摩托车头盔佩戴检测算法研究综述
2022-08-03 01:47张之云苏山杰
汽车文摘 2022年8期
张之云 苏山杰
(重庆交通大学机电与车辆工程学院,重庆 400074)
主题词:摩托车头盔 佩戴检测 深度学习 目标检测
NMS Non Maximum Suppression
KNN K-near Neighbor
SIFT Scale Invariant Feature Transform
LBP Local Binary Patterns
HOG Histogram of Oriented Gradient
HOI Human Object Interaction
CNN Convolutional Neural Network
SPP Spatial Pyramid Pooling
FCN Fully Convolutional Networks
SSD Single Shot Multi Box Detector
RSSD Rainbow-SSD
SVM Support Vector Machine
RPN Region Proposal Network
YOLO You Only Look Once
ROI Region of Interest
GPU Graphics Processing Unit
COCO Common Objects in Context
MAP Mean Average Precision
CSPNet Cross Stage Partial Networks
DIoU Distance Intersection over Union
CBAM Convolutional Block Attention Module
1 引言
一些欠发达地区,摩托车作为出行的主要工具,驾驶的安全问题越来越受到社会的关注。摩托车头盔的佩戴对驾驶员的安全十分重要。据世界卫生组织(WHO)预测,2022 年中国的摩托车保有量达到7 925.1 万辆,到2030 年摩托车保有量下降到7 500 万辆。摩托车事故中,头部受伤是导致死亡的主要原因。正确佩戴头盔能降低42%的死亡率和69%的受伤率,摩托车头盔能有效的保障驾驶者及乘客的安全。因此,在行驶过程中能及时有效的检查驾驶人员的头盔佩戴情况对减少交通伤亡事故非常重要。
最原始的头盔佩戴检测方法是交通部门派遣工作人员现场监督。这种检测方法存在许多弊端,首先需要大量的资金和人力资源的投入,同时检查效率变低、危险性大、容易造成道路拥堵的情况。
随着计算机科学的迅速发展和智能交通的兴起,对于一些特定场景下的目标可以采取自动检测的方法,这些方法可以分为传统的机器视觉检测方法和基于深度学习的检测算法两种类型。本文先对摩托车头盔检测方法进行综述,总结目前存在的问题,最后对摩托车头盔佩戴检测方法的未来发展进行展望。
2 传统计算机视觉技术的摩托车头盔检测
计算机视觉技术使机器能够通过相关设备和计算机来获取图片的信息,对人类视觉进行模拟,最终能够对物体起到识别的作用。如图1 所示,传统的目标检测方法主要分为感兴趣区域的划分、特征的提取和分类以及回归4 个步骤。到目前为止,国内外许多研究者对摩托车头盔的检测做了大量的研究,以下是基于传统计算机视觉的摩托车头盔检测的相关工作。

图1 传统目标检测算法流程
使用头盔检测或搜索的方法来确定摩托车头盔能有效提高检测系统的效率和鲁棒性。Chiu等提出了一种计算机视觉系统,用于检测和分割被遮挡的摩托车。该方法使用视觉长度、视觉宽度和像素比来检测被遮挡的摩托车,并将摩托车从中分割出来。再使用头盔检测或搜索的方法来确定头盔是否存在,该方法克服了遮挡问题。Waranusast R 等提出了一种自动检测摩托车驾驶员和安全头盔的系统。该系统使用K-最邻近(KNN)分类器,根据特征进行摩托车分类,然后对驾驶员的头部进行计数和分割,该方法根据4 个部分的头部特征对戴头盔与不戴头盔进行分类。R.Silva等,提出了一种基于局部二进制模式,采用定向直方图和霍夫变换描述符的特征提取混合描述符。使用摄像机捕获的交通图像,从而对摩托车头盔进行检测。Chiverton等使用基于边缘直方图的特征来检测摩托车驾驶员,这种方法的优点在于它不会受边缘直方图以及视频中光照强度的影响。由于边缘直方图使用圆形霍夫变换来比较和分类头盔,因此导致对头盔的许多错误分类。Silva等提出了一种系统来处理卡尔曼滤波器跟踪车辆的错误分类问题。卡尔曼跟踪系统的一个显著优点是能够连续跟踪物体,即使它们稍微被遮挡。但是当2 个或3 个以上的摩托车手出现在同一帧中时,卡尔曼滤波器会失败,因为卡尔曼滤波器主要适用于线性状态转换。但是要跟踪多个对象时需要非线性函数。Dahiya K 等提出了3 种特征表示方法:尺度不变特征变换(SIFT)、局部二值模式(LBP)和方向梯度直方图(HOG)。分两个不同的阶段实现:首先利用背景减法和目标分割法从监控视频中检测驾驶员。然后利用视觉特征和分类器判断驾驶员是否戴头盔。第一阶段检测驾驶员,第二阶段定位驾驶员的头部并检测头盔。针对传统的目标检测方法中效率低以及时间成本大的问题,张乾雷等采用了一种基于并行点检测和点匹配的单阶段HOI Detection 方法。先采用新的全卷积方法对人与物体之间的相互作用直接进行检测,通过网络预测交互点人物交互进行分类和定位,与密集预测的交互向量配对,通过人类和物体检测相关联来获取检测结果。与传统的两阶段算法相比,HOI算法的检测精度与准确率都有了很大提高。
传统机器学习,这类方法大多是依靠人为的设计来选取特征,需要实验者具有扎实的专业知识和丰富的实验经验,特征设计的过程十分复杂,不但费时费力,而且不能获取良好的特征、检测速度慢、精度低也难以适应复杂的条件变化。经过不断迭代研究,计算机视觉技术正从机器学习向深度学习神经网络技术方向发展,它不仅速度快、精度高,在整体的检测性能指标上都能有大的提升,这为目标识别技术领域未来发展提供了新动力。
3 基于深度学习的摩托车头盔检测算法
近几年,深度学习目标检测已经成为图片及视频识别和分类的主流方法,使用卷积神经网络自动对图像进行特征进行提取,从而对目标进行识别和定位。深度学习检测算法可以从区域建议和回归2个方面划分为双阶段和单阶段2 种不同的类型。表1 将双阶段与单阶段的检测算法在不同的功能上进行了对比。
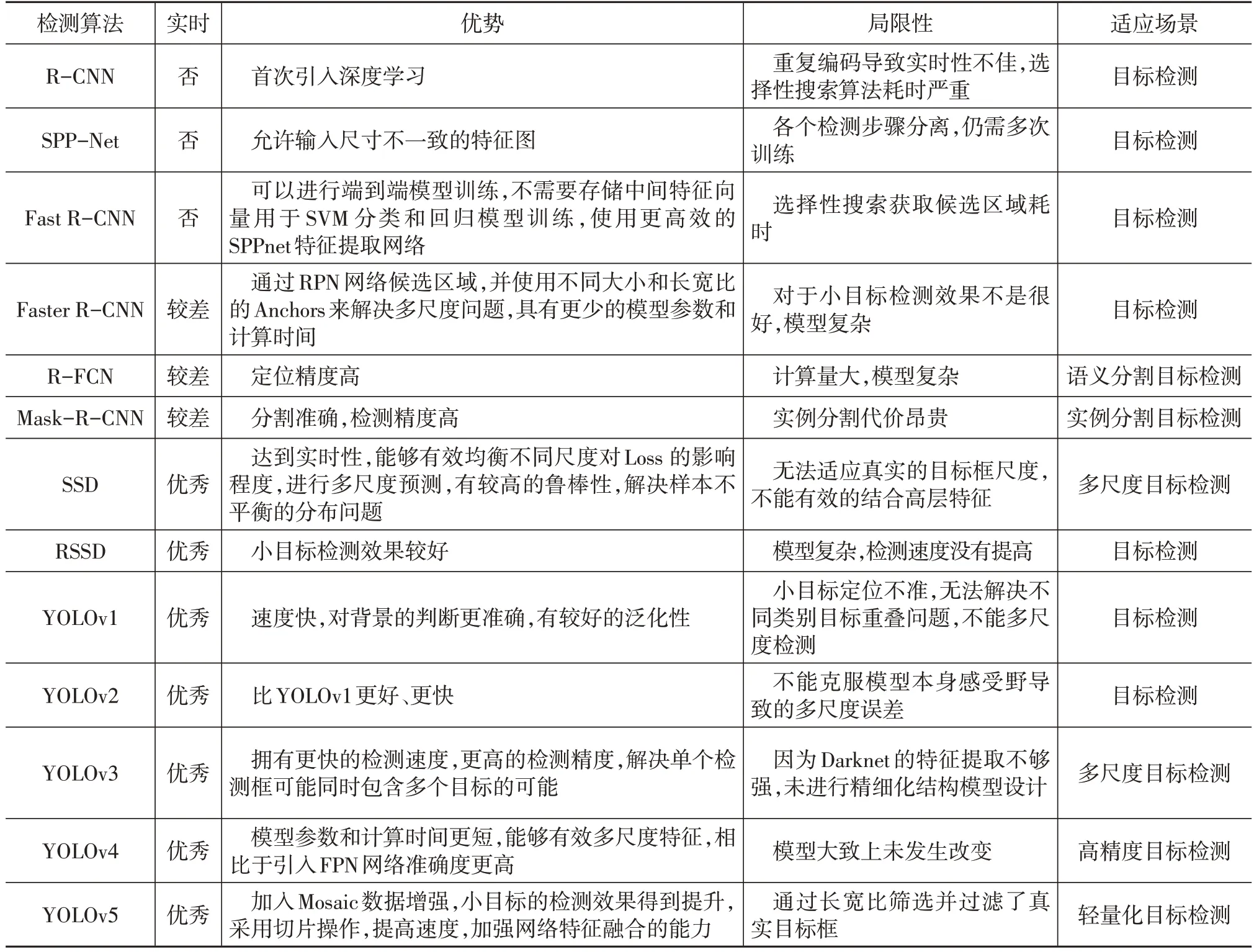
表1 双阶段与单阶段检测算法的性能对比
3.1 双阶段的摩托车头盔检测算法
双阶段的摩托车头盔检测算法主要以Faster RCNN 为主。该方法先利用算法来获取候选区域,再通过卷积神经网络对样本进行分类。图2 是Faster R-CNN 的整体结构,Faster R-CNN 首先使用一组基础卷积层提取图片的特征,该特征图被共享用于后续的RPN 层和全连接层,RPN 网络用于生成候选区域,该层通过Softmax 判断Anchors 属于前景还是背景,再利用边界框回归来修正Anchors 获得精确的预测框。使用ROI pooling 层来综合输入特征图和候选框的信息,提取候选特征图,在后续的全连接层判定目标类别。

图2 Faster R-CNN的整体结构[10]
Yogameena 等提出的系统基于Faster R-CNN 来检测标记的前景目标中的摩托车,以确保摩托车驾驶员的存在。随后,Faster R-CNN 也被用于检测是否戴头盔的摩托车驾驶员。由于目标检测过程会受到分辨率、天气条件和光照条件不同因素的影响,无法达到理想的检测结果。Afzal A 等提出了一种监控视频自动检测摩托车驾驶员是否佩戴头盔的方法。首先,应用候选区域网络RPN对卷积得到的特征图进行候选框选取,对头盔进行检测,最后再对检测到的头盔进行识别。试验结果表明,实时监控视频对摩托车头盔的检测准确率达到97.26%。
相比于传统的检测算法,深度学习的双阶段目标检测算法降低了原来的计算量,加快了检测速度。应用网络自动提取候选区域的特征,解决了获取特征信息不足的问题,提高了检测精度。利用多类别分类器推断类别概率,并使用边界框回归模型求出预测框的修正位置,使其更接近真实框,从而改善了算法的整体检测性能。单阶段网络能够达到实时的效果,更具备实用价值,因而大多数研究都是针对单阶段算法。
3.2 单阶段摩托车头盔检测算法
单阶段算法一次性完成对物体的分类和定位,与双阶段检测算法比,这种方式运算速度更快,能够达到实时检测的效果,其主要以YOLO、SSD 算法为代表。
Dasgupta 等提出了一个框架,用于检测不戴头盔的单人或多人骑摩托车骑行。在建议的方法中,在第一阶段,使用YOLOv3 模型来检测摩托车驾驶,在第二阶段,提出了基于卷积神经网络(CNN)的体系结构,该结构受到YOLO-Lite 网络结构的启发,减少了网络结构层数,并且GPU 设备使用Batch Nor⁃malization 来检测摩托车驾驶员的头盔。Khan 等提出了一种计算机化的机器结构,以区分有或没有头盔的摩托车驾驶员与图像,系统基于特征提取对象类。该系统使用YOLO-Darknet 深度学习框架,考虑到网络的大小使用了YOLOv3-Tiny,通过以往在CO⁃CO 数据集上预训练,然后在摩托车检测数据集上进行微调来实现对摩托车驾驶员头盔佩戴情况的检测。针对现有的安全头盔佩戴检测正确率不高的问题,薛瑞晨等提出了一种改进的YOLOv3。将空间与通道的注意力模块进行特征融合,并结合密集连接网络来提高特征提取效果,并且引入了空间金字塔池化结构以增强特征,检测精确度能达到93.29%。刘琛等对主流的单阶检测网络SSD-Net引入类似视觉机制的模块,对网络特征图在通道和空间上进行了权重的重新选择,并增加了类似人类视觉偏心率机制的RFB 模块。通过使用Mosaic 方法进行数据增强,并采用余弦衰减学习率来优化网络。试验结果表明改进后的网络对摩托车头盔佩戴的检测结果比原始SSD-Net 提升了4%的mAP(Mean Average Precision),具有更好的应用效果,也被用于检测摩托车驾驶员佩戴头盔情况。王海宽等在Yo⁃lov3 网络中加入跨阶段局部网络(CSPNet)来改进darknet53 的骨干网络,降低了计算成本,其次通过空间金字塔池(SPP)结构,结合自上而下和自下而上的特征融合策略来改进多尺度预测网络,达到特征增强和提升精度。Tan 等基于YOLOv5 增加检测的尺度来获取更小的目标,然后用DIoU-NMS 代替NMS,使其在抑制预测的边界框时更加准确,该算法显著提高了精度,可满足实时检测的需要。为了加强对施工人员的安全监督,提高检查效率,Zhou 等对YOLOv4 算法的卷积神经网络的损失函数进行替换,通过改变注意力机制来提高检测网络对于微小物体的敏感度,并且添加参数来解决类别不平衡的问题。试验结果表明,改进的算法提高了网络模型在检测和识别安全头盔佩戴的准确性。
采用候选框的双阶段检测算法准确率较高,但是网络的模型较大且结构复杂,运算量大,检测的速度较慢。目前较为受欢迎的单阶段算法具有较好的检测性能,特别是对简单目标来说,更能满足实时性和准确性的要求。
4 摩托车头盔检测面临的问题
4.1 复杂场景下的摩托车头盔数据集的获取问题
由于摩托车驾驶环境的多样性、路况的复杂性,采集的图片和视频较为片面,现目前的数据集主要通过网络进行收集或者针对特定情况下拍摄的图片和视频获得,图片单一、数量也比较少,导致对模型的训练效果不是很好,从而影响模型的判断力,降低了检测精度。更全面的数据集应涵盖真实环境下所出现的情况,能够提高模型在不同情况下的鲁棒性。赵睿等对马赛克数据增强方式进行改进,增加了不同光照强度的小尺度样本数据集,将图片的拼接数量由原本的4张增加到了9张,增加小样本的数量,剔除了多余的边缘面积来加快模型的训练速度。考虑多种不同环境条件会增加数据集的多样性,对提高模型的鲁棒性有很大的帮助。
4.2 远距离、小目标和遮挡时摩托车头盔识别问题
对于远距离头盔的检测仍存在可用的特征少、定位精度不高、小目标易聚集问题,很难提高检测精度,摩托车的头盔检测比施工现场复杂,远处有更多的小目标。此外,在骑行过程中,目标的定位比较困难,驾驶员的头脑更容易在图像中聚集,从而引起车辆被遮蔽的问题,这给检测任务带来了更大的挑战。
现在较先进的YOLO 算法已经能够在速度和精度做到很好的平衡,针对远处小目标和密集型目标的检测准确率还是有很大的提升空间。近几年也有许多研究者提出了相应的改进办法,Wang等提出了一种改进的基于YOLOv5 的头盔佩戴检测方法YO⁃LOv5s-FCG,在YOLOv5 系列中YOLOv5s 体积最小的基础上,对网络进行改进,增加了浅层特征检测层,将3 个尺度特征检测改为4 个尺度的特征检测,添加CBAM 注意力模块,使用轻量级的Ghost Bottleneck 代替Bottleneck。该算法不仅保证了检测率、体积、参数量,而且提高了检测精度。对弱光、小目标的复杂道路环境具有良好的适应性。因此,针对非常普通的使用条件对算法进行改进,能够明显提高检测模型的实用性。
5 总结与展望
本文分别对传统的机器视觉与基于深度学习的摩托车头盔佩戴检测算法进行了综述,早期实施的传统方法在头盔识别方面虽然能达到不错的效果,但对于特征的选取主要依赖人为决定,而且需要较高的专业领域的知识和大量的人力和物力。另外,容易受天气、光线和位置形态因素的干扰,算法相对复杂,而且性价比不高。而使用卷积神经网络对图片自动进行由浅到深的特征提取,使模型能够学到数据中更高层次的信息,并且随着数据集质量的越高,模型提取特征层次的能力就越强。基于深度学习的单阶段算法比双阶段算法的模型更简单,检测速度也能满足实时检测的要求。但针对目前数据集的质量、应对复杂特征的识别能力还有待提高。
不同模型的训练流程和策略都不同,当前的目标检测模型具有更复杂的网络结构和优化目标。未来,不同的优化方法应被更多地应用到各个算法当中。主要从数据、网络结构优化、损失函数、训练调参方面进行改进。主要的目的在于未来摩托车头盔检测网络能达到高精度、高速度、较强的泛化能力。将改进后的模型能应用于计算量小的嵌入式设备中,比如交通部门的智能监控、摩托车安全启动系统监测设备中。一方面,加强对摩托车戴头盔佩戴情况实时监督,降低摩托车驾驶违规行为,从而提高行驶安全性并保障道路交通顺畅。另一方面,随着交通的智能化发展,将头盔佩戴情况的实时检测器与摩托车头盔提醒系统结合起来,并使用后台服务器进行记录,搭载提醒式的摩托车可以减少非法行为的发生,对摩头车智能驾驶的发展有一定研究意义。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
汽车实用技术(2022年7期)2022-04-20
汽车实用技术(2022年4期)2022-03-07
小天使·一年级语数英综合(2021年3期)2021-05-08
户外探险(2017年3期)2017-03-11
小学生导刊(低年级)(2016年8期)2016-09-24
智慧少年(2016年2期)2016-06-24
儿童故事画报·发现号趣味百科(2015年3期)2015-12-04
中学科技(2015年11期)2015-11-25
语文世界(初中版)(2014年5期)2014-10-14