不同激活孔径和聚焦深度对相控阵超声横波检测灵敏度的影响
2022-08-03 08:30宋双官于长乐廖兵兵杨娟莉
无损检测 2022年4期
宋双官,于长乐,李 琪,廖兵兵,田 利,杨娟莉
(1.机械工业上海蓝亚石化设备检测所有限公司,上海 201518;2.陕西恩埃姆检测技术有限公司,西安 710075)
相控阵超声系统通过调整阵列中不同晶片的激发时间延迟,来控制声束的偏转和聚焦。其对偏转的控制是通过控制激发晶片组的位置或调节组内激发晶片的延迟时间进行的,通过控制偏转可实现线扫,扇扫等不同的扫查方式;对聚焦的控制主要是通过调整组内激发晶片的延迟时间来实现的。超声波的焦点并非一个点,而是在一个区域内都拥有较高的能量,这个区域被称为聚焦区。因为这个区域在声束扩散方向上较窄,而在超声波传播方向上较长,接近圆柱形,所以聚焦区也被称为焦柱。焦柱结构如图1所示,图中ZB为焦柱起点;FZ为聚焦区;ZE为焦柱终点;D为晶片直径。有研究表明,焦距越接近近场区长度,该区域声场能量越均匀,其聚焦效果越差。
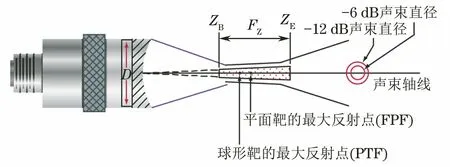
图1 焦柱结构示意
在实际工作中,先根据待检测之后工件的情况和可能产生的缺陷确定检测方法,再选择合适的探头并设置正确的焦点是制定检测工艺的重要环节。因此,选择的激活孔径和焦点位置是否能保证检测系统在所关注的区域内拥有足够的灵敏度,是重要的步骤。
现在的相控阵超声设备都具有TCG(时间校正增益)补偿功能,可将不同深度的灵敏度补偿一致,但是一方面补偿的总增益是有限的;另一方面在灵敏度较低的区域进行增益补偿,提高缺陷信号波幅的同时也会提高噪声信号波幅,并不能改善信噪比。因此为了优化检测工艺,提高缺陷检出率,还是应该对整个检测区域的灵敏度情况有所了解。因此笔者通过试验测定了不同激活孔径和聚焦深度下,不同深度横通孔在55°横波下的检测灵敏度,探究这些因素对相控阵超声横波检测灵敏度的影响。
1 研究背景
相控阵超声检测时聚焦深度及激活孔径对检测灵敏度影响的相关研究更多集中在纵波方面。不同偏转角度下的声场分布如图2所示,相控阵超声纵波检测不同偏转角度下声压与声程的关系如图3所示[1]。

图2 不同偏转角度下的声场分布
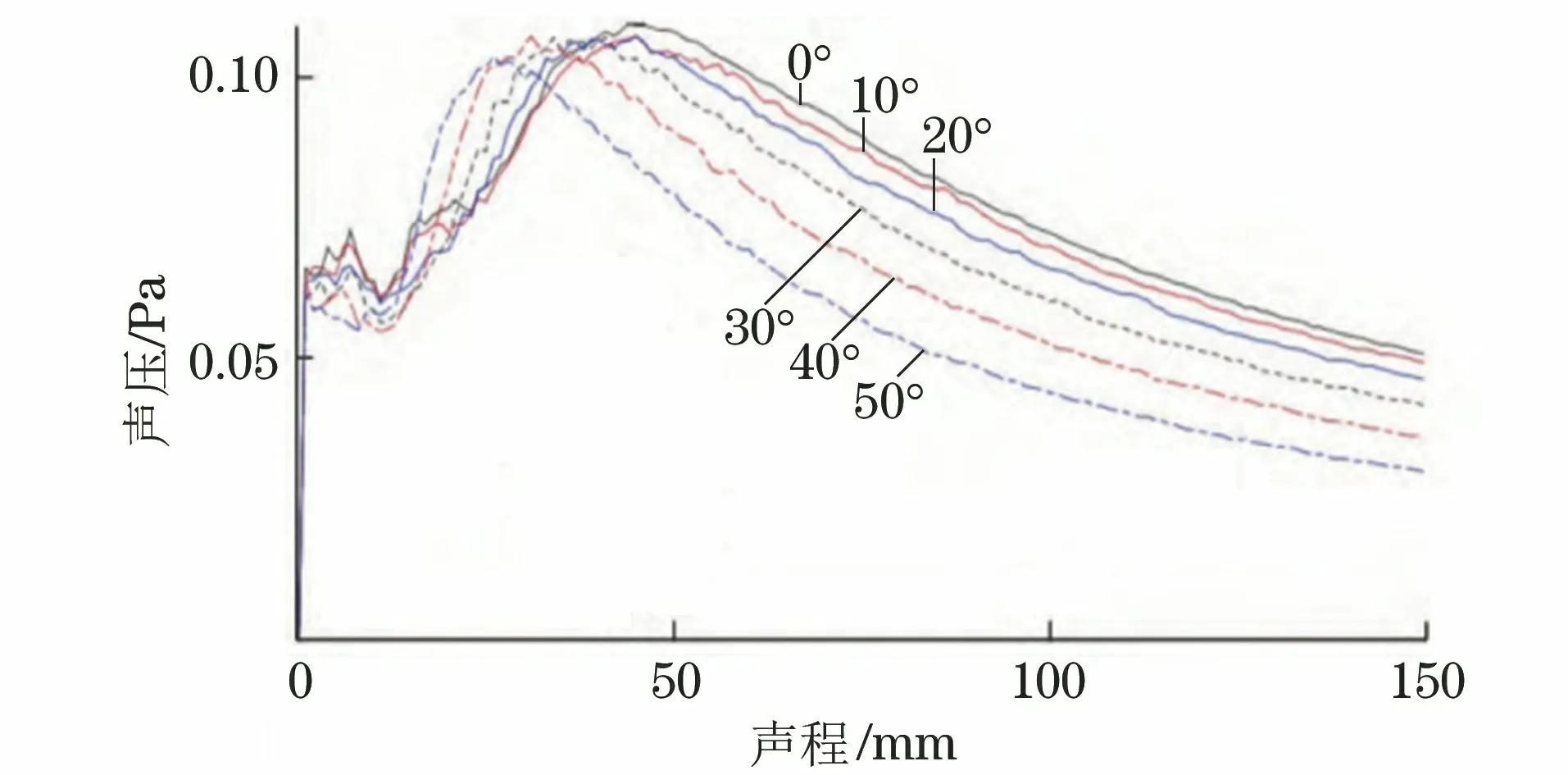
图3 相控阵纵波检测中不同偏转角度下声压与声程的关系
也有学者研究了相控阵超声横波检测中声束聚焦对检测的影响。图4所示为5L64-A12探头在使用SA12-N55S楔块时,45°折射横波在不同深度聚焦时的灵敏度仿真结果[2]。但该研究主要集中在定位和测量缺陷尺寸方面,并未对不同孔径和聚焦深度下检测的绝对灵敏度进行比较,因此笔者在这个方面进行了尝试。
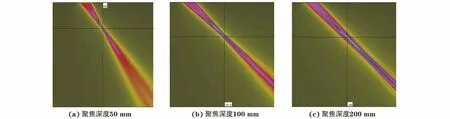
图4 相控阵超声横波检测灵敏度仿真结果
2 试验方案
2.1 试验设备
(1) 主机:奥林巴斯OmniScan X3 32128PR型。
(2) 使用了如下两个A32探头:① 型号为5L64-A32,频率为5 MHz,64晶片,晶片中心距为0.5 mm,次轴方向长度为10 mm;② 型号为5L32-A32,频率为5 MHz,32晶片,晶片中心距为1 mm,次轴方向长度为10 mm。
(3) 楔块:SA32-N55S楔块。
(4) 试块:CSK-IIA-3试块,目标反射体为不同深度的φ2 mm×60 mm长横孔。
(5) 耦合剂:机油用于楔块与工件的耦合,凡士林用于探头和楔块的耦合。
2.2 试验过程
采用8,16,32 mm等3种激活孔径进行检测试验。
试验分为3组,第一组试验分别采用8 mm×1 mm和16 mm×0.5 mm激活设置,激活孔径均为8 mm;第二组试验分别采用16 mm×1 mm和32 mm×0.5 mm激活设置,激活孔径均为16 mm;第三组试验采用32 mm×1 mm激活设置,激活孔径为32 mm。
为了避免不同孔径尺寸的声束在楔块内传播的声程变化,所有组的激活孔径均以探头中心为中心对称分布,如8 mm×1 mm的激活孔径是激发5L32-A32探头的1320号晶片,16 mm×0.5 mm的激活孔径是激发5L64-A32探头的2540号晶片。
通常的横波检测是有角度范围的扇形扫查,不同角度的聚焦效果、灵敏度等也有差异,不便于直接比较。试验使用的是自然折射角为55°横波的楔块,因此测量的是无需电子偏转的55°横波下的灵敏度。同时为了避免不同楔块磨损程度不同等因素带来的灵敏度差异,两个探头使用了同一个楔块。
第一组激活孔径尺寸较小,分别聚焦在10,20,40 mm深处,检测1,20,40,60,90 mm深的目标反射体。
后两组激活孔径尺寸较大,分别聚焦在20,40,60,90,130,180 mm深处,检测10,20,40,60,90,130,180 mm深处的目标反射体。
将每个目标反射体回波调整至满屏高度的80%,记录增益并以此作为检测灵敏度。每个点测试3次,求其平均值作为该点的灵敏度。
3 试验结果及讨论
3.1 近场区计算
尽管笔者在设置聚焦深度时并未考虑近场区的问题,但近场区长度对分析实际测定的数据仍有很大意义,因此首先进行了近场长度及深度计算。在不使用电子偏转条件下,可使用常规超声横波斜探头对第二介质中的近场区长度进行计算[3],如式(1)

(1)
L1需要根据楔块参数进行计算,因为试验中所有激发方式均相对探头中心线对称,所以只需要计算探头中心处距声束入射点的距离L1,其计算公式为

(2)
式中:H1为楔块上第一晶片高度;A为探头的总激活孔径。
DN=·cosβ
(3)
经计算,3组不同激活孔径下钢中近场区长度及深度如表1所示。
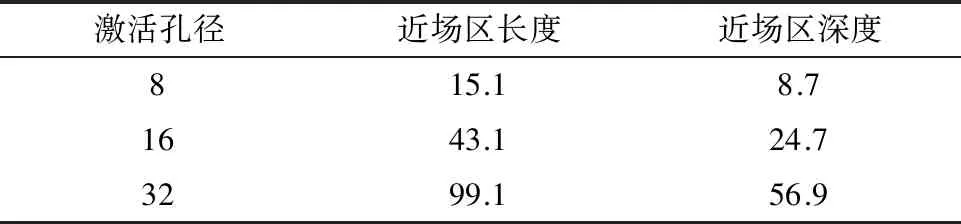
表1 3组不同激活孔径下钢中近场区长度及深度 mm
3.2 相同激活孔径下聚焦深度对灵敏度的影响
图5为第一组8 mm激活孔径下,检测灵敏度与聚焦深度的关系;图6为第二组16 mm激活孔径下,检测灵敏度与聚焦深度的关系;图7为第三组32 mm激活孔径下,检测灵敏度与聚焦深度的关系。图57中点的高度越高,代表该点达到80%高度时所需增益越大,检测灵敏度越低。
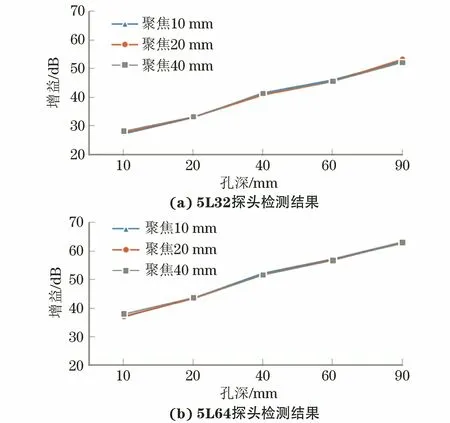
图5 8 mm激活孔径下检测灵敏度与聚焦深度的关系
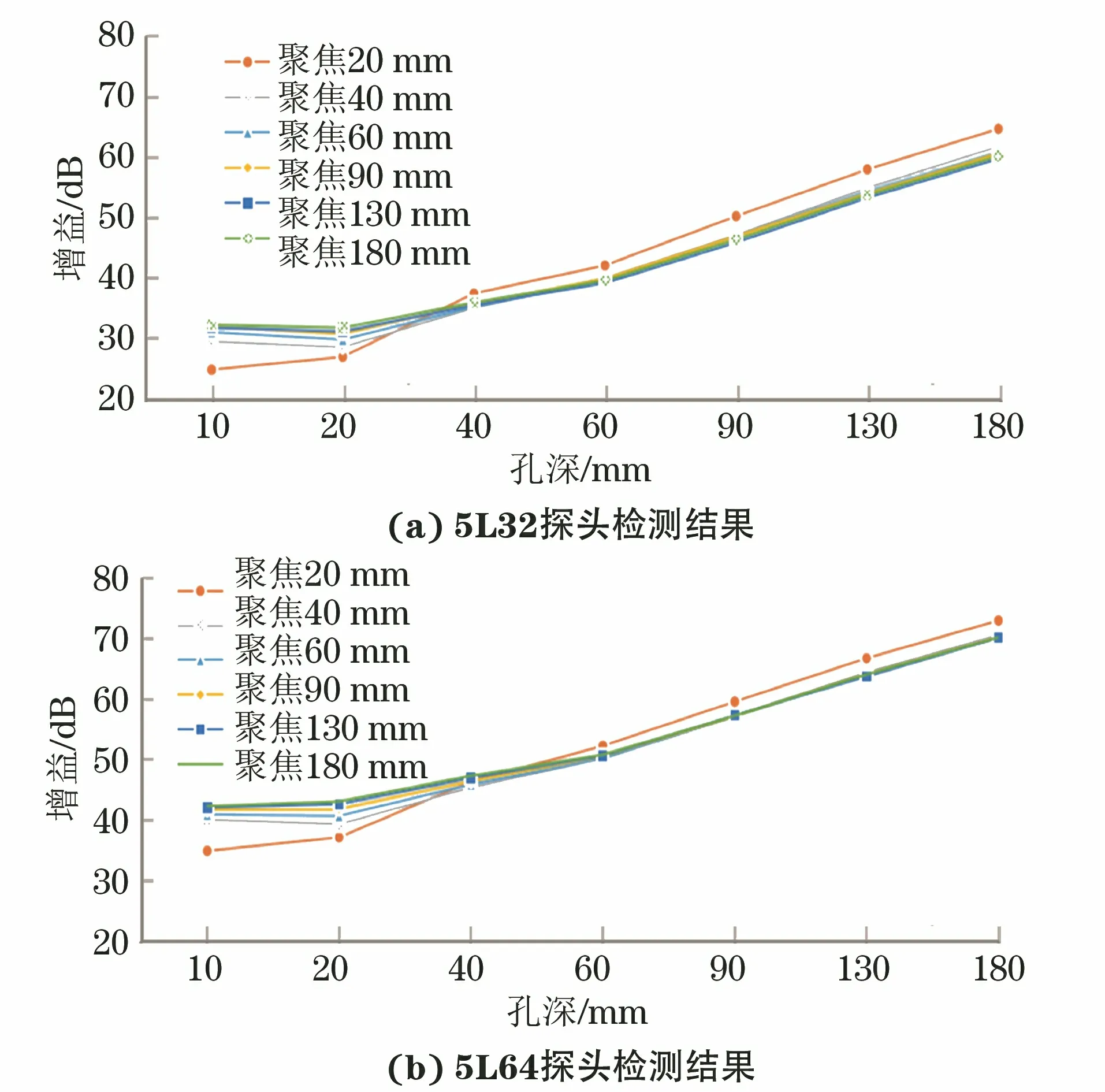
图6 16 mm激活孔径下检测灵敏度与聚焦深度的关系
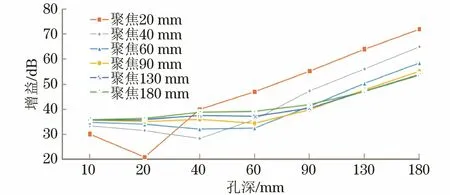
图7 32 mm激活孔径下检测灵敏度与聚焦深度的关系
第一组试验中5L32探头在不同聚焦深度设置下的灵敏度曲线几乎完全重合,5L64探头也是如此,同时两幅图中曲线形状几乎完全相同,只是图5(b)的数据比图5(a)的数据整体高了大约10 dB。曲线几乎重合是因为当激活孔径只有8 mm时,理论上钢中55°的近场区深度只有8.7 mm,聚焦深度无论设置为10,20 mm还是40 mm,声束均为非聚焦状态,其声场实际上是相同的,所以曲线形状相同。两组曲线高度有差异是由于在相同激活孔径下,晶片数多的探头,晶片间隙更多,实际的晶片面积占比更小,造成激发能量下降,产生了灵敏度的差异。
第二组试验中,图6(a),(b)两幅图的情况与第一组试验相似,同聚焦深度的曲线在图6(a)中比图6(b)中低大约10 dB,即相同激活孔径下晶片数越多,检测灵敏度越低。
由于该组既有近场区内聚焦也有近场区外聚焦,故可以对比聚焦对灵敏度带来的影响。以图6(a)为例,当聚焦点在20 mm深处时,孔深10 mm处的增益比20 mm处的更低,意味着其灵敏度比20 mm处更高。造成这种现象的一种可能原因是近场区内声束能量较为均匀,聚焦带来的灵敏度增加并不明显,同时由于10 mm处声程近,衰减小,因而波幅反而高于焦点处的。除了聚焦20 mm外,其他所有聚焦深度中均是20 mm孔深处灵敏度最高。其原因如表1所示,激活孔径为16 mm时,近场区终点深度为24.7 mm,意味着未聚焦的声束在深24.7 mm处声压达到最大值,因此当聚焦设置在近场区之外时,深度为20 mm的孔附近灵敏度最高。
另一个值得注意的现象是,聚焦在20 mm的声束在远场区域的灵敏度明显低于其他声束,而且曲线倾斜程度更大。也就是说,当聚焦在近场区内时,焦点附近可以获得更高的灵敏度,但是在越过焦点之后,声束的能量降低得也更快。
第三组只有激活孔径为32 mm×1 mm的一组数据,可以看到,由于激活孔径增大,该组的聚焦效果更加明显,当聚焦深度为20 mm时,孔深20 mm处的检测灵敏度较同曲线其他孔深及不同聚焦深度的20 mm孔深处的检测灵敏度都有了10 dB以上的显著提升,同时可以看出,聚焦40 mm深处时,孔深40 mm处的检测灵敏度也显著优于同曲线的其他孔及其他聚焦深度的40 mm孔深处的灵敏度。
该组近场区深度为56.9 mm,因而聚焦在60 mm以上的声束在60 mm以外区域曲线逐渐重合,而聚焦在20,40,60 mm处的曲线在越过各自焦点后,其灵敏度也快速下降。与图6的情况类似,当聚焦在近场区以内时,声束在越过焦点之后快速衰减,焦距越小越过焦点后的灵敏度越差。
值得注意的是,如图7所示,当声束处于未聚焦状态时,其灵敏度在整个深度范围内更均匀,意味着在检测大厚度工件时,将声束设置为未聚焦状态时可以在更大范围内得到较为均匀的灵敏度。
然而,当聚焦深度为90,130,180 mm时,按照理论计算结果,其聚焦深度已远远超过近场区深度,声束应该都是非聚焦状态,这3条曲线应该是完全重合的,但3条曲线在差异最大的地方(60 mm深度处),增益相差了4.7 dB,已远远超过了检测数据的误差范围,但该现象尚未找到有效的解释。
通过对这3组数据进行分析,得出以下结论。
(1) 观察近场区内声场的能量变化,发现同常规超声一样,实测的相控阵声场并没有多个能量极大值,而是只有一个极大值或没有极大值。出现极大值分为两种情况:当聚焦在近场区内时,能量极大值位于焦点附近;当聚焦在近场区外时,能量极大值位于近场区附近。也可能由于焦距接近近场区,整个焦距范围内声束能量较为均匀,聚焦带来的焦点处能量增加并不明显,同时衰减的影响超过聚焦的影响,使整个声束能量呈现单调递减的状态,如图7聚焦180 mm曲线及图6(a),(b)的聚焦20 mm曲线。
(2) 焦点设置在近场区内时可以有效聚焦,获得焦点附近的更高灵敏度,但是在越过焦点之后灵敏度下降速度快于非聚焦状态下的;焦点设置在近场区外时,声束为非聚焦状态,整个深度范围内灵敏度与焦点设置的具体位置无关。
(3) 从灵敏度角度来看,聚焦可以提高焦点附近灵敏度,非聚焦声束的整个声场灵敏度较为均匀。
3.3 特定检测深度时激活孔径及聚焦深度对灵敏度的影响
实际工作中还有一种情况,在有明确的关注深度范围或已知缺陷的大概埋深时,为了得到较高检测灵敏度,需要选择合适的激活孔径和聚焦深度。针对这种情况,笔者绘制了特定深度时,激活孔径和聚焦深度与灵敏度的关系曲线,如图8所示。
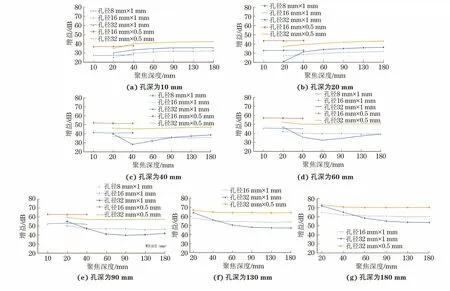
图8 特定深度时,激活孔径和聚焦深度与灵敏度的关系
通过对这几组数据进行分析,可以得到以下结论。
(1) 在激活孔径尺寸相同的情况下,不同晶片数的探头声场变化趋势相同,而晶片数更少的探头由于晶片间隙更小,有效晶片面积占比更大,所以灵敏度更高。
(2) 在单个晶片尺寸相同的情况下,在声程较长的区域,更大的激活孔径聚焦效果更好,焦点处灵敏度更高,但是在声程较短的区域,该结论不一定成立。
实际工作中除了灵敏度之外,还应关注其信噪比。相控阵超声检测中的噪声主要来自3个方面:① 仪器电噪声;② 材料内部晶粒噪声;③ 由栅瓣旁瓣引起的噪声。其中电噪声会随着增益的增大而增大,晶粒噪声与缺陷信号同步起落,栅瓣旁瓣引起的噪声较为复杂,其与单个晶片宽度与波长的比值有关,也与偏转角度和焦距有关。因此,在不考虑栅瓣旁瓣问题的情况下,可以认为较高的检测灵敏度降低了检测所需增益,对信噪比有一定优化作用。
4 结语
通过测定3组激活孔径和不同聚焦深度下,一系列不同深度横通孔在55°横波下的检测灵敏度,得到以下结果,聚焦会提高焦点处的灵敏度,且大多数情况下有效晶片面积占比越大灵敏度越高,但越过焦点之后,相比未聚焦状态,灵敏度会下降得更快。因此在实际工作中,针对不同的检测区域,应根据不同探头的声场能量分布选择合适的检测工艺,以得到更优化的检测效果。
猜你喜欢
农业工程学报(2022年10期)2022-08-22
煤炭工程(2022年7期)2022-07-21
电子工业专用设备(2022年1期)2022-07-13
河南科技学院学报(自然科学版)(2022年3期)2022-06-10
矿业安全与环保(2022年2期)2022-05-20
北京航空航天大学学报(2021年4期)2021-11-24
舰船电子对抗(2019年5期)2019-12-04
民用飞机设计与研究(2019年4期)2019-05-21
中国纤检(2018年8期)2018-09-07
现代计算机(2009年5期)2009-08-27