行走助力型下肢外骨骼机器人的设计与控制
2022-08-02 08:52曾城,许森,丁烨
机械与电子 2022年7期
曾 城,许 森,丁 烨
(上海交通大学机械与动力工程学院,上海 200240)
0 引言
近年来,下肢助力外骨骼机器人在国内外都是一个研究热点,与康复外骨骼机器人不同,其更关注对正常人的肢体力量进行提升,通过同步跟随穿戴者的运动,帮助穿戴者承担更大的负载,辅助其进行各种运动并减少体力消耗,主要应用于各种大强度体力活动的场合。
目前,国外研究机构已经研发出多种外骨骼样机,如美国加州大学伯克利分校研制的BLEEX[1-2],其采用的是灵敏度放大控制和位置控制相结合的混合控制策略;日本筑波大学研制的助力外骨骼HAL系列[3-5],其通过皮肤表面肌电信号获得穿戴者的运动意图,对外骨骼进行实时的控制;新加坡南洋理工大学则基于零力矩点(ZMP)平衡理论研制了下肢助力外骨骼NTULEE[6-7];美国哈佛大学还开发了一款柔性外骨骼短裤[8],开发出Human-in-the-loop助力轨迹优化方法,降低穿戴设备行走的代谢消耗。
国内学者也从多方面研究了助力式下肢外骨骼。浙江大学的杨灿军教授课题组研制了一款增强穿戴者步行能力的气动下肢外骨骼[9],使用自适应神经网络模糊推理控制算法来实现对主动关节的控制;哈尔滨工业大学的赵杰教授课题组研制了一款主被动结合式全身外骨骼助力机器人[10],其利用足底压力信号得到人体下肢的运动状态,再采用直接力控和灵敏度放大控制相结合的控制方式,对下肢外骨骼进行力闭环控制;北京大学的王启宁教授课题组则针对柔性的膝关节外骨骼进行研究,首次提出一种基于连续体结构的新型柔性膝关节外骨骼[11]。
针对负重助行需求,柔性结构的外骨骼无法将负载传递至地面;刚性结构固然可以传递载荷,却存在着无法与穿戴者严格匹配,穿戴舒适性和安全性无法保证等问题。本文以行走助力为主要目标,考虑穿戴适配性与舒适性等因素,设计了一个模块化的下肢助力外骨骼,并基于该机器人系统实现了主动助力和随动跟踪2种控制模式。
1 行走助力型下肢外骨骼机构设计
1.1 人体下肢结构特征

图1 人体下肢结构特征
一般把人体单边的下肢近似为一个7自由度的多刚体串联机构,如图1b所示,髋关节连接着躯干与大腿,有外展/内收、内旋/外旋与伸展/弯曲3个自由度,膝关节连接着大腿与小腿,只有伸展/弯曲1个自由度,小腿与足则由踝关节连接,足部可以实现内旋/外旋、外展/内收与伸展/弯曲3个自由度。如表 1所示展示了下肢各关节的极限运动角度,对应的初始姿态为正常站立位姿。

表1 下肢各关节运动的极限角度[12]
1.2 下肢外骨骼构型设计
下肢外骨骼的设计,除了需要考虑人体下肢的结构与运动参数,同时也应该符合穿戴轻便与减少能耗的要求。本文主要讨论穿戴下肢外骨骼机器人步行的场景,在该场景下下肢各关节的运动不会达到极限角度,同时具有一定的周期性,是常见的下肢外骨骼应用场景。
如上所述,单边下肢有7个自由度,如果直接实现7自由度全驱动,不仅会使机械系统变得冗杂,还会因为安装过多在行走中少做功的驱动器而增加系统的重量,进而增加穿戴者的负担,与助力的需求相悖。为了简化机构设计,采用与下肢部分异构,整体同构的设计方法。人在行走时,下肢的主要运动发生髋、膝、踝3个关节绕矢状面法向的转动上,即这3个关节的伸展和弯曲。研究表明,踝关节在平地行走过程中平均功率几乎为0[13],且在踝关节处设置驱动会增加外骨骼系统的惯量,而下肢绕其他参考面法向的转动幅度较小,故本文仅将髋、膝关节绕矢状面的转动设为驱动自由度。为了兼顾穿戴的舒适性,本文将剩余的自由度均设计为被动自动度,并取消了踝关节的外旋/内旋自由度,外骨骼系统的构型如图 2a所示。

图2 下肢外骨骼机械系统
系统结构设计还需考虑其适配性、舒适性与安全性。本文在下肢外骨骼的设计上引入尺寸调节机构,同时也在人机交互处引入了一定的柔性以保证穿戴的舒适性。
2 行走助力型下肢外骨骼系统具体实现
2.1 机械系统的具体实现
根据上述设计方案,下肢外骨骼的机械系统如图 2b所示。连杆受力大,采用强度高、密度低的T6061铝合金材料加工而成。考虑到接触柔性、减重等需求,足底、人机接触面和电机座等部件使用更轻、更软的树脂3D打印加工。
研究表明,70 kg的成年人以0.9 m/s的速度步行时,髋关节的最大角速度约为3.4 rad/s,最大关节力矩约为35 N·m;膝关节的最大角速度约为5.6 rad/s,最大关节力矩为21 N·m。综合考虑驱动的功重比和人正常行走时关节速度和力矩的变化范围,本文选择无刷电机-谐波减速器模组作为驱动方案,4个主动自由度的驱动均采用Maxon公司生产的直流无刷盘式电机EC flat 90与绿的谐波公司生产的谐波减速器LHD-20-50-C-I。谐波减速器采用柔轮固定,刚轮输出的安装方式,分别通过特制的法兰、轴连接器与电机的本体、转轴紧固连接,形成驱动模块后用于关节的驱动,可以提供约37 N·m的转矩,且输出端的额定转速为5.2 rad/s,可以满足助力的需求。装配后1个关节模组的总质量为1.3 kg,总厚度为58.7 mm,结构紧凑,不会与上肢运动或者环境发生明显的干涉。
由于人在行走运动过程中,躯干的摆动幅度最小,需使机器人系统的质心尽量向躯干集中,因此主控上位机与电源等电气设备均布置在躯干处凸出平台。为了降低摆动腿的转动惯量,本文将膝关节的驱动模块偏置在大腿连杆上,并引入局部平行四边形机构驱动膝关节。
为适应不同体型大小的穿戴者,该外骨骼机器人在躯干背板处、大腿杆件处和小腿杆件处均设有尺寸调节机构,可以分别调整到合适的尺寸后使用螺栓在对应通孔处进行固定,实现各处尺寸的离散调节。对比人体各部位尺寸数据[16],该外骨骼系统可适用于髋部宽度在300~408 mm范围内,大腿长度在490~550 mm范围内,小腿长度在370~430 mm范围内的穿戴者。此外,外骨骼躯干处设有背带以便穿戴者背负,且穿戴者的胸腹部、大腿中部、小腿中部及足部均设有弹性绑带用于绑缚固定,这些设计增加了穿戴舒适性的同时也保证了人机运动的一致性。
总而言之,现代信息化为体育教学提供了有利平台,促进了教育的个性化发展。高校体育作为国家体育各项工作展开与实施的改革前沿阵地,有着举足轻重的地位。在发展体育建设的道路中,肯定会出现一些问题,所以在现代教学信息化的背景下,学校应提高对体育教学多方面的认识,建立健全的信息化资源设施,合理创新信息化体育课堂,重视师生信息化能力培养,从整体上促进高校体育的全面发展。
为了确保在主动驱动关节控制异常时穿戴者的人身安全,本文还在主动驱动关节上设计了机械限位结构。主动关节的运动在机械结构和软件控制的共同限制下,可以维持在人体下肢关节正常的运动范围内,具体数值如表 2所示。其余被动自由度由穿戴者本人利用自身的平衡能力调节控制即可,所以未被限制运动范围。

表2 主动关节不同层次的极限运动角度
此外,为了兼容多种驱动(如柔性、变刚度驱动器),方便替换杆件,以便样机的迭代与优化本文采用模块化的设计方法,将下肢外骨骼分为躯干、髋关节、大腿、膝关节、小腿、踝关节与足部共7种模块,并为各模块设计了结构简单、强度良好的泛用接口。
2.2 电气系统实现
如图 3所示为该外骨骼电气系统的主要结构。惯性测量单元(IMU)模组由5个维特智能生产的WT901C485组成,通过Modbus与上位机通信。传感器分别固定在穿戴者的胯部,左右大、小腿中部,用于读取穿戴者的运动信息,并通过单片机将信息反馈给上位机。运动控制器(maxon, EPOS4定位控制器)通过CAN总线与上位机通信,实时接收上位机的指令控制电机运动,并上传实时测量的电机状态。
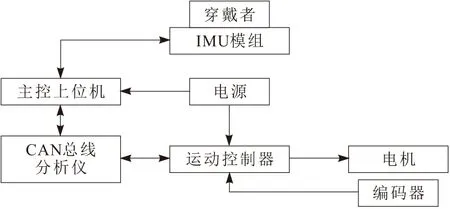
图3 下肢外骨骼机器人电气系统构成
3 基于运动学方法的驱动关节角解算

(1)
(2)
4 下肢外骨骼机器人控制模式
本文的下肢外骨骼机器人控制模式主要分为随动跟踪模式与主动助力模式2种,如图 4所示。其中,θd为目标关节角;θr为实际关节角;Id为目标电流;Ir为实际电流。2种控制模式的区别主要在于实时目标关节角的获取方式的不同,而其底层均为经典的PID控制方法。
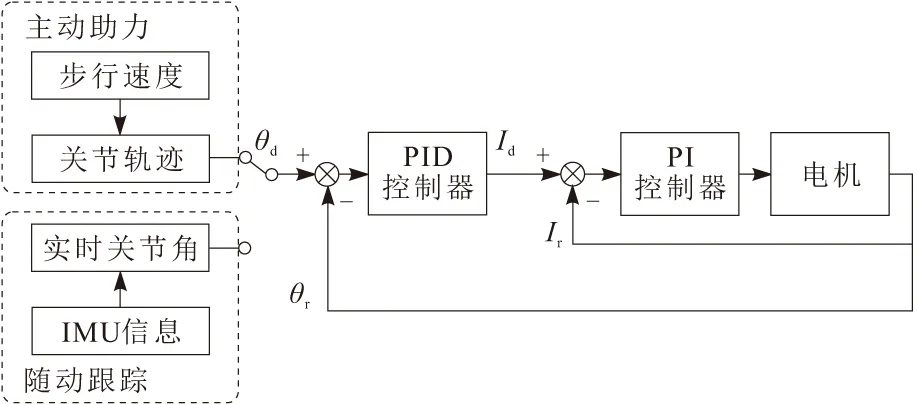
图4 下肢外骨骼机器人控制模式
4.1 主动助力模式
在主动助力模式下,外骨骼主动关节的目标轨迹由上位机实时生成,穿戴者只需要跟随外骨骼进行运动。该模式适用于穿戴外骨骼机器人进行长时间规律行走的场景。
该模式下关节目标轨迹的生成与步行速度相关性强。在行走步态下,关节的运动具有周期性,1个步态周期从关节所在腿的脚掌触地时开始,在腿经历支撑与摆动2个阶段后,再次触地时结束。以左膝关节为例,1个步态周期中关节的轨迹变化大致如图5所示。

图5 左膝关节1个步态周期内的轨迹
从该曲线中可以提取出轨迹的起点A,3个曲线极值点B、C、D和轨迹终点E共5个特征点。根据不同步行速度下的人体关节数据,可以对步态周期T以及各极值点处的关节角度和其在步态周期中所处的相位进行拟合与分析,得到其对应关系。如图6所示分别为不同步行速度下对特征点B关节角度和步态周期的拟合结果,可知关节角度、步频与步行速度可以用线性关系近似。
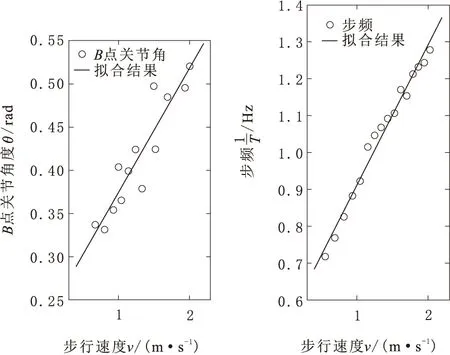
图6 不同步速下极值点B和步频的拟合
对其他的特征进行类似的操作,最终可得左膝关节轨迹中各极值点及步态周期与步行速度的拟合关系如式(3)所示,其中,v为步行速度;θα,α∈{A,B,C,D,E}为各极值点处的关节角度;T为1个步态周期的时长;tα,α∈{A,B,C,D,E}为从步态开始至各极值点处所经历的时间。在此基础上,根据得到的轨迹极值点及步态周期,使用Hermite插值的方法,可以规划得到膝关节轨迹曲线,如图 7所示即根据不同步行速度所生成的膝关节轨迹。而髋关节的轨迹也可以用同样的方法来生成。

图7 不同步速下生成的膝关节轨迹
(3)
4.2 随动跟踪模式
在主动控制模式下,外骨骼主动关节的目标轨迹来自于穿戴者的下肢姿态信息。该模式下,主控上位机读取绑缚于穿戴者躯干及腿上的IMU的信息,根据式(2)解算出人体的关节角,并将该关节角作为目标角度控制外骨骼关节运动。体现为外骨骼跟随穿戴者的运动。该模式适用于穿戴外骨骼进行不规律行走的场景,如地形切换。
5 下肢外骨骼机器人样机实验探究
5.1 下肢外骨骼机器人样机搭建
如图 8所示,在主动关节未驱动的情况下,由于多个被动自由度的存在,穿戴者在这些方向上的运动不会被限制,搭建的下肢外骨骼机器人样机可与穿戴者较为紧密地贴合。外骨骼的刚性结构使得其负载大部分由支撑腿传递至地面,穿戴者只需提供使其保持稳定的力,而不需承担外骨骼带来的额外负载。

图8 下肢外骨骼机器人样机穿戴示意
5.2 主动助力实验
在该实验过程中,受试者穿戴下肢外骨骼,在外骨骼预定轨迹的“牵引”下向前行走。对比穿戴者与外骨骼的关节轨迹可以评估助力效果。图 9为被动模式下穿戴者与外骨骼的左膝关节轨迹,其中涉及步行速度的1次切换,即平均步行速度从0.5 m/s切换到1.0 m/s。

图9 被动模式下穿戴者与外骨骼的膝关节轨迹
从实验结果可见虽然二者运动周期相同,但穿戴者的膝关节运动幅值显著低于外骨骼对应关节的运动幅值。这是因为此时穿戴者被动运动,而人机之间依靠弹性绑带交互,外骨骼对穿戴者的助力体现为绑带的弹力,自然外骨骼与穿戴者对应的关节会有一定的偏置,而这个偏置与所需的拉力大小相关。
5.3 随动跟踪实验
随动跟踪模式实验的内容是由受试者穿戴下肢外骨骼进行长时间的行走活动,获取实时信息以评估实验效果。图 10和图 11为受试者穿戴设备从站立到行走到停步的完整过程中右侧下肢2个主动关节的跟踪情况,可见下肢外骨骼的跟随效果很好,而关节角速度越大,跟踪误差则越大。

图10 主动模式下穿戴者与外骨骼的右髋关节轨迹
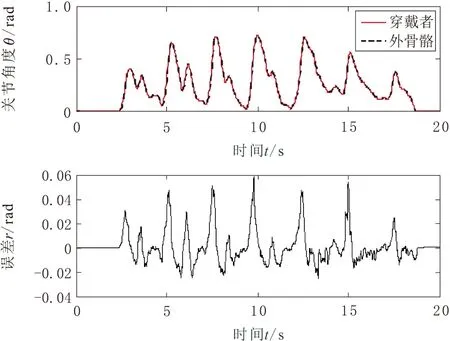
图11 主动模式下穿戴者与外骨骼的右膝关节轨迹
实验过程中下肢各个关节的平均绝对误差如表3所示。

表3 主动关节不同层次的极限运动角度
6 结束语
本文以开发的下肢外骨骼机器人为研究对象,从人体下肢结构特征与工程需求出发,进行机器人系统的设计,并搭建了下肢外骨骼样机。在此基础上,实现了2种模式的运动控制,分别适用于长时间规律步行场景与短时不规律步行场景。在行走实验中发现:
a.受通信方式影响,外骨骼的跟踪仍有滞后。
b.目前的模式只能实现外骨骼不阻碍穿戴者的正常运动,承担一定负载,还不能对人的下肢起到助力作用。
这些问题是接下来值得研究的主题。此外,由于膝关节本质上并非单轴旋转关节,后续工作可以无需考虑驱动模块而直接对膝关节进行替换,这也体现了本文模块化设计的优点。
猜你喜欢
英语世界(2022年9期)2022-10-18
现代仪器与医疗(2022年4期)2022-10-08
数学大王·中高年级(2022年5期)2022-05-22
今日农业(2021年4期)2021-06-09
小哥白尼(野生动物)(2021年12期)2021-03-29
金桥(2020年9期)2020-10-27
中学生数理化(高中版.高考理化)(2020年3期)2020-05-30
轻兵器(2019年5期)2019-06-21
商周刊(2017年17期)2017-09-08
大众健康(2016年3期)2016-05-31