无人机应用发展关键基础设施与低空公共航路网规划
2022-08-03 05:56廖小罕徐晨晨叶虎平房世峰黄耀欢
中国科学院院刊 2022年7期
廖小罕 徐晨晨* 叶虎平 谭 翔 房世峰 黄耀欢 林 静
1 中国科学院地理科学与资源研究所 资源与环境信息系统国家重点实验室 北京 100101
2 中国科学院无人机应用与管控研究中心 北京 100101
3 中国民航局民航低空地理信息与航路重点实验室 北京 100101
随着现代高新技术的快速发展,全球民用无人机数量不断增长,低空无人机应用场景日益多样化,无人机及其应用正在逐渐影响甚至改变人类生活。中国已经是无人机生产和运行大国,截至 2021 年 12 月 31 日,经实名登记注册的民用无人机数量达 83.02 万架,日均飞行时间达 4.57 万小时①中国民航网. 新业态 无人机行业飞速发展. (2022-01-06)[2022-06-17]. http://www.caacnews.com.cn/1/6/202201/t20220106_1337505.html.;民用无人机每年飞行时间已超过 1 800 万小时,约为民航运输飞行量的 2 倍。进一步统计说明,轻小型无人机是低空飞行活动主体,其中 90% 以上无人机飞行高度低于 120 米(含),70% 以上无人机飞行速度低于 5 米/秒[1];低空无人机飞行活动具有典型的“低,慢,小”特征。但是,低空环境复杂多变,起伏的地形地貌、高动态变化的建筑物,以及复杂的电磁环境和低空局部湍流都给规模化无人机应用带来巨大风险。近年来,无人机“黑飞”“乱飞”事件频发,给国家、航空和公共安全带来极大威胁。高效有序规范发展和管控无人机、保障低空运行安全十分迫切。
为了有序管理无人机应用,无人机监管部门、生产企业、行业协会和科研院所等颁布或研发了相关监管政策或技术手段来隔离无人机与传统航空(军/民航)及其他空域用户活动,从而保障空域安全。主要包括:空域限制(无人机最大飞行高度[2]、地理围栏[3]和隔离空域[2]等)、冲突消减(最小安全间隔[4]、探测和避让[5]等)和无人机交通管理系统等。无人机交通管理系统是一种综合有效监管手段,该系统通过对经实名登记注册[6]且具备唯一识别码[7]的联网无人机进行实时监控和任务、时空资源的统一调度,从而实现了无人机积极管控和空域资源的合理配置。当前进展较快的包括美国国家航空航天局(NASA)研制的无人机交通管理(UTM)系统[8]、欧洲航空安全局(EASA)推出的 U-Space 系统[9]、中国民用航空局(CAAC)推动的民用无人驾驶航空器综合管理平台(UOM)②中国民用航空局. 民用无人驾驶航空器综合管理平台(UOM). [2022-06-01]. https://uom.caac.gov.cn.,以及新加坡项目团队提出的城市场景下无人机城市交通管理系统(UTM-UAS)等[10]。
通过上述监管政策的实施或技术手段的支持,低空无人机运行得到初步规范。随着政策的调整和完善及技术的发展,无人机监管体系也将日趋完善。然而,监管发展相对滞后于技术应用研发[11],信息化、自动化等高新技术的快速发展及其在无人机领域的深度应用带来的是更高标准的无人机飞行要求;尤其是在应对未来应用范围广、飞行频次高、业务类型多、面向群体广的低空规模化业务运行时,当前监管体系面临着更大的挑战。和几十年前传统无人机比较,当代无人机是“新技术之花”,其牢牢扎根于先进高技术和众多科技基础设施中。无人机安全运行高度依赖飞机外部科技基础设施提供支撑,包括全球导航卫星、低延迟高带宽通信、安全高效运行和有效监视监管等。无人机规模化商业运行时代,科学规划和构建能提供相应支撑的关键基础设施是无人机规模化安全高效运行的前提和基础。
论文基于当前无人机应用发展与监管现状,分析无人机低空规模化业务运行对于基础设施发展与建设的需求,并分析存在的主要问题;结合未来技术和政策发展趋势,提出低空无人机应用发展建议,并总结低空无人机应用的未来挑战。
1 低空无人机业务化运行对基础设施的需求分析
1.1 低空无人机业务化运行要求
当代无人机的迅猛发展主要得益于科技发展的浪潮,例如:微电子技术带动了无人机元器件和传感器的小型化、集成化发展,新材料技术助力无人机结构趋于轻质化、多功能化,自动化技术带来无人机的自动驾驶和作业,通信技术实现无人机的高效测控和实时高带宽图像传输功能,燃料电池、锂离子电池等技术延长无人机的续航时间,以及导航定位技术提供三维空间精准定位导航服务等。高新技术通过关键技术催生和若干“科技基础设施”的形式支撑了无人机应用的大发展,为低空规模化业务运行提供了必要条件。
面向低空的规模化业务应用,运营商安全生产和政府安全监管对无人机运行提出了高要求:① “永不迷失”,是指在导航卫星系统与各类增强导航系统支持下,无人机能实时获取自身高精度位置信息;② “永不失联”,是指在无线网、卫星和公网等通信技术及基础设施支持下,无人机时刻处于联网状态;③ “有效管控”,是要求无人机用户能按照军/民航或地方政府颁布的空域和飞行管制要求进行合规飞行,并及时接收管制部门指令;④ “安全运行”,主要是对无人机运行的确定性和安全性的要求,包括无人机运行环境安全、无人机之间及其与“有人机”之间的运行安全。
1.2 基础设施需求
外部公共或专用的基础设施是支撑以上无人机业务化运行要求的基础(图 1),主要包括以下 4 方面。
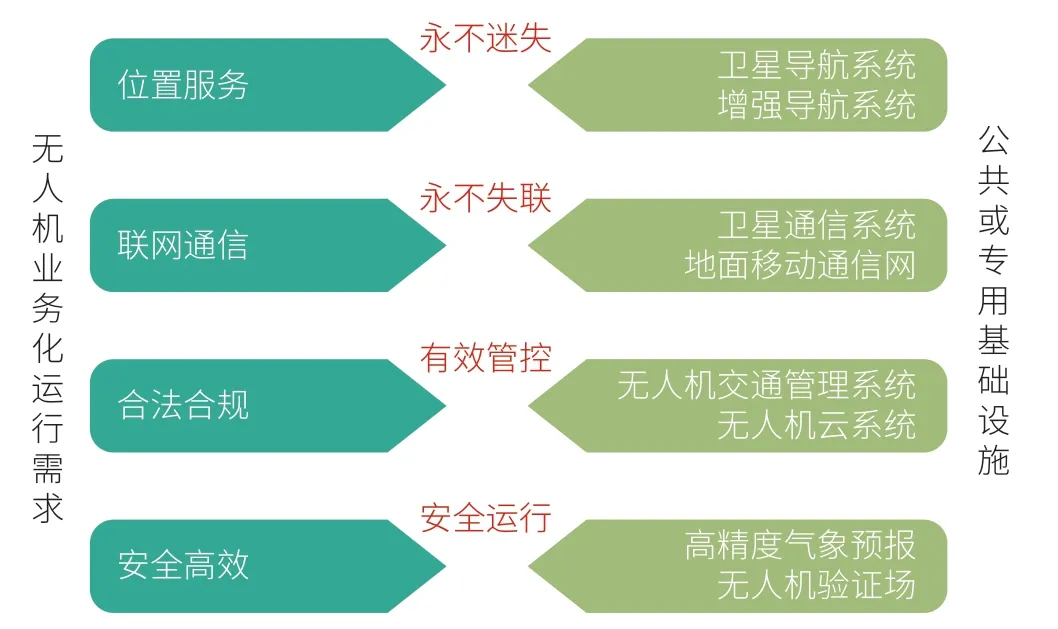
图1 低空无人机业务化运行对基础设施的需求Figure 1 Needs of infrastructures to support UAV commercial operations in low-altitude airspaces
(1)卫星导航系统和各类增强导航系统提供无人机位置服务。当代无人机飞行离不开导航系统,全球导航卫星系统(GNSS)和各类增强导航系统(包括 SBAS 和 GBAS③SBAS为星基增强系统,GBAS为地基增强系统。)为无人机高精度定位提供技术及基础设施支撑服务[12]。GNSS 能在地球表面或近地空间的任何地点为用户提供全天候三维坐标、速度和时间信息。目前,全球主要有四大导航卫星系统,包括美国的全球定位系统(GPS),俄罗斯的格洛纳斯卫星导航系统(GLONASS),欧洲的伽利略导航系统(GALILEO),以及我国的北斗卫星导航系统(BDS)。SBAS 通过提供差分修正和完好性监控数据加强 GNSS 监测的精度和完好性,是卫星导航的一种补充加强手段。卫星导航信号结合 GBAS,如通过参考站信息开展基于载波相位实时差分技术(RTK)的动态解算,能够达到厘米级定位精度。通过 GNSS、SBAS 及 GBAS 等系列公共基础设施,可实现无人机的动态位置实时解算、高速移动速度解算,提供全天时、全天候的时间基准和授时通信服务。这些服务具有高精度、高可靠、多模态、兼容组合的特点,客观上为无人机飞行与监管提供了非常重要的技术支撑。然而,复杂地理环境下(如城市、自然峡谷和森林)容易出现信号遮挡或阻塞,从而降低卫星导航系统的可用性和定位准确性。对 GPS 精度的研究试验发现,由于山体或建筑物导致卫星信号阻塞,无人机定位漂移可能超过 20 米[13]。这使得用户需要寻求其他独立于 GNSS 的外部基础设施解决方案[14]。
(2)卫星通信系统和地面移动通信网支撑无人机联网通信。无人机安全飞行和监管要求无人机必须时刻处于联网状态。当前无人机通信主要基于无线、卫星中继与地面移动通信技术。其中,无线通信通过数传电台或无线局域网技术(主要是指 2.4 吉赫兹)实现,均需要进一步开发完善。无线数传电台在特定频段上进行简单点对点通信,存在频谱资源可用性和通信延迟等挑战;无线局域网技术是一种短距离通信传输技术,存在信号易受遮挡和干扰等问题。无人机卫星中继通信通过专用机载模块利用北斗等低轨卫星通信系统实现远距离通信,成本较高,一般应用于无人区等特殊作业场景,以及应急情况下的无人机通信服务。相比传统通信手段,地面移动通信技术优势在于高速率、低成本和基础设施覆盖范围广。当前广泛支撑无人机作业的地面移动通信技术主要是 4G 通信技术,基于覆盖全国的 4G 通信基础设施,在大部分应用场景下,监管部门和用户能实时获取联网无人机信号。随着低空时代的到来,无人机业务化、商业化运行对实时通信提出了更高要求,高带宽、低时延、端对端是保障低空业务化稳定运行的基本条件。由于空中通信业务的特殊性,当前面向地面用户的主流通信技术难于满足数百米高度层和高带宽稳定应用要求,而具备高带宽、低时延、满足更深低空纵深覆盖的新一代通信技术(如 5G 通信技术)将是低空无人机应用主要低成本保障性通信手段。
(3)无人机交通管理系统和云系统服务无人机合法合规运行。当前各国都在建设无人机云端管理系统[15],中国也提出了 UOM 一期建设框架,同时行业部门更早的时候也研发了无人驾驶航空器空中交通管理信息服务系统(UTMISS)服务平台④中国民用航空局. 无人驾驶航空器空中交通管理信息服务系统(UTMISS). [2022-06-01]. https://www.utmiss.com/.。在中国民用航空局的主导和授权下,各行业和企业也开展了一些无人机试点工作,如UTMISS在深圳和海南的空域开展审批试点工作。总之,顶层架构UOM,核心UTMISS,行业无人机云,以及公安部、工业和信息化部等部门关于无人机系统的政策(地理围栏、无人机实名登记注册等),都为无人机安全运行提供了相应支撑。当前,任何一架无人机都必须在合法云系统监管条件下方能合法飞行。事实上,这也是一个服务无人机低空应用发展的重要基础设施。中国科学院地理科学与资源研究所主持研发的“中科天网”云服务系统也获得中国民用航空局批准运行⑤中国科学院地理科学与资源研究所. “中科天网”无人机综合管理云系统正式获得中国民用航空局批准运行. (2019-04-17)[2022-06-01]. http://www.igsnrr.cas.cn/xwzx/zhxw/201904/t20190417_5276493.html.。
(4)高精度气象预报和无人机验证场支撑安全运行与科学实验。在实际飞行中,切变风和大气边界层湍流等局地极端气候一直是造成低空无人机运行事故的重要原因。尤其是在城市复杂环境下,风场的快速动态变化会降低无人机飞行的稳定性,气压变化带来的感知高度误差也会降低无人机的定位精度,严重影响起降阶段运行安全。为了保障低空无人机运行安全,需要提前预报和及时获取沿途及起降场的天气情况。然而,大区域范围的高精度气象预报要求高算力、高存储空间和精细化高分辨率天气预报模式支持,当前区域气象预报模式模拟结果的时空精度还达不到要求,尤其是风力风速的预报还存在比较大的误差,无法满足高频次的低空商业运行需求。另外,在无人机应用进程中,需要在特定区域特定场景内进行多类别无人机科学实验,以验证冲突避让、低空监管、对地遥感等关键技术的可行性与合理性。无人机验证场是一种保障无人机科学试验飞行安全的重要基础设施,其对于无人机未来商业化运行不可或缺。近 20 年来,中国科学院地理科学与资源研究所和空天信息创新研究院等已陆续在全国结合中国科学院野外科学台站或通过与地方合作,建设了一批面向多应用场景的无人机综合验证场(图 2),初步形成无人机空港服务网,并在科学观测试验和应急观测实践中发挥了重要作用⑥江西省人民政府. 国家防总秘书长、应急管理部副部长兼水利部副部长周学文调研指导鄱阳湖模型试验研究基地工作. (2020-07-21)[2022-06-01]. http://www.jiangxi.gov.cn/art/2020/7/21/art_5194_2629068.html.。

图2 部分中国科学院无人机验证场展示[16]Figure 2 Demonstrations of part of UAV verification fields of Chinese Academy of Sciences[16]
1.3 基础设施问题分析
目前,公共或专用的基础设施支撑无人机运行还局限于小规模、低频次和简单环境。面向未来无人机商业化运行大发展,尤其是低空无人机规模化和体系化发展,当前基础设施服务体系还存在以下问题需要不断完善和改进: 对于高精度导航,GPS 和广播式自动相关监视系统(ADS-B)等当前常用无人机导航和监视技术在复杂城市环境中存在位置误差较大、高密度环境过饱和等问题; 在通信覆盖方面,无线通信易受环境干扰,卫星通信成本较高,地面移动通信基础设施无法有效覆盖空中通信需求; 对于低空无人机运行的监视监管,无人机监管平台及云交换系统只能监管主动接入系统的无人机,无法有效监管未注册和非合作无人机,也无法有效避免无人机与地表障碍物的碰撞; 对于安全运行,现行气象预报服务也仅适用于区域尺度要素数值预报,没有针对飞行路线的带状气象定制服务,无法保障低空气象预报及时满足业务化运行需求。
总之,由于缺乏满足发展需求的技术体系和相适应的科技基础设施支撑,规模化无人机在紧邻复杂地理环境的低空无法做到常态化安全高效运行,其中将低空公共航路作为安全高效运行的保障性新型基础设施这一观念逐渐获得地方政府和空域监管部门的认可[17,18]。当前无人机管理系统和云平台实际上是没有航路的,而构建航路在近些年已经为很多物流企业所实践⑦人民日报. 美团无人机助力全国首个城市低空物流运营示范中心建设. (2021-07-10)[2022-06-01]. https://wap.peopleapp.com/article/6246541/6144731.。以低空公共航路为核心,在当前基础设施水平和高技术发展基础上,融合高精度多组合导航定位、5G联网通信、精细气象预报等新一代技术,构建以航路为载体的低空无人机应用服务能力,升级完善固有基础设施或者新建基础设施形成新型基础设施体系,对于应对规模化低空业务运行十分重要。
2 低空公共航路网是低空无人机运行关键新型基础设施
关于为无人机运行预设航路,当前国内外存在一种有争议的学术观点,即无人机的发展是遵循自由飞行还是沿航路飞行。温故知新,民航运输发展经历了自由飞行到航路飞行的历史。早期,在飞机数量少的时候飞行员在航线选择上有很大的自由度。现在飞机越来越多,缺乏航路划设和管制造成了严重的机毁人亡事故,这促使各国在全球范围内建立了完善的空中交通管理(ATM)体系。空域管理问题可以比喻为泳池管理问题。当游泳池里面人满为患,并且需求与能力各异时,如何提升游泳池利用率?设计泳道是很好的解决方案。其实航路就是空中的“泳道”,也是解决低空无人机有序运行的“良方”。人自身具备很好的探测与避让(D&A)功能,但是人足够多时游泳池还是需要规划泳道。同理,尽管无人机可以通过 D&A 功能实现避让,对于规模化无人机安全高效运行,航路将是重要选项。
2.1 无人机低空公共航路发展现状
2017 年,中国科学院首先提出发展无人机低空公共航路倡议[19]。2019 年,中国民用航空局将低空航路纳入《无人驾驶航空器飞行管理暂行条例(征求意见稿)》[17],确定了国内发展无人机低空航路的趋势。UOM 系统虽然没有航路服务功能,但是中国科学院和中国民用航空局签订了战略协议,中国科学院重点项目支持研发的春蚕系统(ARPS)在科技层面实现了与中国民用航空局 UOM 的耦合(图 3)。春蚕系统也是国内首个具备航路规划与仿真飞行验证功能的系统,包括智能化算法库、高动态海量基础地理信息与遥感大数据平台、航路网规划构建与仿真验证模块和系统产出的“天路图”(图 4)。

图3 春蚕系统(ARPS)与民用无人驾驶航空器综合管理平台(UOM)耦合界面 Figure 3 Coupling interface between air route planning system (ARPS) and integrated management platform of civil unmanned aerial vehicle (UOM)
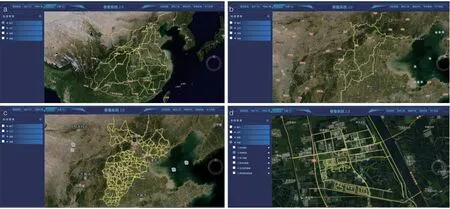
图4 春蚕系统(ARPS)输出的“天路图”展示Figure 4 Demonstration of “Sky Roadmap” in air route planning system (ARPS)
2021 年 12 月,中国科学院牵头制定的“面向无人机运行的低空空域结构化框架标准”(IEEE Std 1939.1TM-2021)正式出版,这是电气与电子工程师协会(IEEE)首个关于无人机低空运行的国际标准[20]。该标准定义了一种以低空公共航路为核心,旨在促进无人机交通管理安全和有效发展的无人机低空空域结构,包括网格技术、遥感数据、通信与联网、航路规划、运行和管理等内容(图 5)。其中,网格和编码技术是构建结构化低空的基础性技术,遥感及其地物识别提取是低空结构化建设所需地表地理信息的重要来源,通信和联网技术可为低空无人机运行提供高质量、安全可靠的通信和数据链路,低空航路是一种精细的低空空域结构,运行和管理技术从 UTM 建设角度提供航路运行建议。
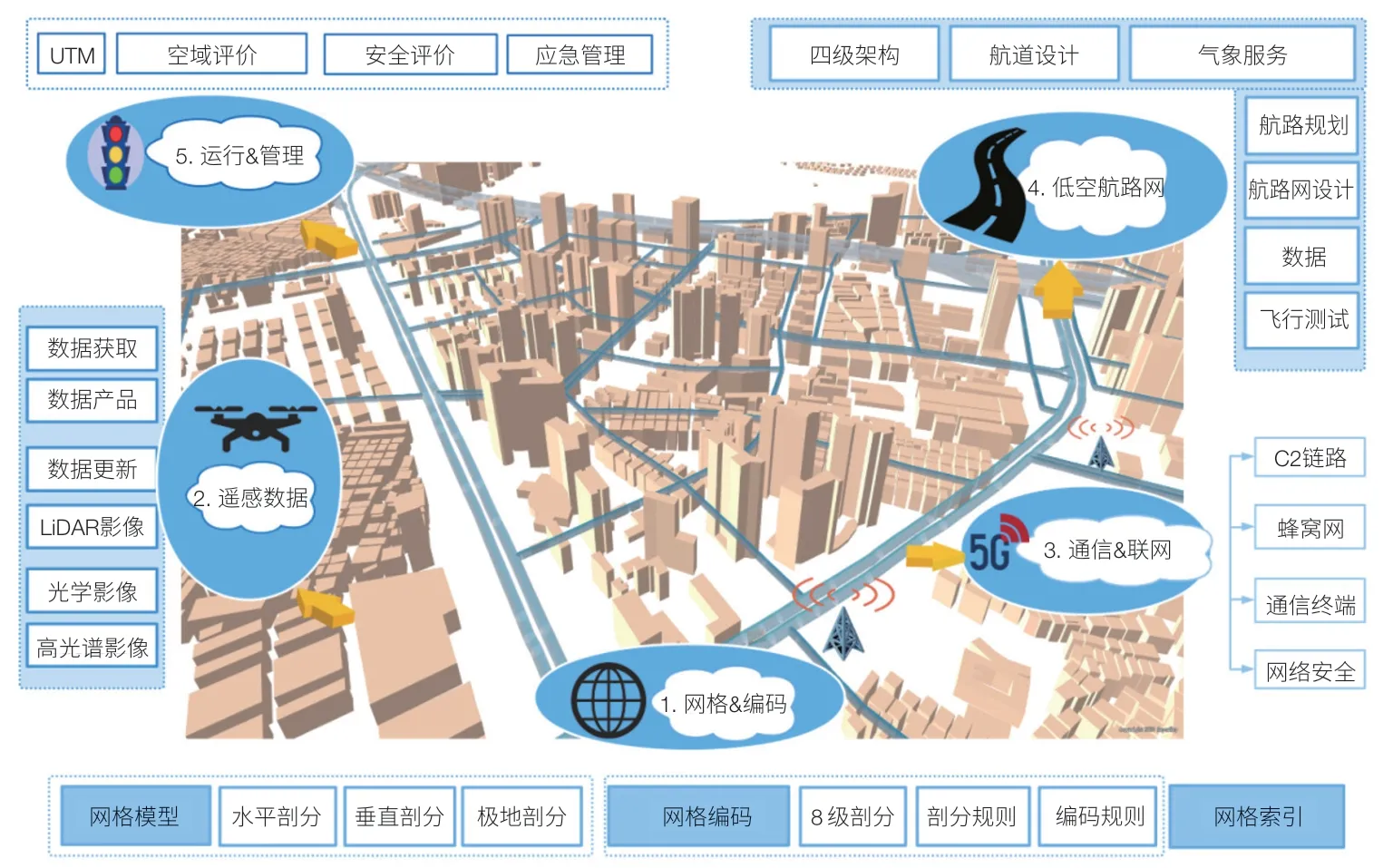
图5 “面向无人机运行的低空空域结构化框架标准”(IEEE Std 1939.1TM-2021)的内容框架Figure 5 Structure of standard of “A framework for structuring low altitude airspace for UAV operation” (IEEE Std 1939.1TM-2021)
2.2 无人机低空公共航路构建关键问题
低空地理环境复杂多变,不仅有着起伏的地形地貌和动态变化的合法/非法建筑物,以及电网、高塔、风车等人工构筑物,还有局地极端天气。同时,在低空运行的航空器会带来噪音,影响居民生活,并且机地通讯也易受电磁环境和地形干扰等,这些都是不利无人机飞行的因素。因此,在低空规划航路困难重重。要发展和建设无人机低空公共航路基础设施,以下 2 个关键问题亟须解决。
无人机低空公共航路敏感约束地理要素快速识别与精准提取。清晰明确的地理环境是低空无人机安全运行的前提条件。城市低空环境复杂多变,地物尺度精细。由于重返周期和空间分辨率等限制,卫星遥感手段很难满足高动态精细地理信息获取的要求。随着传感器技术的不断发展,机动灵活的无人机通过搭载多类型传感器逐渐成为动态获取高清遥感影像的有效手段。基于此,通过半自动/自动化的地物识别与提取算法,用户可以快速获取高精度航路敏感约束地理要素信息。为支撑大范围规模化商业飞行,建议构建航路空间范围内关键约束要素的动态更新周期与飞行安全间定量关系,并通过大数据平台等技术手段整合不同来源的高分辨率高动态更新无人机遥感数据,从而降低地理信息获取、更新和航路维护的成本。
约束地理要素三维净空范围的科学确定。地理围栏是一种通过划定净空范围来保障禁飞区安全和规范无人机运行的技术手段。空域监管部门通过划定永久或临时净空范围来限制无人机活动。从已公布的地理围栏数据来看,当前净空范围远超无人机避障所需空间。当代无人机已经可以灵活快速躲避障碍物,而例如离电力线和塔杆一公里等净空范围的规定,虽能降低无人机碰撞风险,但也极大地降低了低空空域资源的利用率。因此,为了应对业务化运行时代低空空域资源的稀缺性问题,建议进一步科学论证约束地理要素的三维净空范围,尤其是一些关键的地理约束要素(如建筑物等)和重要的飞行条件(如噪声、隐私等),明确无人机与上述要素的安全间隔。
3 基于低空公共航路的新型基础设施建设展望
在信息化、自动化和高性能计算等新一代技术迅速发展的背景下,开展以低空公共航路为核心的通信、导航、监视(CNS)和航路气象服务等专用能力建设是未来面向低空业务化运行的新基建发展趋势,建议形成如图 6 所示的新基建体系。

图6 基于低空公共航路的低空无人机应用发展基础设施体系Figure 6 Infrastructure system of UAV application development in low-altitude airspace based on low-altitude public air routes
3.1 构建基于低空公共航路的无人机 CNS 能力
(1)通信。当前地面移动通信基础设施布局无法有效覆盖 300 米高度以上的无人机通信需求,易出现信号中断等问题[21]。构建基于低空公共航路的高速率、高带宽、低延时的专用通信环境将是一种低空通信能力提升手段。公共通讯基础设施的开放,以及专用通信能力的建设将支持高速移动遥感无人机大容量数传和大范围通信的跨基站无缝切换。建议基于现有地面移动通信基站布局,通过大规模天线阵列和波束赋形等新技术切换更窄的波束朝向低空运行无人机,据此优化调整航路沿途的通信基站天线朝向,实现空中信号增强覆盖;结合 5G 等新一代通信技术基站的波束覆盖特点完善现有基站的布局设计,保障低空通信的空间连续性,缩短多地面站之间的通信切换时间。
(2)导航。针对复杂环境下导航定位漂移问题,建议通过使用基于图像的导航系统、协作导航或信号,以及额外的地面基础设施辅助,实现更高的定位精度[22]。例如,GPS 和蜂窝移动通信网络的组合可将误差降低至厘米级。针对 GNSS 短时间内误差限宽问题,结合具备短时间内高精度位置优势的惯导系统,可以提高精度、可靠性和数据的更新效率,更好地服务于无人机导航定位需求[12]。
(3)监视。在传统雷达不足以监视低空无人机运行的背景下,非合作无人机一直是导致“黑飞”“乱飞”的主要原因。针对非合作无人机的低空监视,自主、高效的低空监视网建设应是未来发展方向。无论是合作对象还是非合作对象,都应具备被监管能力。但是对于全国土范围内的低空全域监管,投资将非常巨大。因此,建议基于低空公共航路建设低空监视网。对于重点大范围区域,可以进行局部的全域监视网建设。同时,开发克服 ADS-B 限制的先进监视系统,更高的飞行自由度将需要更复杂的 CNS 技术支撑。基于航路的低空监视服务网建设将是低空产业链的“技术底座”和平稳运行的“能力保障”。
3.2 基于高精度预报系统提供低空公共航路气象服务
高精度气象预报的核心在于保障高空间分辨率和高预报频次,尤其考虑到城市低空环境的复杂性和运行无人机以轻小机型为主等特点,基于航路的气象预报需要达到米级和小时级,短距离航路甚至需要达到分钟级。如何在有限计算资源空间内兼顾空间分辨率和时间效率?基于航路的带状核心气象要素数值模拟是一种有效手段。例如,有学者基于高分辨率气候模式模拟了京津冀地区无人机低空公共航路沿途风速风向数值,并与气象台站实际观测数据进行对比分析[23]。然而,当前基于航路的精准带状天气预报研究进展无法满足无人机运行对气象预报的高时效性要求。建议采用自适应网格技术进行带状气象数值快速模拟,核心问题在于气象模式模拟时自适应网格大小及网格移动方式的设置。另外,如何获取高动态更新的城市湍流廓线也是值得探讨的问题,已有学者利用无人机搭载微小型气象站来监测获取城市湍流信息[24]。中国科学院相关团队也在航路气象预报方面做了一些探索,并在上海金山至浙江舟山群岛的无人机海上运输中进行了实际应用⑧上海市金山区人民政府. 全国首飞成功!无人机完成海岛间超长距离运输 舟山海鲜1小时送达上海. (2021-08-30)[2022-06-01]. https://jinshan.gov.cn/ysdt-zxdt/20210830/819793.html.,通过模拟温度、气压、风速、风向、湿度、降水概率等气象指标数值预报 50—300 米高度层的高精度气象信息,为长距离航路运行提供气象保障。
4 总结
当代无人机是高新技术交叉融合孵化出来的“新技术之花”,其在低空的安全、高效运行需要充分用好卫星导航特别是北斗导航卫星系统、卫星和地面移动通信等公共基础设施服务。在无人机规模化商业运行时代,需要进一步开发利用高精度导航、新一代移动通信网等重要基础设施服务能力,规划和建设好面向低空无人机大规模商业化应用的低空公共航路网、云监管、低空监视、航路气象预报等专用基础设施规划建设,特别是超前规划多层级与地面基础设施有机衔接的无人机低空公共航路网新型基础设施。为了加快推进低空公共航路网建设,需要中央或更多的地方政府层面出台相关政策支持,从法律法规、关键技术突破和数据获取等科学层面深化航路规划构建理论研究和应用实践推进,为未来城市空中交通新型基础设施建设和安全高效运行提供系统关键技术与基础性解决方案;并借助我国民用无人机产业领先优势,抓住低空经济发展新机遇,将低空无人机大规模商业化运行作为低空经济“动脉”,带动无人机制造业和服务业的发展。在国家和地方建设新型基础设施有关政策支持下,相信未来几年低空“天路”在深圳等先行示范区内将率先开展深化研究与实际应用探索。
猜你喜欢
中国化肥信息(2022年5期)2022-08-30
清华金融评论(2022年4期)2022-04-13
军民两用技术与产品(2021年10期)2021-03-16
中国计算机报(2020年32期)2020-09-06
火力与指挥控制(2020年2期)2020-04-02
北京航空航天大学学报(2017年9期)2017-12-18
商业会计(2017年11期)2017-07-21
北京航空航天大学学报(2016年7期)2016-11-16
南方文学(2016年3期)2016-06-12
兵器知识(2016年2期)2016-01-29