
GNSS失锁时车载激光扫描点云精度提高方法研究
2022-08-04 12:53赵祥
铁道勘察 2022年4期
赵 祥
(浙江省测绘科学技术研究院,杭州 310030)
随着空间信息技术的不断发展,城市智能化程度也在不断提高。智慧城市建设的意义在于,可以提升城市竞争力,推动城市可持续发展。对于城市三维信息数据的获取,传统方式(如全站仪、水准仪等)不仅耗时耗力,而且难以反映城市细节的三维信息特征。车载激光扫描系统可高效、快捷、准确获取空间三维信息,已经成为信息化城市建设中重要的数据采集方式。车载激光扫描系统由多个子系统组成,其中,车载轨迹姿态主要通过POS数据、惯性导航IMU、GNSS接收机进行控制。对于车载激光扫描系统来说,在无信号遮挡、GNSS接收卫星数据良好的情况下,能够达到厘米级的精度。但是在实际工程应用中,难免因信号遮挡造成GNSS失锁等问题[1]。
为提高车载扫描系统GNSS失锁后的点云精度,已有学者开展相关研究,段龙飞等通过实验,发现增加控制点可以提高失锁时点云精度[2];王永红等以折线形式布设控制网,认为每400m布设1个控制点可有效提高车载扫描系统GNSS失锁时的点云精度[3]。为进一步深入研究GNSS失锁下控制点采集密度、布设形式对点云精度的影响,将车载激光扫描系统置于真实GNSS信号失锁环境中进行实验与分析,以期为实际工程中车载扫描系统GNSS信号失锁时点云精度的改善提供参考方法。
1 车载激光扫描系统
车载激光扫描技术是一种将激光雷达(Lidar)、GNSS接收机、惯性测量系统(INS)、全景相机以及控制系统等搭载在机动车或非机动车等运动平台上,通过对道路及其两侧的扫描来记录目标的位置和反射强度等信息,以获取地理实体的三维数据的空间信息技术[4],车载激光扫描原理见图1。
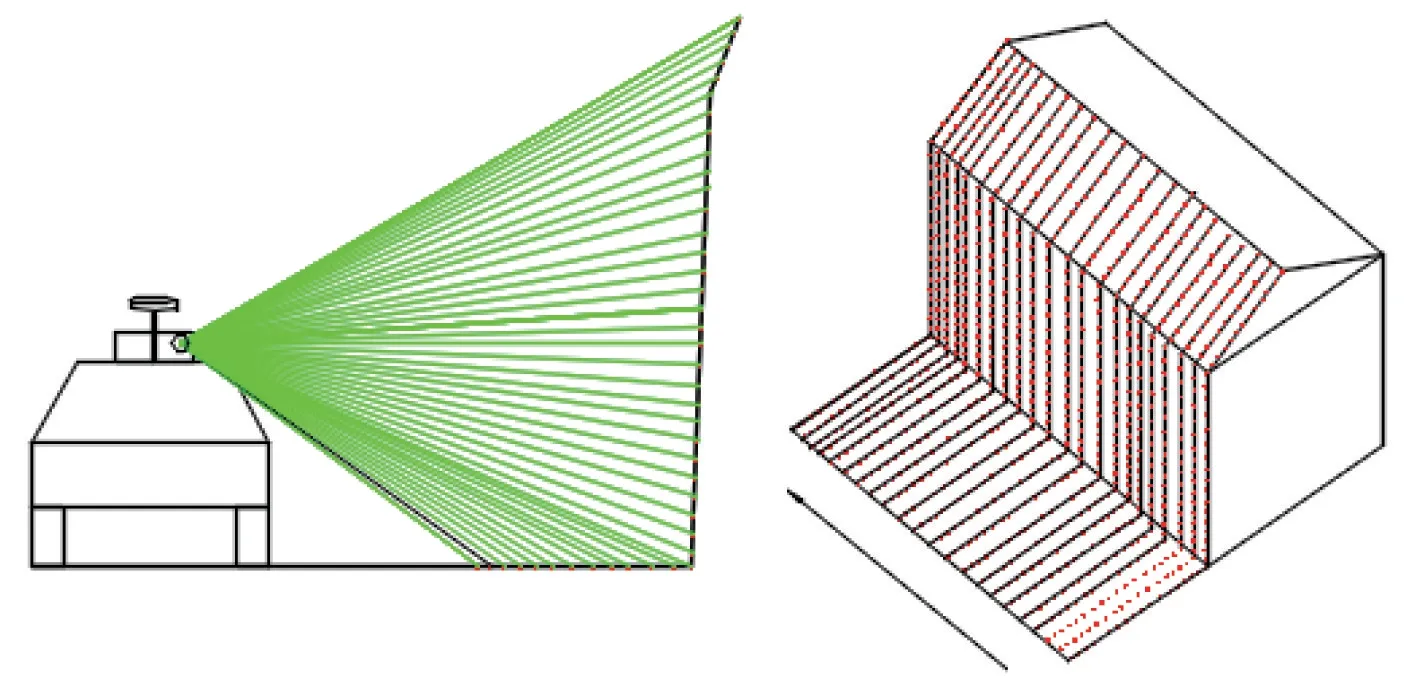
图1 车载激光扫描
一般情况下,车载移动扫描系统包括4个部分:移动平台、定位定姿、数据采集与数据处理。其中,数据采集部分由多镜头相机与激光扫描头组成,主要作用为获取环境地物的纹理信息与几何信息等;定位定姿部分主要由惯性测量系统IMU和里程计、GNSS接收机组成,用于获取移动平台瞬时的空间位置;数据处理部分主要包含车载轨迹结算、点云数据解算的软硬件等[5]。
2 实验实施与分析
2.1 仪器介绍
AS900车载激光扫描系统主要包括控制系统、供电系统、全景照片采集系统、惯性导航系统、GNSS接收机系统、激光扫描系统与车载平台。车载激光扫描系统见图2。

图2 车载激光扫描系统
该车载激光扫描系统可以采集获取环境中地理要素的大地坐标(B、L、H)与反射强度,并且全景照片系统可提供地理要素丰富的纹理与色彩信息,与点云配准后,可生成高质量彩色点云数据。
2.2 实验设计
当车载激光扫描系统失锁的时间达到50s时,采集得到的点云数据无法满足项目生产所需精度要求[6]。为准确反映失锁状态下不同网形控制点校正后点云精度的差异,将车载激光扫描的失锁时间设置为大于50s。在失锁路段布设不同控制点网形,分别按照直线、双直线、折线,每100,300,500m布设1个控制点,使用“GPS-RTK”技术采集车载点云数据中较为明显的特征点三维坐标信息,控制点布设网形见图3。
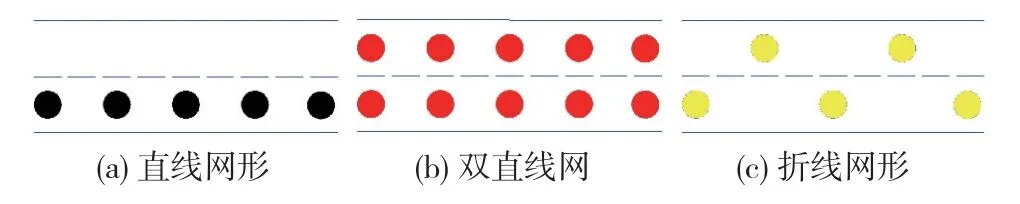
图3 控制点布设网形
2.3 车载数据采集
车载激光扫描前准备工作通常包括:设计技术参数、测设基站、规划行车路线、系统测试[7]。(1)选择实验区附近较为开阔的停车场,待设备安置完成后,开启系统设备,测试全景相机拍照效果并在软件中设置照片在平板电脑上的保存路径;初始化时,检查平板中GNSS、惯导、和激光信号,GNSS 卫星数量不宜小于10 颗[8],然后进行静止初始化,时长超过5min;(2)静止初始化完成后,行驶出停车场,进入实验区前需要进行动态初始化,至少应包括一段直线和两次拐弯;(3)完成动态初始化后,在进入实验区域前开启激光雷达进行扫描,同时全景相机将自动触发开启,采集过程中不宜与大车并行,行驶速度应满足点云密度要求,以不超过30km/h的车行速度进行数据采集[9];(4)进入试验区后,使用控制平板并关闭GNSS接收机,驶出试验区后开启GNSS接收机。使车载系统在实验区采集数据时完全靠惯导系统进行点云位置获取[10]。
2.4 车载数据处理
(1)车载轨迹解算
通过Inertial Explorer进行点云数据解算,首先将基站观测处理得到的RINEX数据和移动站数据转换成GPB数据[11];新建工程并保存到车次数据结构目录POST文件夹下,在工程向导中加载移动站(ROVER)GPB数据、IMU数据以及DMI数据;加载基站(BASE)GPB数据。利用软件进行基站与移动站数据紧耦合解算出车次POST文件[12]。
(2)点云数据解算
在点云解算软件中,选择需要解算的工程文件夹,选择项目信息栏,导入POST轨迹数据文件,定义解算点云的中央子午线,距离滤波值按照城市道路宽度选取(设置至少覆盖人行道两侧,一般道路可设置为50m)。保存所有设置,点击解算单个工程即可开始解算。通过车载轨迹解算、点云解算后得到的车载点云数据见图4。
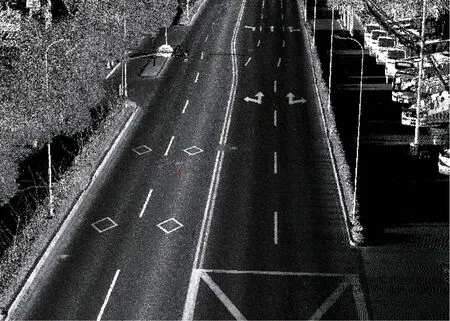
图4 实验区点云数据
2.5 特征点数据采集
为验证不同校正控制点布设对点云精度提高的影响,需将整体点云数据进行绝对位置校正。较为清晰的控制点可通过GPS-RTK进行同名点三维坐标采集,同时采集校正控制点与检验控制点。检验控制点应插空布设在校正控制点之间,校正点和检验点的命名要区分开,以免后续使用时混淆。校正控制点和检验控制点宜选取具有一定宽度和长度的道路标线(如停车线、标识、分隔线外角等),外业控制点采集见图5。
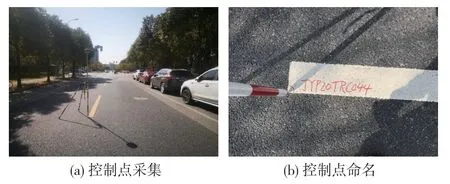
图5 利用CPS-RTK进行外业控制点采集
将外业测量所获得的校正控制点和检验控制点的三维坐标转换为对应的WGS84坐标系下经纬度坐标和大地高值,再将对应的经纬度坐标按照高斯投影归算到123°带的高斯平面直角坐标系中,即可得到可用于刺点校正或精度检查的坐标形式。
2.6 点云数据校正
根据获得的高斯平面直角坐标值和大地高值进行坐标文件格式处理,形成控制点文件,将文件放置于校正软件设置文件夹中。在校正软件中打开需校正的项目,再将原始点云选择转换成加载速度更快的外存点云。在校正软件中直接从点云列表中进行逐个勾选点云,开始刺点,通过校正同名特征点完成点云的整体校正。
2.7 精度统计与分析
按照同精度检测的方法,通过在点云上同名点刺点进行校正后点云精度检验[13-15],同名点点云轴向误差计算公式为
式中,(X,Y,Z)为利用RTK测量得到的检查点三维坐标;(x′,y′,z′)为点云中的检验点同名点。
中误差公式为
式中,Δ为真值与测量值的差值;n为检验点个数。
平面中误差σS可表示为

式中,σx为x轴中误差;σy为y轴中误差。
表1为每100m布设1个校正控制点后,校正后的点云检验误差;表2为每300m布设1个校正控制点后,校正后的点云检验误差;表3为每500m布设1个校正控制点后,校正后的点云检验误差。
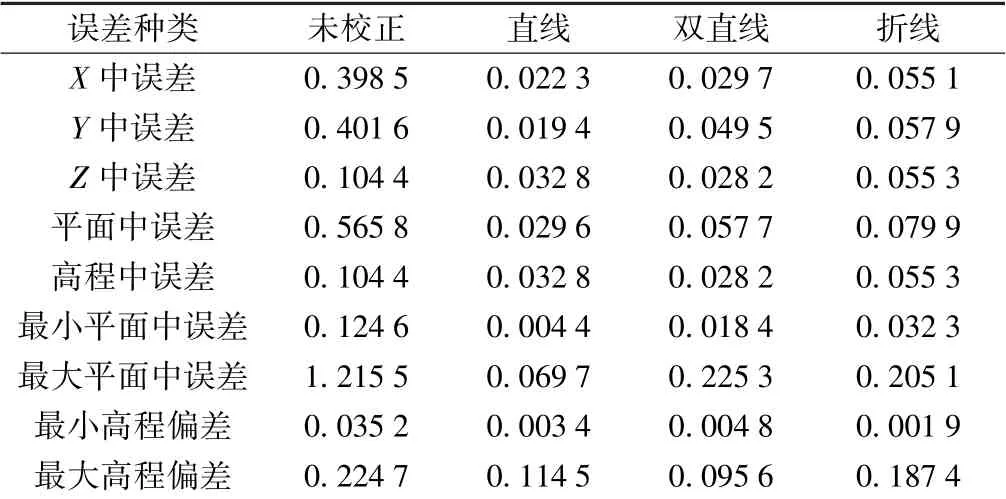
表1 100m不同网形控制点校正后点云精度 m
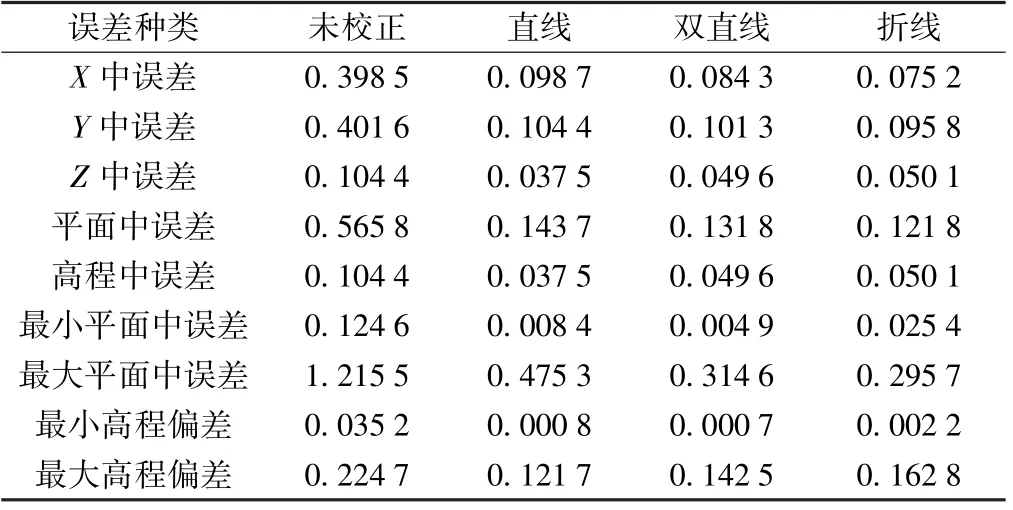
表2 300m不同网形控制点校正后点云精度 m
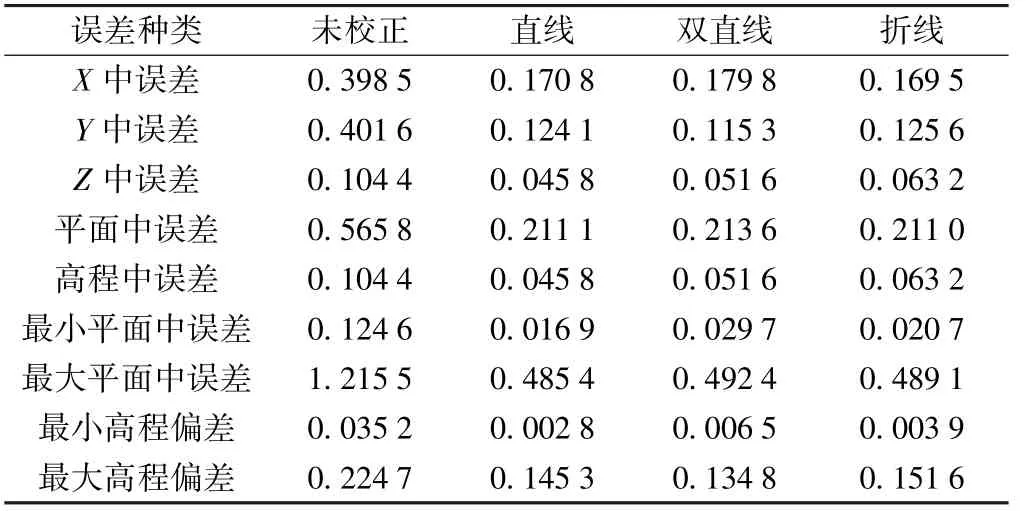
表3 500m不同网形控制点校正后点云精度 m
由表1可知,车载激光扫描系统在失锁状态下的点云平面精度与高程精度均较低,并且高程精度明显大于平面精度。每100m布设1个控制点时,通过不同网形控制点进行点云校正后,点云的精度都有大幅度提高,其中高程中误差从0.1044m变化至0.0282m,平面中误差从0.5658m变化至0.096m。通过3种网形校正后,折线网形的点云平面精度最低,直线网形点云平面精度最高,折线网形高程精度最低,双直线网形高程精度最高,其中双直线网形与直线网形的高程精度基本一致,相差仅0.0046m。
由表2可知,在每300m布设1个控制点时,经过3种控制点网形校正后的点云数据精度都有所提高,平面精度较高程精度提升更大,从0.5658m变化至0.1218m。点云校正后,直线网形的平面精度最低,折线网形的平面精度最高,同时折线网形的高程精度最低,直线网形的高程精度最高。
由表3可知,每500m布设1个控制点时, 3种校正后的点云数据精度都有一定程度提高,但是提高的幅度较小。平面精度从0.5658m最高提升至0.2110m,此时3种网形的平面精度较为一致,折线网形的高程精度最低,直线网形的高程精度最高。
3种网形点云校正后的点云数据精度见图6。通过表1~表3与图6可知,经过控制点校正后的点云数据精度都有所提高,特别是平面精度提高幅度最大。在控制点布设间距一致时,双直线网形与直线网形的控制点校正点云数据效果都较好,得到的点云数据精度较高。同一种控制点布设网形下,校正后的点云精度随着控制点密度的增加而提高。3种网形布设控制点进行点云校正后,点云精度会随着控制点密度的减小而逐步趋于一致。
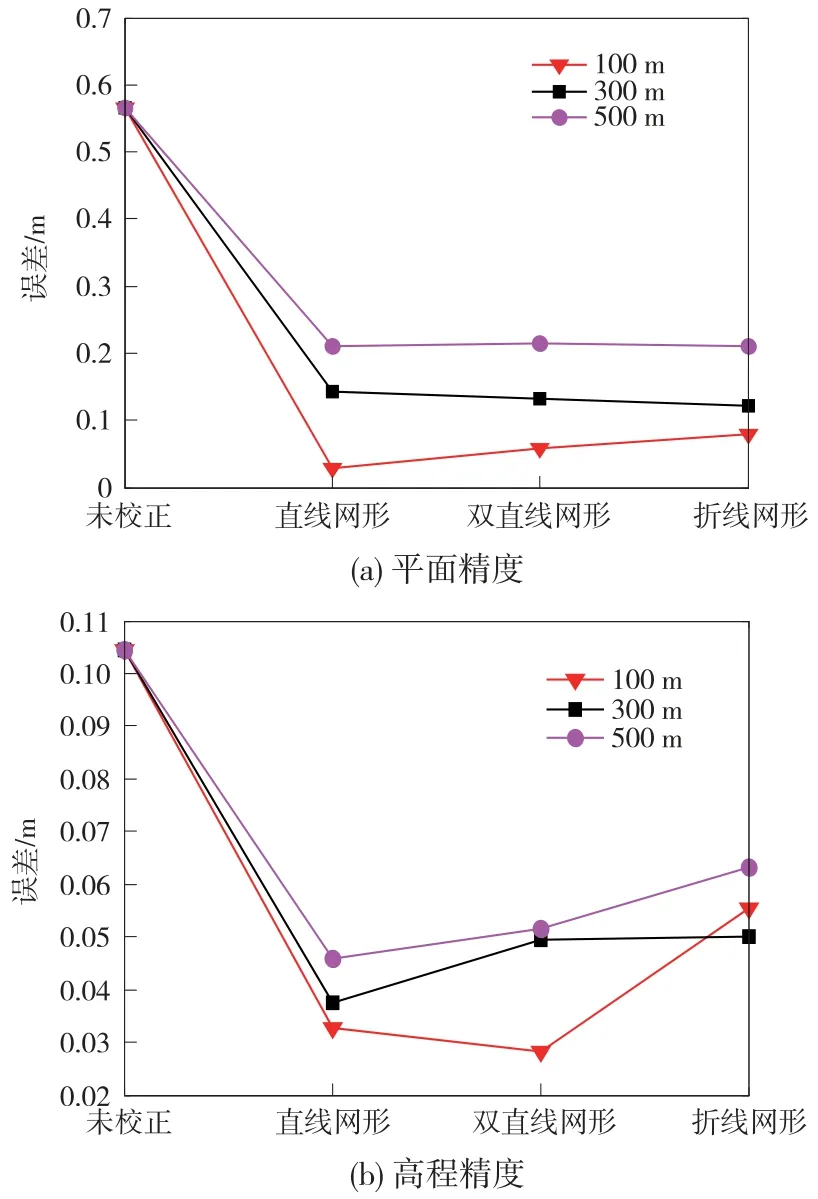
图6 校正后的点云精度
点云校正是通过将轨迹进行切割,通过每段内控制点计算该段内的轨迹校正参数。当只有车行轨迹一侧有控制点时,此时只会对X、Y、Z三轴的误差进行校正(如直线网形);当车行轨迹两侧都有控制点时,此时不仅可以对三轴误差进行校正,还可校正车载过程中的姿态误差(如折线网形和双直线网形)。双直线网形与直线网形校正后结果基本相同,表明在短时间失锁时,车载系统仍能够获取准确的姿态数据。因此,针对车载系统的短时间失锁,使用直线网形布设控制点的方式进行点云数据校正可达到要求。
3 结论
在车载激光扫描GNSS系统失锁下,分析不同控制网形布设控制点对校正后点云精度的影响。车载扫描系统经过实验区时,关闭GNSS接收装置,使车载系统仅靠惯性导航系统并进行车载轨迹获取。实验表明,车载系统在GNSS失锁状态下的点云精度较低,通过布设控制点进行点云数据校正,可以明显提高点云数据精度,并且点云精度随着控制点布设密度的增加而提高。比较3种控制点布设网形的点云精度,可知直线网形较其他2种网形,能更直接地提高点云精度,且布设方法简单。在实际生产过程中,如果车辆经过信号遮挡区域导致GNSS失锁时,建议以直线方式每100m布设1个控制点,以提高车载点云数据精度。
猜你喜欢
汽车实用技术(2022年10期)2022-06-09
全球定位系统(2021年1期)2021-03-26
国学(2020年1期)2020-06-29
铁道通信信号(2020年8期)2020-02-06
汽车维修与保养(2019年3期)2019-06-19
家庭影院技术(2018年11期)2019-01-21
北京航空航天大学学报(2017年4期)2017-11-23
摄影之友(影像视觉)(2017年10期)2017-11-07
摄影之友(影像视觉)(2017年1期)2017-07-18
安全(2015年6期)2016-01-19
