基于Pre-Scan的自动驾驶车辆AEB试验设计
2022-08-04 09:27杨建军倪兴泷邹晋彬邱宇奇彭忆强董大伟
实验室研究与探索 2022年3期
杨建军, 倪兴泷, 邹晋彬, 邱宇奇, 彭忆强, 董大伟
(1.西华大学 汽车与交通学院,成都 610039;2.西南交通大学 机械工程学院,成都 610031)
0 引 言
伴随当今世界智能交通的兴起,自动驾驶技术开始飞速发展,智能汽车产业已成为各国发展的战略方向[1]。为使我国智能汽车产业能加快推进、创新发展,国家各部委也在积极推动全面建成中国标准智能汽车体系[2]。
但无论是完全自动驾驶汽车,还是驾驶员操控汽车,如何尽可能的减少甚至避免交通事故的发生一直是困扰全世界的一个难题。据统计全世界每年死于交通事故高达135万人,而其中大部分事故的主要原因都是由于驾驶员判断失误和疲劳驾驶造成的,反映在汽车行驶过程中的最直接表现则是车速过快,未能在事故发生前将车辆刹死、停住[3]。目前,在大多数中高端车辆上已经搭载了自动紧急制动系统(Autonomous Emergency Braking System, AEB)以降低驾驶员因素对交通事故的影响,提高汽车在行驶过程中的安全性。欧盟新车安全评鉴协会(Euro-NCAP)研究指出,由驾驶员注意力分散而引发的交通安全事故占90%,而搭载了AEB系统的车辆事故发生率则可以减少约27%[4-6]。
随着越来越多的AEB系统在不同车型上开始配备,有必要开展AEB试验对所搭载AEB系统的可靠性与能效性进行测试。全球各大新车碰撞测试组织的方法大多是采用在封闭道路情况下,假人与新车进行碰撞试验以测试其搭载的AEB系统,具有一定的危险性且成本较高,并且难以随时开展试验[7]。
作为典型的工科专业,车辆类专业的特点是紧密联系行业热点和发展方向,其工程应用特点十分明显。随着智能汽车的发展,如何在车辆专业中将智能车辆技术引入教学并针对性的开展试验项目,这也是车辆类专业本科教学的难点[8]。针对以上情况,本文利用Pre-Scan自动驾驶仿真软件设计了自动驾驶车辆AEB系统仿真试验,通过对实际案例的试验设计和仿真结果分析,讨论如何利用Pre-Scan进行自动驾驶车辆AEB系统试验与开发。
1 自动驾驶车辆AEB试验的方案设计
1.1 AEB试验目的
目前,国内AEB系统开发大多还是按照中国新车评价规程(C-NCAP)来研究的,其开发过程主要包括以下3个部分:道路测试、仿真测试和实车功能测试[9-10]。在开发过程中不仅需要实车与专业场地,而且周期长,成本高,甚至具有一定的危险性。因此,利用Pre-Scan 对自动驾驶车辆AEB试验设计,搭建道路测试所需要的AEB触发场景,并提取分析其中的误触发场景。同时对AEB模型参数进行实时在线调整,使其避免误触发场景,为实车功能测试提供参考,缩短开发周期,减少开发成本,降低开发试验中的危险程度,并通过C-NCAP测试[11]。
1.2 仿真软件的可信度确定
Pre-Scan以物理模型为基础,基于Matlab/Simulink的汽车驾驶仿真平台。其支持模型在环(MIL),实时软件在环(SIL),硬件在环(HIL)等多种使用模式,在汽车高级驾驶辅助系统(ADAS)和无人自动驾驶系统的开发中具有较大影响力[12-14]。Pre-Scan在世界范围内的自动驾驶车辆技术研究中被广泛采用,使用它进行自动驾驶系统开发已经成为较成熟的方法。
1.3 仿真试验的技术路线
使用Pre-Scan软件对自动驾驶车辆进行AEB试验,需要确定的是搭建符合实际情况的虚拟道路测试场景。通过分析来自国家车辆事故深度调查体系(National Automobile Accident In-depth Investigation System, NAIS)数据库提供的事故车辆与场景资料,包括事故现场CAD图以及警方提供的道路交通事故现场图与事故监控视频,作为衡量Pre-Scan软件搭建道路测试场景正确性的主要依据。若在搭建的测试场景中,测试车车速、事故发生前各参与方的相对位置以及道路环境均与事故发生前的场景一致,且仿真结果车辆碰撞位置与监控视频一致,则其搭建的测试场景符合事故发生时的实际场景。搭建AEB测试场景模型主要包括建模前的分析、模型建立、结果输出3部分,如图1所示。

图1 AEB试验流程图
建模前应对初始材料进行深度分析,得到事故发生前的真实环境。建模时应主要考虑搭建的测试场景是否符合该起交通事故的真实场景特征,并添加相应的AEB算法,不断调整参数,最终将仿真结果输出。本文通过一起实际发生的交通事故作为案例,介绍基于Pre-Scan的自动驾驶车辆AEB试验设计的具体操作流程。
2 试验仿真步骤
2.1 试验案例
2019年7月某日,在一条直行道路近Y形路口处(干燥沥青路面),一辆三厢轿车与一横穿马路的行人发生交通事故。发生碰撞前,该行人已看见事故轿车,但并未选择让行而是小跑强行通过。轿车驾驶员看见该行人时已来不及在碰撞前将汽车减速刹停,导致发生交通事故。事故发生时,轿车左车灯部分与行人腰部位置发生碰撞,之后轿车向前急刹,停在行驶方向右侧车道,行人被撞后俯卧在轿车后方。交警手绘事故现场图如图2所示。
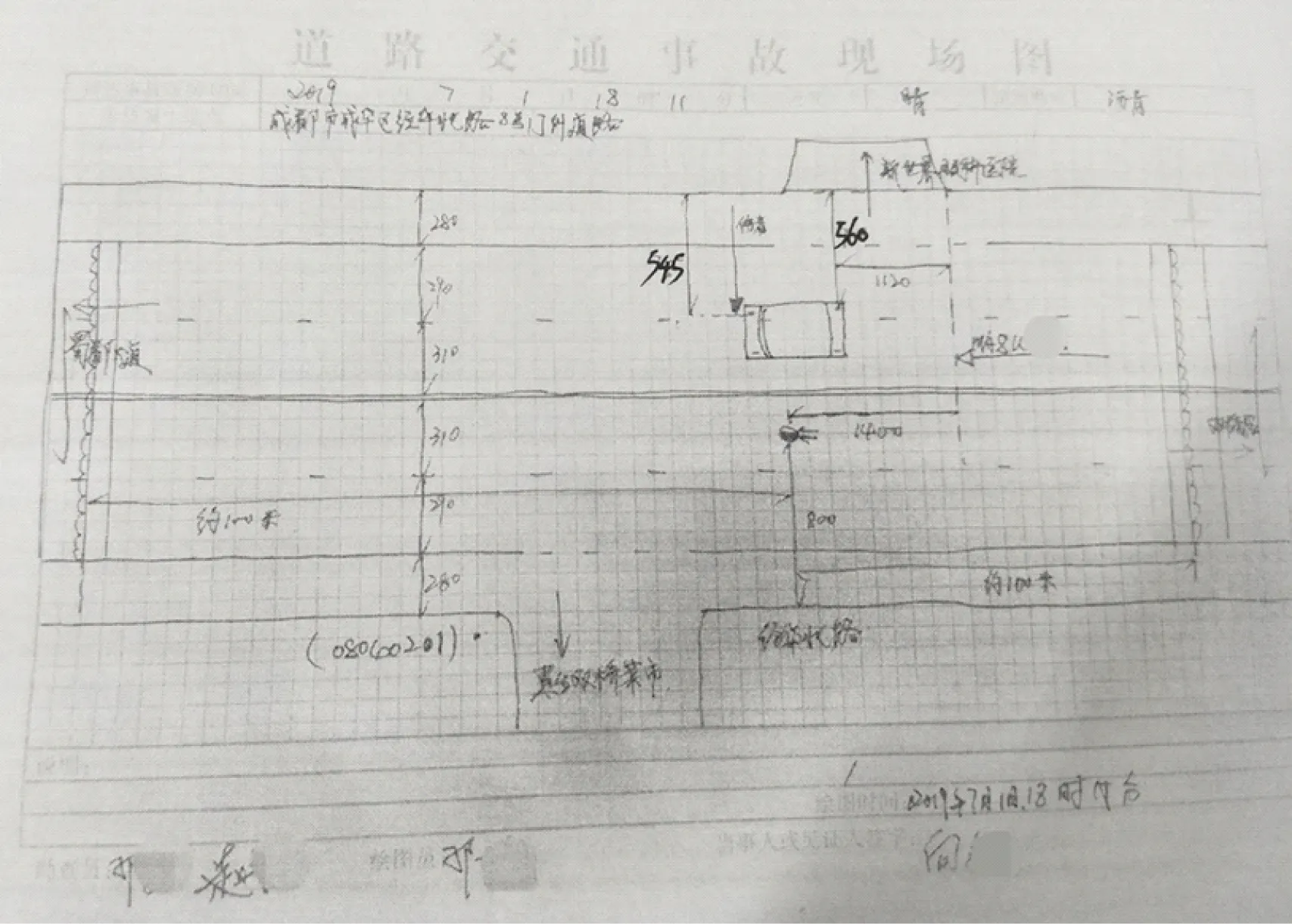
图2 交警手绘事故现场图
利用Pre-Scan软件对这次事故进行模拟仿真,并在相同场景中为该事故车辆添加了相应的需要测试的AEB算法,进行车辆AEB系统试验,并作对比分析。
2.2 案件材料分析
对本案件中的初始材料进行分析,包括交警手绘的事故现场图,交警拍摄的事故现场照片、事故车辆照片以及警方提供的监控录像和死亡人员伤情报告等信息。要以事故发生现场中的客观信息为基础,并结合证人口述笔录,才可对事故原因进行初步判断。
2.3 事故原因及过程分析
通过相关分析所得,并结合运动学及动力学相关理论,对事故发生的诱因及过程作了初步了解和判断。在本起交通事故中,从现场照片来看,事故车留下的制动印记较短,现场散落物较少,行人最终位置与车辆最终位置距离较近,因此初步判断该事故原因应该是行人违规横穿道路,车辆速度不快但驾驶员注意力不集中两方面。
通过采用Pre-Scan软件对本交通事故进行仿真再现,不仅可以更直观地了解事故发生的全过程,而且可方便地做相应的AEB算法试验,以验证在添加该AEB算法后能否有效的辅助驾驶员行车,确保在紧急危险情况下做到提前预警,及时刹车,避免此类交通事故发生,并为以后的自动驾驶车辆的制动系部分做好相应的AEB试验基础。
2.4 仿真测试场景搭建
(1) 场景参数设置。搭建的仿真测试场景应尽可能的再现事故发生前、发生时及发生后的各参与方的运动状态与具体形态。根据警方提供的事故车辆VIN铭牌,查询事故车辆相关信息,在Pre-Scan中选择相应的事故轿车车型,并对车辆相关的物理特性、初始状态、动力学参数及环境因素进行更改设置。若在软件中没有事故车辆模型,则选择相似车型作为替代[15]。测试场景设置如图3所示, 事故车辆模型设置如图4所示。

图3 测试场景设置

图4 车辆参数设置
(2) 场景搭建。依据警方提供的事故现场图,结合绘制的事故参与方最终位置,并根据实际情况设置的车辆—人体—路面的具体参数,在Pre-Scan软件中建立人—车—环境模型。为便于相关AEB试验分析,搭建2个相同的测试场景,1个用于案例事故仿真再现,1个用于案例事故车辆添加AEB算法并开展AEB试验,在线实时调整AEB算法参数,确保AEB算法的正确性。最后将输出结果对比分析,以验证基于Pre-Scan的自动驾驶车辆AEB试验的可行性。搭建的虚拟测试场景如图5所示。其中红色光束为搭载了AEB算法的测试车辆所带的长距雷达波和短距雷达波示意图。

图5 虚拟测试场景图(三维立体模型)
2.5 AEB算法试验及参数确定
在本次试验中,选取的AEB算法模型如图6所示。Pre-Scan可以通过与Matlab软件进行联合仿真,从而将搭建的虚拟测试场景转化为Simulink模型。因此,可以非常方便地向Simulink生成的测试车辆模型添加需要开展试验的AEB算法,并利用Matlab与Pre-Scan联合开展3D动画仿真,直观地观察行人与车辆的相对运动以及AEB算法能效。
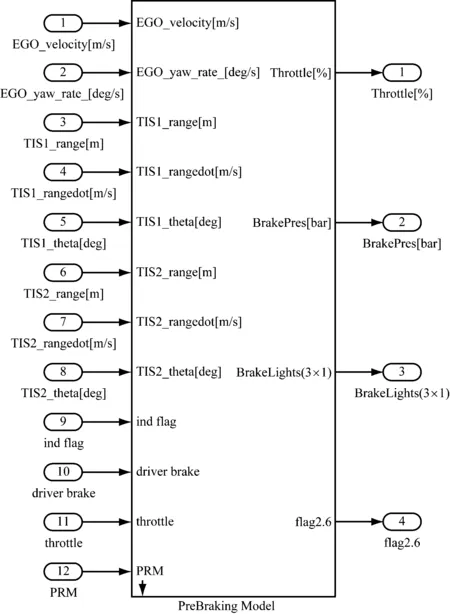
图6 AEB算法模型
AEB算法模型包含了12个输入信号和4个输出信号。当需要输入的12个控制信号都连接好后,只需要将输出的车辆节气门开度控制信号和车辆刹车控制信号分别与在Simulink自动生成的车辆动力学控制模型的节气门端口和刹车控制端口对应相接即可完成该AEB模型的添加。
在AEB算法中,最为重要的是计算与障碍物将要碰撞的时间(Time to collision,TTC)。通过预设TTC参数值,确定AEB算法的控制方式。不同的TTC参数,将会对AEB算法效果产生显著的影响。若预设的TTC值过大,那么AEB系统响应将会过于灵敏,严重影响驾驶体验,降低驾驶舒适性;若预设的TTC值过小,AEB系统响应较为迟钝,无法充分发挥AEB系统的效能,难以在紧急情况下及时避险,使驾驶安全性得不到保证[16-17]。在Pre-Scan中,可以通过不断微调参数TTC的值并即时仿真,而不必耗费大量的人力、物力、财力去做AEB试验,得到TTC值的最优解。经不断尝试以及结合实际情况分析,得到了3级TTC的值(见图7),可确保在案例场景下,若该事故车辆搭载该AEB算法,则可以提前自动制动,避免此交通事故的发生。此3级TTC的值分别为:2.6 s-向前碰撞预警预设阈值;1.6 s-40%制动阈值;0.6 s-100%制动阈值。根据统计,提前2.5 s给予驾驶员一个警告信号,人的反应时间在安全刹车距离下基本上可以做到将车辆刹停。而采用2级制动,可使AEB系统激活后更舒适、平顺地介入,且制动效果更强,减速度更大。

图7 3级TTC参数值
2.6 仿真结果分析
在确定了案例事故车辆所添加AEB算法的相关参数值后,得到以下仿真结果。若未搭载AEB算法,即在案例条件下,行人与车辆在仿真时间4.18 s时发生碰撞,此时碰撞速度为30 km/h。图8(a)、(b)为仿真时间同为4.18 s时是否搭载AEB算法的仿真结果对比图。

(a) 未搭载AEB算法
而在另一搭载了AEB算法的车辆上,在仿真时间3 s时便开启了向前碰撞预警并同时松开油门踏板,进入一级制动;在仿真时间3.8 s时进入2级全力制动;在仿真时间4.65 s时车辆刹停。此时车辆状态为车速为零、油门为零、制动力100%、发动机怠速,而行人已通过车辆前方,避免了本次交通事故发生。仿真过程中车辆的具体速度状态如图9、10所示。

图9 事故车辆速度-时间曲线图

图10 测试车辆速度-时间曲线图
由图9可见,对于未搭载AEB算法的车辆(事故车辆),在整个事故发生过程中,由于驾驶员并未注意到前方行人,故车辆没有被有效制动,从而导致了本起交通事故的发生。而由图10可见,对于搭载了AEB算法的车辆(测试车辆),在模拟本起交通事故过程中,在AEB系统的作用下,尽管驾驶员未注意到前方行人,但从其速度-时间图依旧可以反映出车辆具有两段有效的制动,并最终使车辆停下。观察图10可得,在仿真时间3 s左右,车辆AEB系统采取一级制动模式,并在仿真时间3.8 s左右采取二级全力制动模式,最终确保车辆在撞到行人之前停下。同时在4.65 s时,事故车辆的速度为11.18 m/s,而测试车辆速度为0 m/s,可见本次基于Pre-Scan的车辆AEB试验设计效果良好,为今后通过Pre-Scan快速、有效的做相应车辆的AEB算法开发和测试,同时开展相关AEB试验提供了新的解决思路与方法。图11所示为不同仿真时间段雷达扫描图。

(a) 正常行驶
同时观察雷达扫描图(蓝色光波为长距雷达波的扫描范围,红色光波为短距雷达波的扫描范围)可见,在保持安全距离的正常行驶状态下,当行人横穿马路时,能够被很好的探测到。当驾驶员未反应过来,预测碰撞时间小于1.6 s时,车辆自动进入40%制动状态。当预测碰撞时间小于0.6 s时,车辆自动进入全力制动状态,最终在行人位置之前停下,避免了本次交通事故发生。
3 结 语
通过以上案例中具体交通事故的试验过程表明,利用Pre-Scan开展自动驾驶车辆AEB试验设计,实现了交通事故仿真再现,以动画的形式展现行人、车辆的运动轨迹,并以图表和文字形式输出结果,得到详细的交通事故发生的过程,仿真结果具有科学性和直观性。对比搭载AEB系统的仿真结果可以看出,利用Pre-Scan软件可以非常方便的开展自动驾驶车辆的AEB试验,及时调整AEB算法参数,并在Matlab中读取车辆实时的运动状态,对原有AEB算法作进一步的分析和改进,以确保AEB算法可行性。
开展AEB算法的试验设计是自动驾驶车辆开发的前向工作中的重要内容,利用Pre-Scan软件进行自动驾驶车辆AEB试验设计,可以缩短开发周期,减少开发成本,并降低此类试验的危险性,有利于自动驾驶车辆的AEB系统开发,并做到更好的AEB试验效果。
猜你喜欢
汉语世界(The World of Chinese)(2021年4期)2021-09-05
意林(2021年5期)2021-04-18
小雪花·成长指南(2020年2期)2020-10-12
青少年科技博览(中学版)(2019年1期)2019-04-25
扬子江(2019年1期)2019-03-08
好日子(2018年9期)2018-10-12
中国公路(2017年18期)2018-01-23
小天使·一年级语数英综合(2017年6期)2017-06-07
汽车与安全(2016年5期)2016-12-01
当代经济(2015年20期)2015-04-16