
一种靶弹机动飞行控制装置的设计*
2022-08-02 02:18:14刘基睿付京来
舰船电子工程 2022年6期
王 刚 刘基睿 付京来
(91851部队 葫芦岛 125001)
1 引言
靶弹用于模拟敌方来袭的导弹,是考核鉴定防空武器防空反导能力的重要靶标[1~2]。利用退役的飞航式反舰导弹改装靶弹即节约了导弹退役报废费用,又节约了防空导弹用靶费用,是一种经济而有效的靶标开发模式[3~4]。某型靶弹由退役的飞航式反舰导弹改装而成,该靶弹采用以控制组合为计算核心、以陀螺和高度表为测量器件、以舵机为执行机构的自动驾驶仪来控制靶弹稳定平飞。控制组合是一台由模拟电路构建的模拟计算机,用于完成靶弹飞行高度以及俯仰、航向、倾斜三个姿态角控制通道的控制规律计算,使靶弹的飞行高度、俯仰角、航向角、倾斜角通道形成稳定回路,从而使靶弹的姿态角保持稳定并按预定高度飞行[5]。该靶弹弹道形态单一,不能模拟敌方导弹的机动突防功能,而在防空武器试验训练中,抗击具有末端机动变轨能力的靶弹,对于检验防空武器的真实作战性能具有非常重要的意义[6~7]。防空武器试验与评价的可信度,在很大程度上取决于靶弹模拟威胁目标的逼真程度[8~9]。防空武器的战斗力生成能力直接取决于靶弹技术的发展水平[10~11]。为使该靶弹具有机动飞行能力,提升该靶弹目标模拟的逼真度与技术水平,针对该型靶弹控制组合的特点,本文设计了一种靶弹机动飞行控制装置,该机动飞行控制装置在靶弹上安装使用后可以使靶弹具备水平机动飞行和垂直机动飞行的能力。
2 机动飞行控制装置总体设计
靶弹机动飞行控制装置需要对靶弹驾驶仪的航向通道和高度通道进行控制。靶弹驾驶仪航向和高度通道是典型的PID 控制过程,安装机动飞行控制装置后,靶弹航向和高度通道的控制原理如图1、2 所示。图1 是航向通道控制原理框图,该通道以航向陀螺输出的航向角为测量信号,航向通道中的航向综合放大器完成对航向角比例、积分、微分信号求和,而后输出给航向舵机,对靶弹航向进行控制。航向通道中航向基准电路用于该靶弹原型弹的雷达制导控制,改装为靶弹后,该部分电路在射前检查时用于控制航向舵偏转,靶弹飞行时该部分电路不再起作用[12]。加装机动飞行控制装置后,继电器K1 可以切断航向基准信号,机动飞行控制装置通过K1 的常开点输出航向控制信号,进而控制靶弹的航向,使靶弹具备水平机动飞行的能力。图2 是驾驶仪高度通道控制原理框图。该通道以高度表高度和俯仰陀螺的俯仰角为测量信号,将俯仰角的比例和微分环节,以及高度表信号的比例、积分和微分环节进行求和构成控制量,使靶弹保持一定的攻角并按预定的高度程序稳定平飞[13]。机动飞行控制装置对靶弹飞行高度进行控制时,K2继电器动作,K2-1、K2-2 常开点闭合,高度通道的高度差、垂直速度、高度积分信号断开,控制器根据高度表高度测量值计算高度差、垂直速度、高度积分前级信号,并通过K2 继电器的常开点输出至高度通道,从而控制靶弹的平飞高度并完成垂直机动飞行。机动飞行控制装置通过K1、K2 继电器实现对航向和高度控制通道控制功能的切换,K1、K2继电器安装在机动飞行控制装置内部。
3 机动飞行控制装置硬件设计
机动飞行控制装置由计算机模块、信号调理模块、壳体和专用电缆构成。计算机模块和信号调理模块安装在壳体内,壳体通过专用电缆连接到靶弹控制组合,对控制组合进行控制。专用电缆将靶弹的零点启动指令、航向战斗指令和高度战斗指令,高度表信号和信号地线,靶弹控制组合中的航向基准信号1、航向基准信号2、高度差信号1、高度差信号2、垂直速度信1、垂直速度信号2 引入到机动飞行控制装置。机动飞行控制装置硬件原理框图如图3所示。
计算机模块由中央处理器(CPU)、模拟量采样电路、模拟量输出电路,开关量采样电路、开关量输出电路及串口通信电路构成。计算机模块的CPU用于装订靶弹的飞行任务参数、运行飞行控制程序。靶弹飞行任务参数包括靶弹水平机动和垂直机动飞行的开始时间及机动周期个数。靶弹飞行任务参数装订后,CPU能根据任务参数生成靶弹机动飞行的理论弹道,运行飞行控制程序控制靶弹按照理论弹道飞行。

图1 靶弹航向通道控制原理框图
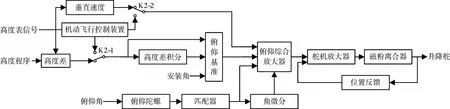
图2 靶弹高度通道控制原理框图
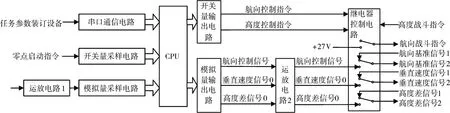
图3 机动飞行控制装置硬件原理框图
信号调理模块包括电源模块、运放电路1、运放电路2、继电器控制电路;电源模块为信号调理模块运算放大器和计算机模块提供稳压电源。运放电路1 将靶弹控制组合的高度表信号的电压调整到计算机模块模拟量采样电路能够采样的范围内,供计算机模块采样;运放电路2 将计算机模块模拟量输出电路输出的航向控制信号、高度差信号0和垂直速度信号0电压值进行比例放大。继电器控制电路分别受计算机模块开关量输出电路输出的航向控制指令、高度控制指令和原靶弹输出的高度战斗指令控制。信号调理模块电路图如图4 所示。
机动飞行控制装置工作过程如下:零点启动指令作为靶弹发射零点信号供计算机模块开关量采样电路采样,采样值送给CPU。当计算机模块CPU采到零点启动指令有效的信号后即开始对靶弹驾驶仪进行飞行控制。
对靶弹航向进行控制时,计算机模块CPU通过模拟量输出电路输出航向控制信号给运算放大电路2,运放电路2 将航向控制信号的电压值放大后输出给继电器控制电路,同时CPU通过开关量输出电路输出航向控制指令给继电器控制电路。继电器控制电路接收到航向控制指令后,发出+27V 的航向战斗指令给靶弹控制组合,同时将控制组合中的航向基准信号1 与航向基准信号2 断开,航向控制信号与航向基准信号2 相连,使机动飞行控制装置通过输出航向控制信号和航向战斗指令控制靶弹在航向上按理论弹道飞行。
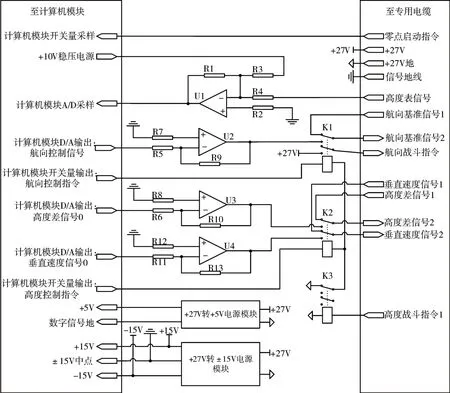
图4 信号调理模块电路图
对靶弹高度进行控制时,信号调理模块运放电路1 将高度表信号的电压调整到计算机模块模拟量采样电路能够采样的范围内,模拟量采样电路将高度表信号采样值送给CPU。CPU 将高度表信号采样值与理论弹道高度进行求差计算得出高度差信号0,将高度表信号采样值进行微分计算得出垂直速度信号0。
CPU 通过模拟量输出电路将计算得出的高度差信号0和垂直速度信号0输出给信号调理模块运放电路2,运放电路2 将高度差信号0 和垂直速度信号0 的电压值放大后输出给继电器控制电路,同时CPU 通过开关量输出电路输出高度控制指令给继电器控制电路。继电器控制电路在接收到高度控制指令时将控制组合中的高度差信号1 与高度差信号2,垂直速度信号1 与垂直速度信号2 断开,将运放电路2输出的高度差信号0与控制组合高度差信号2 相连,将运放电路2 输出的垂直速度信号0 与控制组合垂直速度信号2 相连,使机动飞行控制装置通过输出高度差信号0和垂直速度信号0给靶弹控制组合,从而控制靶弹按理论弹道高度飞行。
4 机动飞行控制模型仿真
4.1 水平机动
机动飞行控制装置可以控制靶弹完成1个或2个周期的水平机动飞行。靶弹水平机动飞行时,机动飞行控制装置以开环控制的方式向靶弹驾驶仪输出航向控制信号来控制靶弹航向转弯,航向控制信号是一个增加了惯性环节的矩形波信号,航向控制信号φm的幅值和持续时间如图5 所示。机动飞行控制装置输出的航向控制信号将使靶弹按周期调整飞行方向,从而形成一条近似正弦波形状的弹道曲线。机动飞行控制装置输出航向控制信号的同时发出航向控制指令,该指令使驾驶仪航向积分通路断开,转换为保持状态,即航向积分电路停止积分,保持不变。航向积分环节用于消除静态误差,当靶弹航向角不为零时,航向积分环节对航向角进行积分,航向积分将使弹体航向角趋向于零。因此靶弹水平机动飞行时,若不断开航向积分环节,靶弹将无法完成航向机动飞行。机动飞行控制装置进行水平机动控制时,用传递函数为的惯性环节对幅值为±44°的方波信号进行平滑得到航向控制信号φm,该惯性环节可以有效降低靶弹瞬间过载,减小弹体抖动。 在进行航行机动控制时,控制器发出航向控制指令,该指令切断航向积分通路;同时控制器输出航向控制信号,航向控制信号与比例环节、微分环节求和后输出给舵机,进而控制靶弹偏转。图5 为靶弹水平机动航向控制信号和弹道仿真曲线,从图中可见靶弹完成两个周期的水平机动飞行。
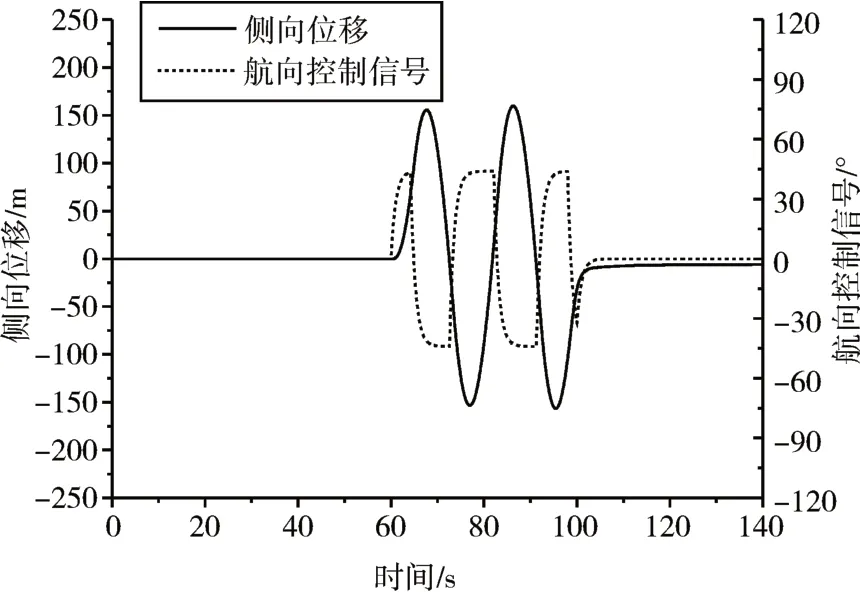
图5 两个水平机动弹道仿真曲线
4.2 垂直机动
机动飞行控制装置可以控制靶弹在垂直方向上进行一个或两个周期机动飞行。选择机动飞行时,靶弹平飞高度必须大于100m。该限制条件可以避免靶弹平飞高度过低情况下进行垂直机动而使靶弹入水。垂直机动飞行的弹道形状类似正弦波。控制靶弹进行垂直机动飞行,可以在高度程序上叠加一个幅值为±200m 的方波,即可以形成能够控制靶弹垂直机动的控制程序。进行垂直机动飞行时,机动飞行控制装置同时对高度表测高信号求微分,而后将高度差信号和高度微分信号输出给高度控制通道中的后一级。图6 是靶弹在100m 平飞条件下两个垂直机动周期飞行时靶弹的高度程序和仿真弹道,从图中可见,靶弹完成了两个周期的垂直机动飞行。
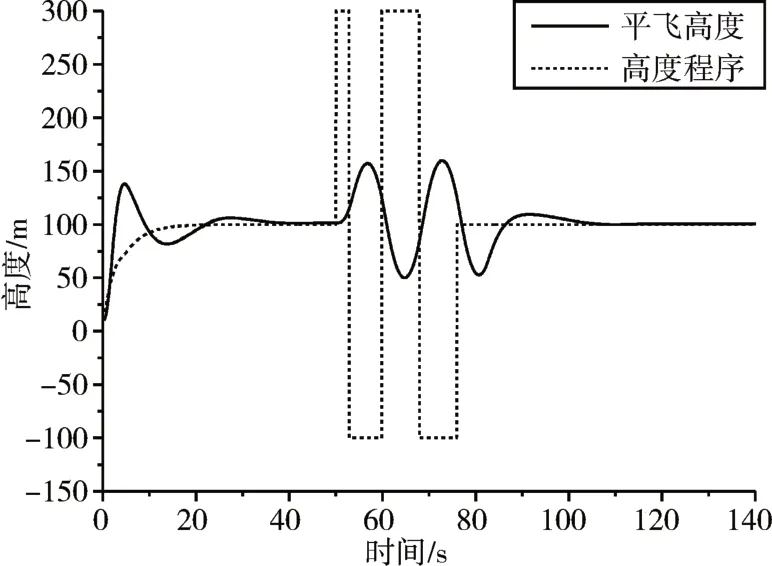
图6 两个垂直机动弹道仿真曲线
5 结语
针对某型靶弹自动驾驶仪的电气特性和控制规律特点,本文设计一型靶弹机动飞行控制装置,该装置可以在该型靶弹上直接安装使用,使靶弹具备水平机动飞行和垂直机动飞行的能力。最后用靶弹飞控模型仿真程序对靶弹水平和垂直机动飞行弹道进行仿真,经仿真,靶弹机动飞行弹道达到了设计效果。
猜你喜欢
弹箭与制导学报(2023年4期)2023-09-15 01:20:50
弹箭与制导学报(2023年1期)2023-04-20 05:56:10
新世纪智能(高一语文)(2021年3期)2021-07-16 08:30:16
民用飞机设计与研究(2019年4期)2019-05-21 07:21:26
舰船电子工程(2018年12期)2019-01-03 07:36:24
环球时报(2018-10-23)2018-10-23 04:22:24
学生导报·初中版(2017年19期)2017-08-13 08:25:30
北京航空航天大学学报(2017年12期)2017-04-23 08:31:50
电子制作(2017年24期)2017-02-02 07:14:16
制导与引信(2016年3期)2016-03-20 16:01:59
