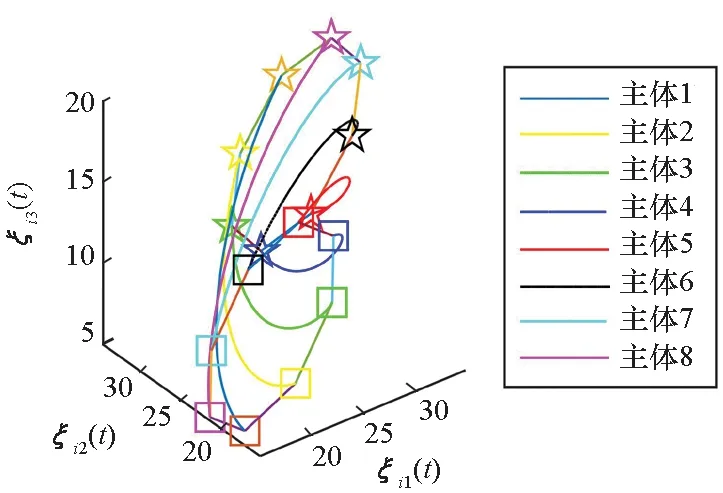
(a) 20~30 s
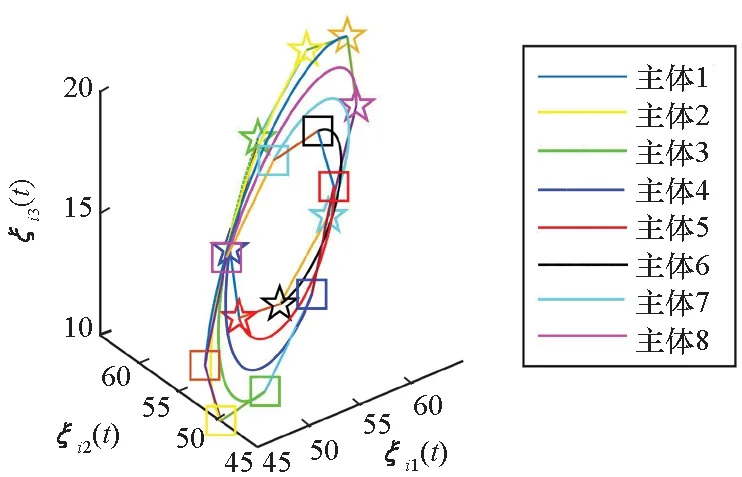
(b) 50~60 s图3 不同时间段的轨迹截图Fig.3 Snapshot of motion trajectories in different time
图4(a)~(c)分别给出了编队跟踪误差在3个不同方向上的差值曲线。从图中不难看出,不同方向上编队跟踪误差都可以趋于零。说明各主体的三个状态与编队和轨迹相应状态的差值趋于零,这也说明群系统形成了指定的时变编队,并可以保持稳定。
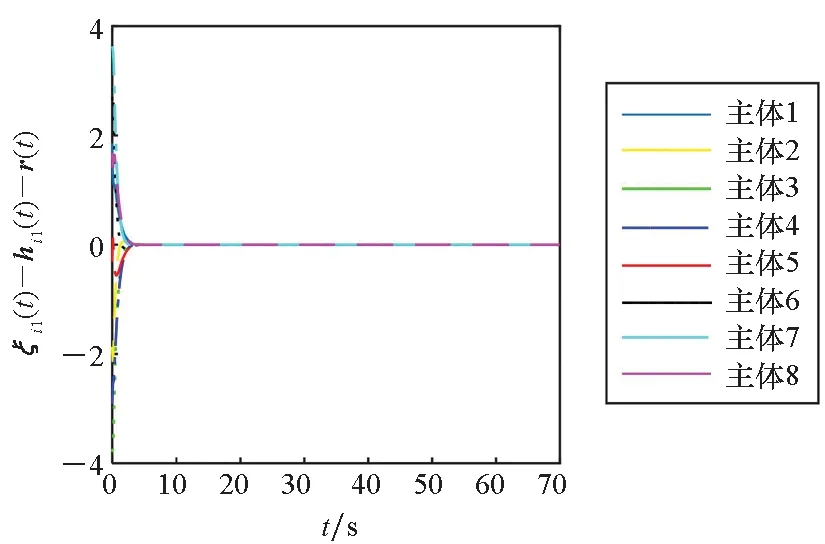
(a) ξi1(t)-hi1(t)-r(t)

(b) ξi2(t)-hi2(t)-r(t)
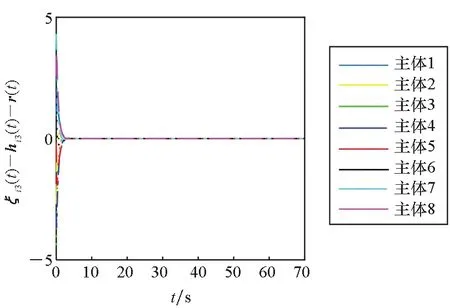
(c) ξi3(t)-hi3(t)-r(t)图4 3个不同方向上的编队跟踪误差Fig.4 Formation tracking errors in three different directions
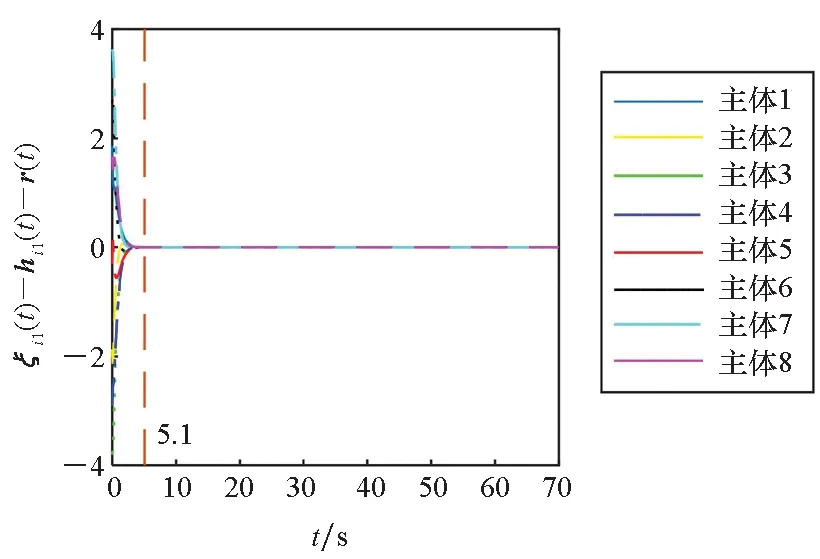
从增益常数c分析,随着增益常数c取值的不同,编队跟踪误差趋于零的时间长短不同,即群系统形成时变编队并跟踪轨迹的时间长短不同。以x方向为例,图5(a)~(c)分别给出了增益常数c在取值为0.6、1和2时的编队跟踪误差曲线。这里认为差值小于10-3时,编队跟踪误差趋于零。图中竖直虚线表示差值趋于零的时间。可以看出随着增益常数c的增大,编队跟踪误差趋于零的时间越短。图6(a)~(b)分别给出了增益常数c在取值为0.6和2时,8个主体的状态在0.5 s时的状态截图,与图2(a)中c取值为1对比,可以看出随着增益常数c的增大,8个主体的状态在0.5 s时的编队构型越规则,也说明8个主体的编队形成速度越快。

(a) c=0.6
(b) c=1

(c) c=2图5 ξi1(t)-hi1(t)-r(t)在不同取值c的误差曲线Fig.5 The error curves of ξi1(t)-hi1(t)-r(t) in different values of c

(a) t=0.5 s,c=0.6
(b) t=0.5 s,c=2图6 群系统状态在c不同取值时的截图Fig.6 Snapshot of states of the swarm systems in different values of c
注6:基于多无人机侦察任务场景,可以发现,当其中一个无人机可以感知到危险源时,需要联动整个无人机群系统突然改变方向。很明显这种情况下的无人机群系统不仅需要位置和速度的误差收敛于零,还要实现加速度的误差收敛于零,才可以实现更加精准的飞行。因此,针对高阶系统模型,设此仿真案例,以验证编队控制算法。
4.2.2 对比分析
为便于比较和考虑到控制协议最小化性能指标需要满足特定的拓扑条件,选取拓扑图为无向图,如图7所示。

图7 无向图Fig.7 Undirected graph
其他仿真条件采用本文的仿真条件。
从不同控制方法分析,编队跟踪误差趋于零的时间长短不同。以x方向为例,图8给出了文献[16]方法和本文方法下x方向的收敛时间。图中竖直虚线是增益常数c选取的边界,即参数c的选取要大于0.5。利用文献[16]方法得到的增益矩阵,使得编队跟踪误差趋于零的时间为6.3 s,而利用本文方法得到的增益矩阵,可以通过调节增益常数c,改变编队跟踪误差趋于零的快慢。当c取0.5时,收敛时间为6.3 s;当c取5时,收敛时间为2.3 s。从图中可以看出,随着增益常数c的增大,收敛时间从6.3 s减小至2.3 s,而相应的最小性能指标J*越来越大,在实际应用中,可以综合考虑收敛时间与性能指标对系统的影响,适当选取增益常数c。在实际应用中,基于多无人机侦察任务场景,当一个无人机收到被侦察目标的轨迹信息,需要无人机群系统迅速做出反应,为达到良好的侦察效果,无人机群系统需要迅速形成编队队形实施侦察任务,映射到仿真案例中,调节增益常数c的大小以改变编队的形成速度,从而适应侦察任务的需要。
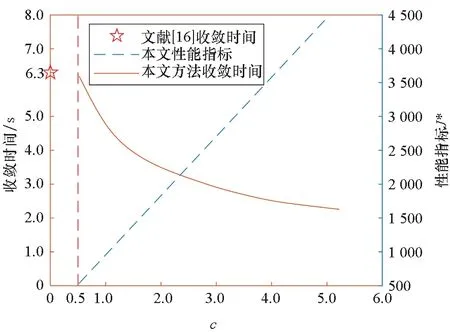
图8 收敛时间和性能指标与参数c的关系Fig.8 Relationship between convergence time performance index and the parameter c
5 结论
本文提出了一种满足LQR性能指标的群系统编队跟踪优化方法,结论为:
1)建立了编队跟踪问题数学描述,设计分布式控制协议框架,给出了编队跟踪的充要条件。
2)通过变量代换,将群系统编队跟踪控制问题转化为闭环系统的稳定性问题,并利用李雅普诺夫第二方法,分析闭环系统的稳定性。
3)给出了满足LQR性能指标下通信拓扑条件。
猜你喜欢
电子设计工程(2023年2期)2023-01-24 12:52:12
数学年刊A辑(中文版)(2022年1期)2022-08-20 08:50:22
石油沥青(2021年1期)2021-04-13 01:31:08
华东师范大学学报(自然科学版)(2020年1期)2020-03-16 03:14:55
通信技术(2016年12期)2016-12-28 10:35:10
科技与创新(2016年17期)2016-11-04 10:04:24
制冷技术(2016年4期)2016-08-21 12:40:30
测绘科学与工程(2016年4期)2016-04-17 06:51:14
深圳大学学报(理工版)(2015年5期)2015-02-28 16:21:22
电测与仪表(2014年16期)2014-04-22 05:20:20
