基于光纤光镊的长距离微粒可控操纵
2022-08-02 08:53:14姜春雷水华胜
光学精密工程 2022年13期
姜春雷,水华胜,陈 朋,方 硕,王 弢
(东北石油大学 电气信息工程学学院,黑龙江 大庆 163318)
1 引 言
微纳米颗粒或生物细胞的光学操纵一直是研究热点[1-3]。自从美国贝尔实验室的Ashkin 利用单束激光引入高数值孔径物镜形成三维光学势阱,实现对微粒的非接触三维空间俘获后,光镊技术开创了光学微观操控研究的新纪元。然而,传统的光镊利用散装光学元件通过相位调制产生多个梯度光学势阱,系统结构复杂,且大数值孔径物镜的工作距离较低,严重限制了对微粒或细胞的光学操纵。为了克服这些限制,研究人员采用光纤光镊对细胞或微粒进行操纵[4-5]。与双光束光纤镊子[6-8]和微纳米光纤的光学操作[9-10]相比,基于单光纤尖端的锥形光纤光镊紧凑灵活,具有更大的应用潜力。但锥形光纤光镊输出光强烈聚焦在光纤尖端附近,导致粒子或细胞的操纵距离受到限制[11-14],如同光学显微镜中工作距离短的物镜,使得光纤光镊的使用变得不灵活,并且由于光纤光镊的操作距离短,细胞靠近光纤端口,可能会对生物样品造成损伤。因此,具有长距离操纵的光纤光镊对于实现真正的非接触光学操纵具有重要意义。
在过去的十几年,研究人员对如何产生具有长距离操纵的光纤光镊展开了大量研究。2012年,李等利用亚微米锥形光纤探针实现了高度灵活的粒子捕获、驱动和精确排列[15]。2013 年,Liu等利用模分复用技术实现了单光纤捕获系统中被捕获微粒的轴向捕获位置动态调整[16]。通过改变基模光束(LP01)和低阶模光束(LP11)两种模式光束的功率比,控制捕获的直径为6 μm 酵母细胞沿光轴方向移动3 μm。2015 年,张等提出一种梯度折射率光纤镊子[17-19],在单模光纤和梯度折射率光纤之间引入空气腔,通过调节激光的输出功率、空气腔的长度以及流速来改变操作距离。空气腔是由两种不同的光纤对齐拼接而成,在调整空气腔的长度时有些许复杂。2019 年,Liu 等利用倏逝波稳定地将纳米颗粒和细胞捕获在由天然生物细胞组装而成的光学传送带表面[20]。通过调节注入激光的相对功率,粒子或细胞可以沿着生物传送带实现双向传输。引入两个反向传播光束的双光束光阱可能对粒子或细胞的传输距离存在限制。2021 年,Mumati 等提出一种用波长2 μm 的掺铥光纤激光器进行光热泳来俘获微粒的方法[21]。由于激光束被水溶液强烈吸收,在焦点周围产生局部温度梯度,最终颗粒沿温度梯度迁移并聚集在距焦点125 μm 的地方。如果应用在生物细胞和组织运输领域,这种热效应[22]可能会对生物细胞和组织造成损伤。
为了实现结构简单的长距离可控操纵微粒或细胞的光纤光镊,本文利用改造的类锥形平口光纤探针在980 nm 的激光输出功率较低的情况下,提供一个大的散射力将粒子推离光纤端口,同时利用流体的阻力,从而可以对微粒进行长距离可控往返操纵。采用有限元分析法建立模型仿真类锥形平口光纤的光场分布,并结合麦克斯韦应力张量法推导出光阱力公式,分析捕获微粒的受力情况,通过仿真验证了该方法的可行性。
2 原 理
在光纤端口,微球主要受到两个力的作用:梯度力和散射力。梯度力是微球中电偶极矩在不均匀电磁场中受到的力,它正比于光强梯度的平方,指向光场强度的最大处,使微球被稳定俘获到光纤表面。光在散射过程中与光子交换动量获得散射力,其方向沿着光的传播方向,使微球沿着光束的传播方向运动。梯度力和散射力的合力被称为捕获力。捕获力与光的波长、粒子属性及粒子尺寸等因素密切相关。本文使用有限元分析法,通过解麦克斯韦方程对矢量光场的分布和变化进行精确描述。电磁场作用在体积为V粒子的光阱力F为:

通过高斯定理(或散度定理)可知,作用在体积V粒子的作用力可换算为作用其闭合曲S上的力。本文采用麦克斯韦应力张量法[23],真空中麦克斯韦应力张量的表达式为:
其中:ε0是真空中介电常数,μ0是真空中磁感应系数。麦克斯韦应力张量T有9 个分量:
这9 个分量具体为:
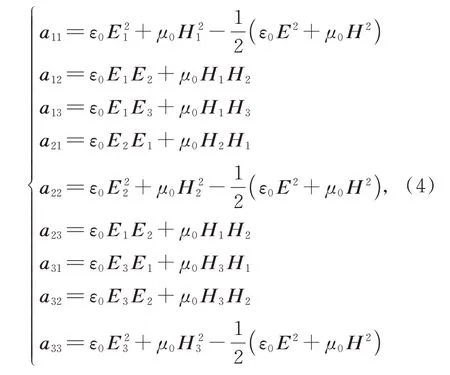
其中:ε1是介质中介电常数,μ1是介质中磁感应系数,E是电场矢量,H是磁场矢量。数字1,2,3 分别对应笛卡尔坐标系中的x,y,z三个分量。T的每个分量可表示为:
其中:Tij表示作用在垂直于j轴单位面积上的力在i轴上的分量。nj是垂直于j轴的微粒外表面S的向外法向量。其中:

因此,粒子在轴向上受到的光学力Fao可表示为[24]:

其中:对粒子周围的封闭曲面S进行积分,n为曲面法向量,TM为与时间无关的麦克斯韦应力张量,其计算方法如下:

式中:E是电场矢量,D是电位移矢量,H是磁场矢量,B是磁通量密度矢量,上标“*”表示共轭复数,I是各向同性张量。
普通抛物线形或锥形光纤在捕获微粒时,由于端口类似凸透镜,从而形成强汇聚场,微粒通常被捕获在光纤端口或者附近。如果对粒子或细胞进行长距离可控操纵,微粒可以双向运输,需要一个特定的光纤探针沿光轴提供一个大的光散射力,而不是将细胞捕获在光纤端口的光梯度力。本文提出了一个类锥形平口状的光纤探针,该光纤端口两侧结构类似于抛物线形,避免了光束在通过端口后向四周发散,降低了能量损失。其次端口呈现平口状,无法形成有效的强汇聚场,从而在轴向上对微粒始终表现为远离光纤探针尖端的光学力。为了验证抛物线形光纤与类锥形平口状光纤对微粒捕获的影响,本文通过有限元分析建立了一个仿真模型来分别对这两种不同结构的光纤进行仿真分析。两种不同光纤探针的仿真结果如图1 所示。
仿真中,水、光纤探针、聚苯乙烯微粒的折射率分别设置为1.33,1.46,1.59。聚苯乙烯微粒的半径设置为3 μm,激光的波长设置为980 nm,光纤端口的输入功率Pin=5 W/m。其中,图1(a)为抛物线形光纤的光场分布仿真和微粒在轴向上的受力分析;图1(b)为类锥形平口光纤的光场分布仿真和微粒在轴向上的受力分析。从图1 可以看出,光经过抛物线形光纤探针作用后的光场分布在探针端口附近,聚苯乙烯微粒在靠近光纤端口处受到一个负的光学力Fao,其作用是将粒子吸引并束缚在光纤端口,导致粒子无法进行长距离可控操纵,与本文实验要求不符。而光经过类锥形平口光纤探后汇聚的光场分布在离光纤端口约10 μm 处位置,微粒在轴向位置上受到一个正的光学力Fao,其作用是将粒子推离光纤端口,使得微粒存在双向运输的可能性。结合以上仿真结果,类锥形平口状光纤更符合本文的实验要求。
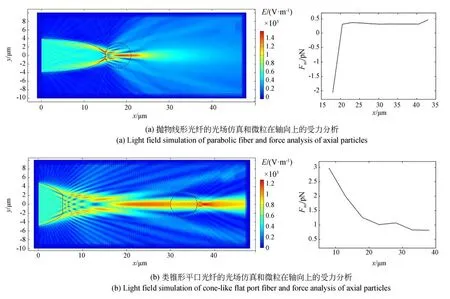
图1 两种光纤的仿真对比Fig.1 Simulation comparison of two optical fibers
本文采用拉制的类锥形平口状光纤探针进行实验。图2 为实验中使用的光纤探头及其结构参数。它是由一种普通单模光纤G.652D(康宁SMF-28e)经过加热和拉伸制作而成。首先,使用光纤剥离器将光纤最外层保护套和涂覆层剥离,再把光纤放置在酒精灯火焰下加热至光纤的熔点,加热区域沿光纤方向约为3~4 mm,加热约5 s 后,以大约为0.03 mm/s 的速度水平拉伸纤维,拉伸3 s 后,拉伸速度突变为0.05 mm/s,使光纤断裂。由于熔融石英材料表面的张力作用,光纤形成类锥形平口状端口。该方法具有很高的重复性,有助于大规模的生产及应用。
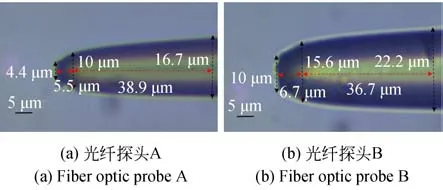
图2 光纤探头的光学显微图像Fig.2 Optical micrograph of fiber probe
实验采用中心波长λ=980 nm 的激光器作为光源,其光源输出功率P可在0~20 mW 内调节。在这个波长范围内,水和微粒的吸收都可以忽略。首先,将波长为980 nm 激光器的光直接耦合到由普通单模光纤G.652D(康宁SMF-28e)拉制而成的光纤探头中,然后将光纤探头固定在精密三维平台上,从而实现光纤探针的精确定位。用不锈钢毛细管(内径约为0.9 mm,壁厚约为0.1 mm,长度约为120 mm)包裹光纤探头,防止光纤探头断裂和弯曲。随后,将光纤探头浸入直径为6 μm 的聚苯乙烯(Polystyrene)微粒的悬浮液中,而装有聚苯乙烯微粒的悬浮液则放在精密三维台上。实验采用集成电荷耦合器件(Charge Coupled Device,CCD)摄像机、光学变焦镜头(Optem zoom 70XL)、物镜(20X,NA=0.40)以及增距镜(2×)的组合来观察细胞的光学捕获,并通过计算机进行实时监控,包括图像采集和视频记录。图3 为聚苯乙烯(PS)微粒长距离可控操纵实验装置。

图3 长距离操纵微粒的光纤光镊实验装置Fig.3 Experimental setup of fiber optic tweezers for longdistance manipulation of particles
实验利用溶液的蒸发力以及分子间的引力产生一个与光学力平衡的流体阻力Fv,实验模型如图4(a)所示。在载玻片的4 个角落分别粘有少量的蓝凝胶(用于固定载玻片和盖玻片),然后蓝凝胶上放置一层盖玻片,在盖玻片与载玻片之间注入配置好的聚苯乙烯(PS)溶液。需要注意的是,放置光纤探头处的端口高度要低于相对一侧端口的高度,其余两侧保持平行。其目的是为了减小放置光纤探针端口处溶液与空气的接触面积,从而降低该端口的蒸发力。放置光纤探头的一侧高度约为1.5 mm,相对一侧的高度约为3.0 mm。流体流向的控制原理如图4(b)所示,图中Fe代表左右两侧的蒸发力。因为放置光纤探针的左侧溶液与空气的接触面积要小于相对一侧溶液与空气的接触面积,所以放置光纤探头的左侧蒸发力要小于右侧的蒸发力,同时由于溶液与气体接触的表面层中的分子比液体内部稀疏,其分子引力小于溶液内部的分子引力,从而表面层中的分子受到指向溶液内部力的作用[25-27]。在张力和蒸发力的作用下,水会带动粒子向左侧运动,从而提供一个与光学力Fao方向相反的流体阻力Fv,通过两者之间的平衡,在光轴上实现微粒的捕获。对于球形细胞或微粒来说,流体阻力Fv可根据斯托克斯定律[28]表示为:

其中:η是溶液的黏度系数,r是微粒半径,v是流体的流速。
基于光纤光镊的聚苯乙烯微粒可控操纵工作原理如图4(c)所示。当细胞或微粒处于光纤探头端口处,在横向上,横向梯度力Ftg负责将微粒或细胞约束在光轴方向上,使微粒不发生偏离,从而实现三维空间捕获。在轴向上会受到轴向光学力Fao的作用,而轴向光学力Fao是由散射力Fas和轴向梯度力Fag共同作用的合力,它主要表现为将微粒或细胞推离光纤端口。其中,横向梯度力Ftg和轴向光学力Fao主要通过激光器光源的输出功率P来控制,并随着P的增大而增大,沿光传播方向逐渐减小。而流体阻力Fv的流向主要通过调整放置光纤探头一侧的高度和相对一侧的高度,它与轴向光学力Fao之间的平衡决定了微粒的轴向位置。

图4 基本原理Fig.4 Basic schematic diagram
3 实验结果及分析
3.1 光纤探针A 的实验
本文使用光纤探头A 在不同光源输出功率下对直径为6 μm 的聚苯乙烯微粒进行可调节操纵,其光学捕获过程的实验显微图像如图5 所示。其中,通过观察视频中光纤附近参考微粒通过单位距离内的用时来计算当前的流速v,共计测量了5 组记录,最后取其平均值计算出当前溶液中粒子的平均运动速度v=14.7 μm/s。本文将微粒中心与光纤端口的距离定义为微粒的操纵距离L。当t=0 s 时,如图5(a)所示,此时光源输出功率P为2.3 mW,聚苯乙烯微粒在L=11.1 μm的位置被稳定捕获,并作为微粒的初始捕获位置,逐渐增大光源输出功率并观察微粒移动情况。当光源输出功率P为3.5,4.5,5.6 mW 时,如图5(b)~5(d)所示,粒子的操纵距离L分别为13.3,28.9 和36.7 μm;当 光 源 输 出 功 率P为8.0,10.2,12.5 mW 时,如图6(e)~6(f)所示,操纵距离L分别为48.3,57.2 和62.8 μm。根据实验数据可得,当微粒处于光纤端口附近时,光学力变化梯度较为明显,微粒的移速较快;随着微粒逐渐远离光纤端口,微粒的移动趋势减缓,最终当t=13 s 时,如图6(h)所示,测得最大操纵距离L=65.6 μm,此时激光器输出功率P=15.0 mW。随后降低激光源的输出功率,发现操纵距离L随光源输出功率P的降低而逐渐减小,直至恢复初始距离。由此可知,通过调节激光器的输出功率可以操控聚苯乙烯微粒进行往返运动。实验的具体调节过程可参考附件视频,该视频是在相对稳定的状态下单独录制的。
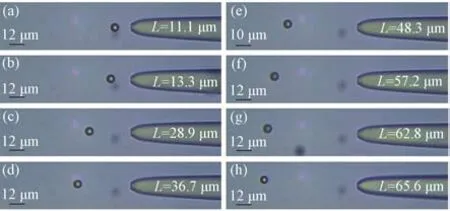
图5 光纤探头A 捕获聚苯乙烯微粒的显微图像Fig.5 Microscopic images of polystyrene particles captured by fiber probe A
3.2 光纤探针B 的实验
虽然在第一次实验中最大操纵距离L仅被调节到65.56 μm,但从理论上猜想,通过优化光纤探头的几何形状同样可以提高操纵距离L。因此,采用光纤探针进行对比实验。对比实验演示了光纤探头B 长距离操控聚苯乙烯微粒进行往返运动,结果如图6 所示。在t=0 s 时,如图6(a)所示,初始操纵距离L=23.3 μm,此时激光器的输出功率P=2.3 mW。由此发现,在光源输出功率相同的情况下,经过优化后的光纤探头B 的初始操纵距离约为光纤探头A 的一倍。随后,调节激光光源的输出功率P为3.5,4.5,5.6,6.8 mW,如图6(b)~6(e)所示,光纤探头B 对微粒的操纵距离L分别为32.2,38.9,43.3,66.7 μm。然后继续调节激光光源的输出功率P为8.0,9.1,10.2,13.7 mW,如图6(f)~6(i)所示,操纵距离L分别为80.0,86.7,94.4,97.8 μm。最终当激光器光源的输出功率P=15.9 mW 时,如图6(j)所示,测得光纤探头B 的最大操纵距离L=102.2 μm。根据实验数据可得,光纤探头B 的最大操纵距离远大于光纤探头A 的最大操纵距离,其约为光纤探头A 的1.56 倍,进而可以通过调整光纤探头端口的尺寸来调整粒子的操纵距离。
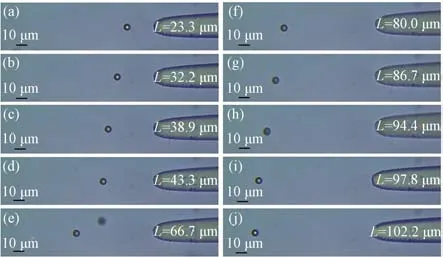
图6 光纤探头B 捕获聚苯乙烯微粒的显微图像Fig.6 Microscopic images of polystyrene particles captured by fiber probe B
3.3 分析讨论
两次实验结果得到激光器输出功率P与聚苯乙烯微粒操控距离L之间的关系,如图7 所示。从图7 可以看出,聚苯乙烯微粒的可控距离L随激光器输出功率P的提高而增大,并且光纤探头B 操纵微粒的距离远大于光纤探头A。由图2 可知,光纤探头B 的光输出端口宽度大约是光纤探头A 的2.3 倍,光场能够沿光轴覆盖更长的距离,从而使同样尺寸的微粒在相同流速下获得更长的操作距离。为了验证猜想的合理性,采用二维有限元方法分别对光纤探头A 和光纤探头B 进行了数值仿真,仿真结果如图8 所示。由图8 可知,光通过光纤探头A 端口后,在轴向上所形成的光场区域在距离光纤端口约20 μm 的位置,光轴的覆盖长度约为30 μm,微粒在靠近光纤探头A 端口处受到一个将粒子推离端口的正向光学力Fao,Fao沿光的传播方向逐渐减弱。而光源通过光纤探头B 端口后,在轴向上所形成的光场在距离光纤端口约45 μm 处,沿光轴的覆盖长度约为50 μm,光纤探针B 的光场覆盖长度以及与光纤端口的距离远远大于光纤探针A,所以光纤探针B 对同样大小微粒的可控操纵距离大于光纤探针A 的操纵距离。结合实验结果和以上仿真分析,本文设计的类锥形平口光纤可以对微粒进行长距离可控操控,通过调整光纤探头端口的尺寸可以调整操纵距离。
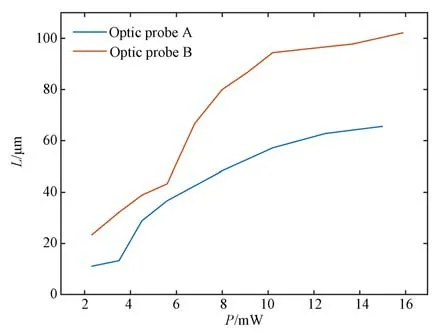
图7 粒子可控距离与光源输出功率的关系Fig.7 Relationship between controllable distance of particles and output power of light source
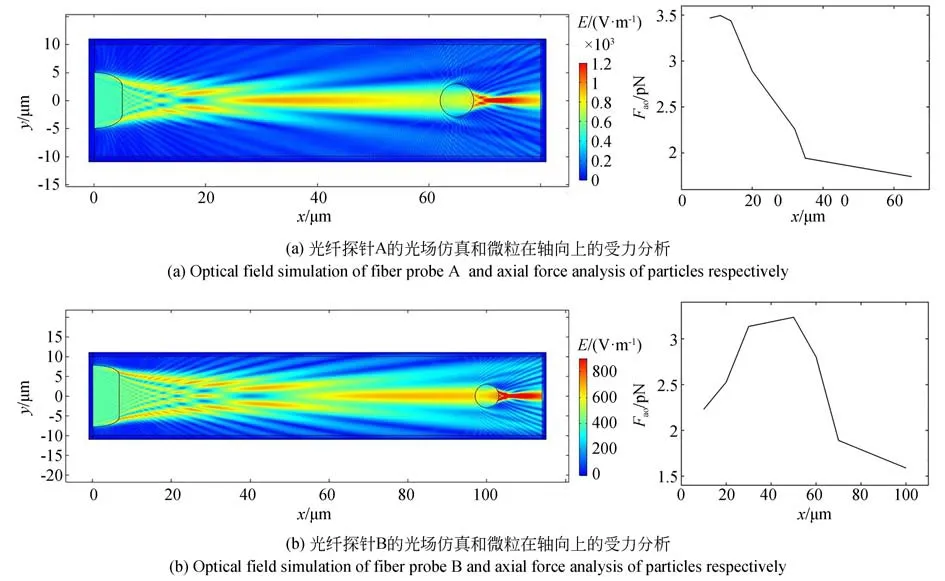
图8 两种光纤的仿真对比Fig.8 Simulation comparison of two optical fibers
4 结 论
为了解决光纤光镊捕获细胞或粒子距离短的问题,提出了一种结构简单且具有长距离非接触可控操纵微粒的方法。该方法利用特殊的类锥形平口光纤探头对微粒产生大的散射力,同时与设计的简易流体阻力装置结合在一起,制作了两种不同尺寸端口的类锥形平口光纤并进行对比实验。其中,光纤探头A 对微粒的最大操纵距离约为65.6 μm,而在相同光源功率下,光纤探头B对同样大小聚苯乙烯微粒的最大操纵距离可以达到102.2 μm。为了验证实验结果的合理性,本文分别采用有限元法和麦克斯韦应力张量法仿真分析了类锥形平口光纤光镊的光场强度分布以及对微粒的受力情况。仿真结果和实验两方面都验证了所提出类锥形平口光纤光镊实现长距离操纵微粒的可行性。在生物和医学领域,该方法对于生物样品的灵活操控、靶向给药和生物化学物质的协同观察等具有重要意义。由于本实验设计的流体阻力装置目前只能控制粒子的流向,未来将该方法与微流控芯片结合,那么在降低流速的情况下,微粒的可控操纵距离会进一步提高。
猜你喜欢
中华环境(2021年9期)2021-10-14 07:51:06
中华环境(2021年8期)2021-10-13 07:28:34
环境卫生工程(2021年4期)2021-10-13 06:52:26
中华环境(2021年7期)2021-08-14 01:57:26
昆明医科大学学报(2021年1期)2021-02-07 01:06:48
疯狂英语·新悦读(2017年6期)2017-06-24 13:52:05
中华老年口腔医学杂志(2016年5期)2016-03-01 02:24:22
中国继续医学教育(2015年5期)2016-01-07 07:38:17
天津大学学报(自然科学与工程技术版)(2015年10期)2015-12-29 12:53:20
中国塑料(2015年9期)2015-10-14 01:12:30