
星凸形随机超曲面粒子扩展目标跟踪滤波器*
2022-08-02 02:13:28李永永
舰船电子工程 2022年6期
李永永 王 莉
(兰州理工大学电气工程与信息工程学院 兰州 730050)
1 引言
传统的跟踪滤波算法通常假设传感器接收到的量测来自一个没有空间范围的点目标。然而,随着电子技术和传感器分辨率的不断提高,在实际的目标跟踪系统中,该假设并不适用。例如,现代高分辨率雷达设备可以接收来自目标不同散射中心的多个量测,这些量测既包含运动学信息,也隐含有目标形状信息,称这样的目标为扩展目标(Extended Target,ET)[1~2]。对于 扩 展 目 标跟 踪(ET Tracking,ETT)问题,传统的点目标跟踪滤波算法并不适用,且每一个量测在目标表面的产生是随机的,甚至仅有一些量测对于目标状态的估计是有效的。因此,需要更为复杂和科学的建模形式对量测源进行建模去估计目标的形状信息。
扩展目标跟踪一直是目标跟踪领域的研究热点,而对于扩展目标的形状轮廓特征进行递推估计是ETT研究中的核心问题。近些年来,一些经典的量测源建模方法被先后提出。例如随机矩阵模型(Random Matrix Modeling,RMM)[3~4]、高斯过程回归(Gaussian Process Regression,GPR)[5]、随机超曲面模型(Random Hypersurface Modeling,RHM)[6]等方法,对于不同方法的具体应用,其形状建模要对应不同的分布假设。RMM 假设目标的形状可用一个椭圆来参数化表示,用高斯逆Wishart 分布表示扩展目标的形状信息,这种方法可有效估计目标的椭圆基本轮廓特征,并具有形状的大小和方向特征,但不能有效提取目标的局部不规则轮廓特征。GPR方法是用高斯过程回归自适应目标形状,从而可以表示出任意形状的外形轮廓,这种方法的缺点在于计算量大,且实现相对困难。RHM 用径向函数来描述目标形状,通过对径向函数傅里叶级数展开参数化表示,以及目标轮廓边界的缩放来对目标量测源建模,从而估计不规则目标形状。这种方法相较于上述两种方法计算量小易于实现,且能估计任意不规则形状,已被有效应用于扩展目标跟踪中[7~8]。
一般情况下,扩展目标跟踪可被描述为一个非线性估计问题,其中目标状态向量包含目标的运动学信息和形状信息,可利用递推贝叶斯滤波[9]来求解估计问题。然而,RHM 对应了一个高度非线性的量测方程,这加剧了基于RHM 跟踪扩展目标问题的求解难度,因粒子滤波(Particle Filtering,PF)[10~13]技术在非线性非高斯系统表现出其强大的优越性,PF 的多模态处理能力以及对系统的要求相对最低决定了它非常广泛的适用范围。它的本质是利用序贯重要性采样抽样一簇加权粒子来近似表示状态向量的概率分布,通过加权粒子群迭代更新实现递归贝叶斯估计。本文正是利用PF的适用性和有效性,研究基于RHM 扩展目标跟踪算法的具体实现来解决该非线性问题。
针对不规则形状的扩展目标跟踪问题,本文利用星凸形(Star-convex shape)随机超曲面模型对扩展目标量测源进行建模,建立了扩展目标的量测方程,并将其转换为伪量测方程的形式,从而有效建模目标量测和形状之间的对应关系。进一步利用PF 进行非线性非高斯滤波,通过详细的分析推导,提出了星凸形随机超曲面模型扩展目标粒子滤波算法,实现了对扩展目标运动参数和不规则形状的联合估计。最后,通过实验仿真验证了该方法的有效性和正确性。
2 星凸形扩展目标随机超曲面建模
针对星凸形扩展目标,本文选用随机超曲面模型建模,RHM 是一种对扩展目标量测源的建模方式。该模型假设目标量测源的位置随机分布在目标表面,用径向函数来描述目标的轮廓,通过对目标边界缩放,在缩放后的随机超曲面上产生一个元素作为量测源。径向函数是目标质心到边界之间的距离关于角度的函数,将径向函数傅里叶级数展开后,目标形状就可以参数化表示。具体建模方式如下。
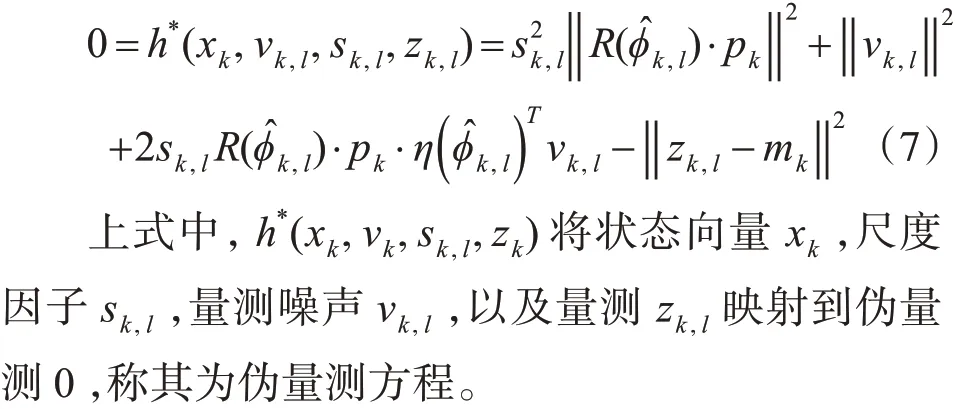
通常情况下,量测源与坐标轴之间的夹角无法直接获得,故用k 时刻目标质心位置的点估计值和量测zk,l之间的向量与x 轴的夹角近似代替位置角度ϕk,l。对于式(6)所示得量测方程,与以往传统滤波算法中量测方程不同,该量测方程并没有状态与量测的直接关系,且为减小角度近似后的影响,将其改写为如下量测方程:
3 星凸形RHM 粒子扩展目标跟踪滤波器
3.1 星凸形RHM粒子扩展目标跟踪滤波算法
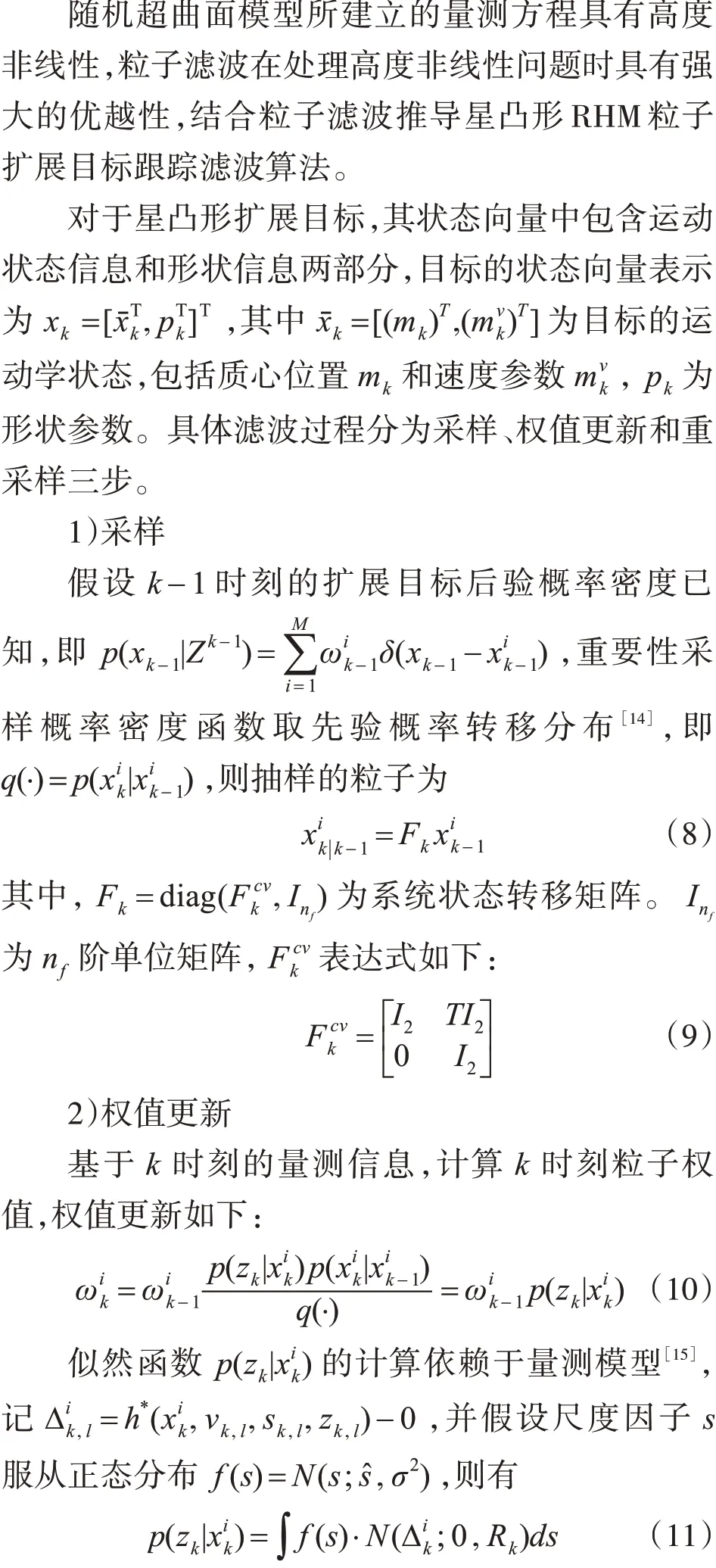
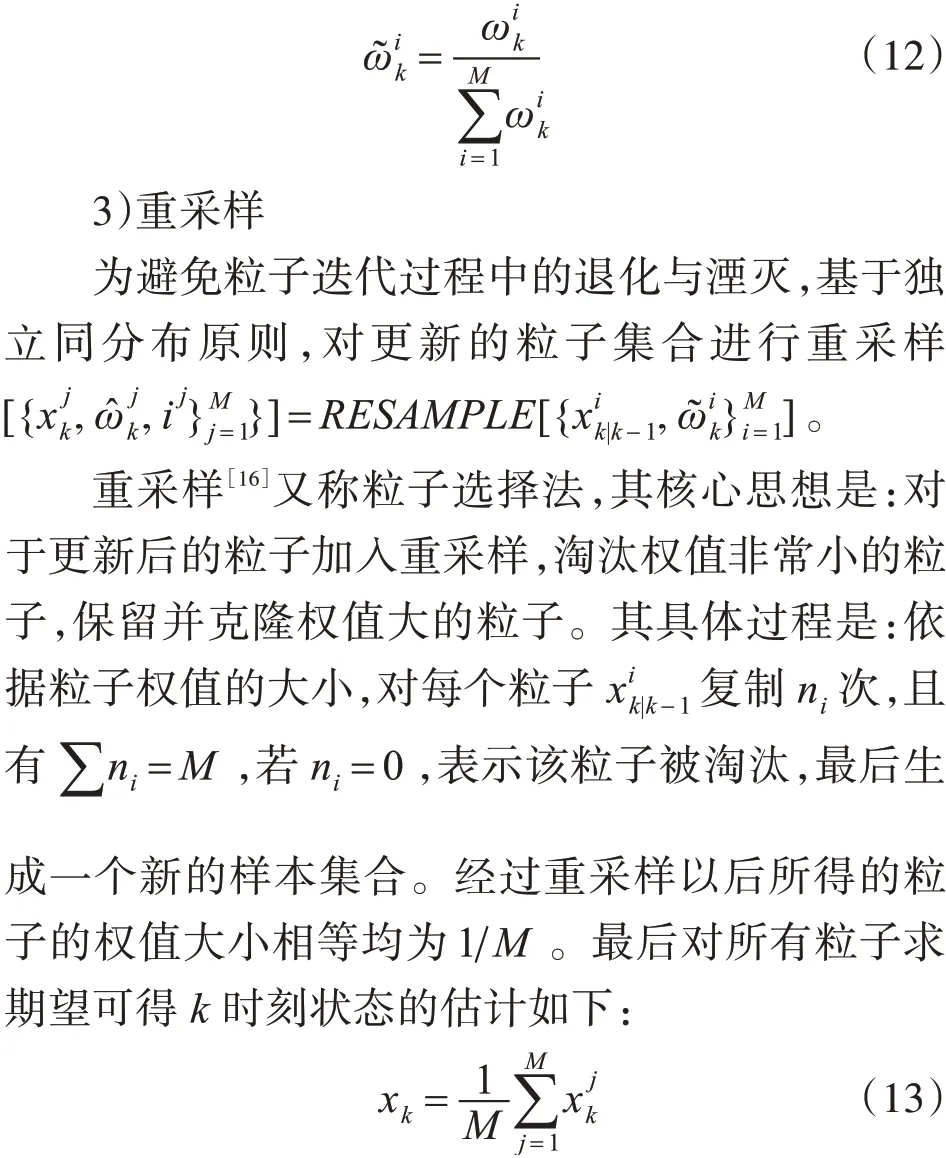
粒子权值更新以后,对权值进行归一化处理,使权值总和为1,即
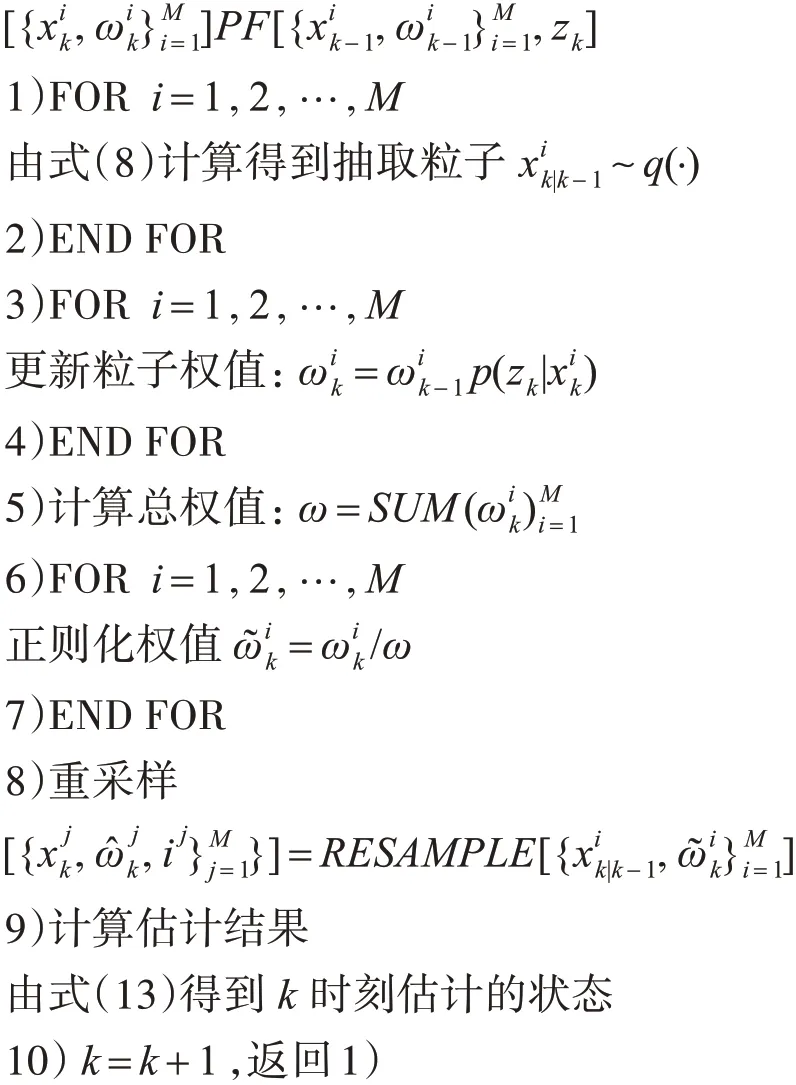
3.2 伪代码
4 仿真分析
为评价该滤波算法对扩展目标的跟踪估计性能,本文以拟Jaccard 距离[17]作为不规则形状扩展目标估计的评价指标。
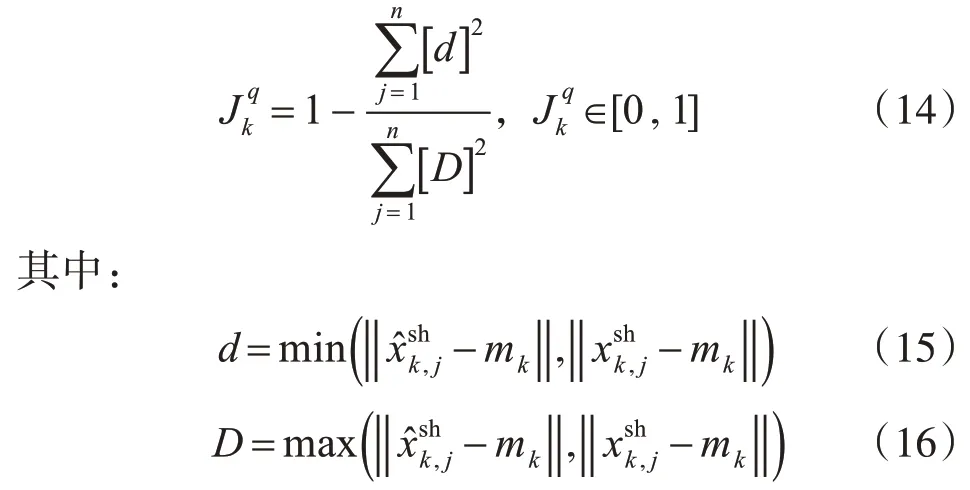
由拟Jaccard 距离计算公式可看出,Jkq的值越小,对目标外形轮廓的估计越精确。
构造扩展目标和群目标[18]在空间中的运动场景,用本文提出的星凸形随机超曲面粒子扩展目标滤波器实现对目标的跟踪,验证该算法的有效性和正确性。假设两种目标在空间中做匀速运动,传感器采样间隔周期T=1,量测源分布在目标表面,径向函数傅里叶展开项个数nf=11 ,过程噪声
场景一:
设置目标为十字形扩展目标,每一时刻传感器接收的量测数由均值为30 的泊松分布产生,量测噪声期望为0,方差R=diag([0.02,0.02]2),过程噪声中σv=0.1,σw=0.5,初始时刻目标运动状态为为半径为2 的圆。具体仿真结果与分析如下:
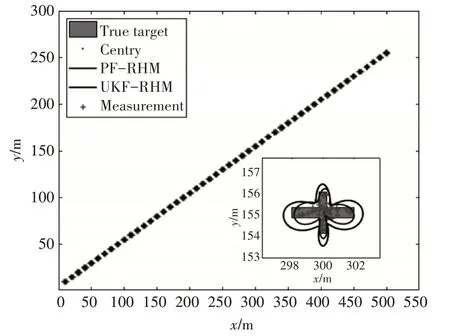
图1 扩展目标跟踪效果图
场景一仿真分析:为验证滤波算法的优越性,与星凸形随机超曲面无迹卡尔曼(UKF)滤波[19]算法作对比。图1 是十字形扩展目标基于星凸形随机超曲面的无迹卡尔曼滤波器和粒子滤波器跟踪效果仿真图,仿真时间T=50,t=30时局部放大。从图中的局部放大可以看出,UKF-RHM 和PF-RHM都能估计出扩展目标外形轮廓。但相比于UKF-RHM,PF-RHM 所估计的外形轮廓边界更加贴近真实目标轮廓,反映在图3 上时,PF-RHM 的拟Jaccard 距离小于UKF-RHM 的拟Jaccard 距离。进一步结合图2 质心估计误差,可得出对于扩展目标的跟踪估计,基于星凸形随机超曲面的粒子滤波器具有更好的估计效果。

图2 扩展目标质心估计误差
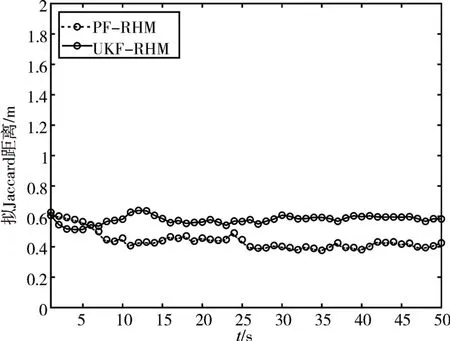
图3 扩展目标形状估计拟Jaccard距离

图4 群目标跟踪效果图
场景二:
设置目标为十字形群目标(Group Target,GT),由20 个点目标组成,每一时刻传感器接收到的量测由组成群目标的点目标产生,量测噪声、过程噪声及初始目标运动状态与场景一相同,设为半径为3的圆。具体仿真结果与分析如下。
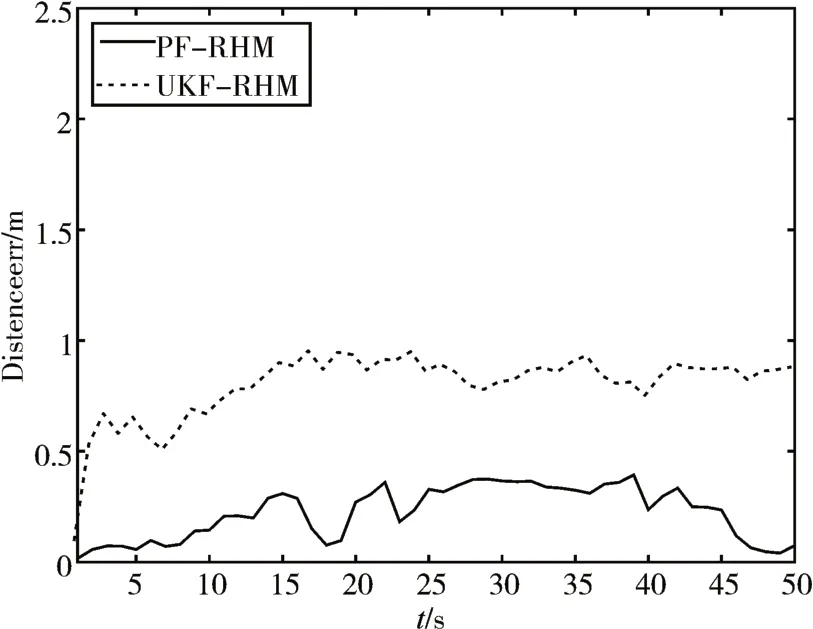
图5 群目标质心估计误差
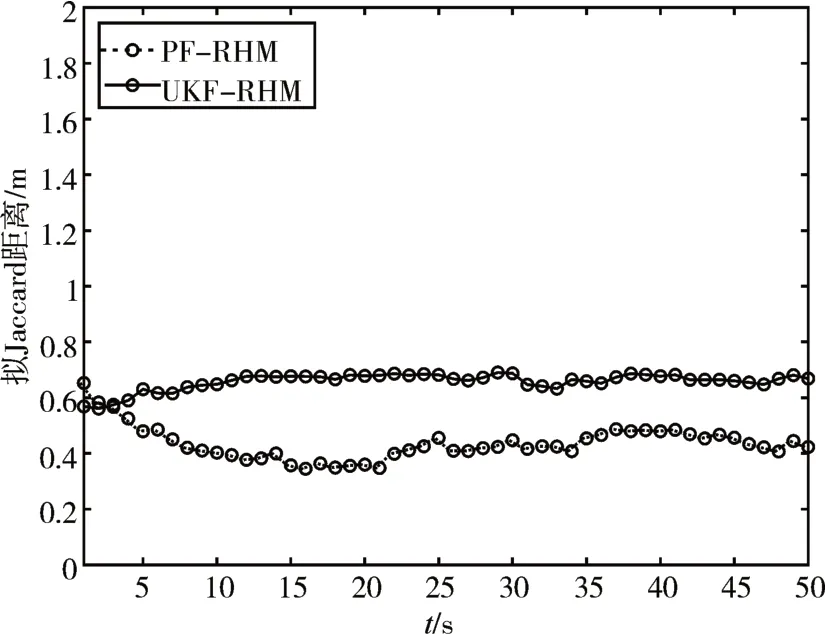
图6 群目标形状估计拟Jaccard距离
场景二仿真分析:不同于扩展目标,群目标的量测产生于组成群目标的每个点目标,利用随机超曲面模型对其量测源建模,用本文提出的星凸形随机超曲面粒子扩展目标跟踪滤波,同样与星凸形随机超曲面无迹卡尔曼滤波滤波算法作对比,仿真时间T=50,t=30 时局部放大。从仿真结果可以知,星凸形随机超曲面的粒子滤波器能够实现对群目标的跟踪估计,且估计的目标形状更准确。
综合上述扩展目标与群目标仿真实验,本文所提出的基于RHM 的星凸形随机超曲面粒子扩展目标滤波算法,对不规则形状的扩展目标以及群目标都能够实现准确的位置跟踪和形状估计,且对于目标尺寸大小的估计要优于星凸形随机超曲面无迹卡尔曼滤波算法。通过拟Jaccard 距离评价指标的分析可得,该滤波算法对于形状的估计具有收敛性,也验证了该算法的有效性和准确性。
5 结语
针对非线性系统下不规则形状ETT问题,本文提出了一种基于RHM 的星凸形随机超曲面粒子扩展目标跟踪滤波算法。RHM 能够对复杂不规则扩展目标形状建模,且易于实现,通过RHM 对星凸形扩展目标形状建模,建立一个高度非线性的量测方程。将RHM 与PF 相结合,详细推导了星凸形随机超曲面粒子扩展目标跟踪滤波算法,并利用该滤波算法对空间中运动的扩展目标和群目标进行轨迹跟踪和形状估计。通过与星凸形随机超曲面无迹卡尔曼滤波滤波算法作对比,验证了该算法的优越性和有效性。
猜你喜欢
课堂内外·小学版(低年级)(2023年6期)2023-04-29 00:44:03
中学生天地(A版)(2022年11期)2022-11-25 07:43:16
制造技术与机床(2019年11期)2019-12-04 05:50:54
数学年刊A辑(中文版)(2019年1期)2019-01-31 02:35:28
新世纪智能(英语备考)(2018年11期)2018-12-29 10:56:52
数学物理学报(2018年5期)2018-11-16 05:49:44
小学生学习指导(低年级)(2016年10期)2016-12-01 06:10:42
浙江大学学报(工学版)(2016年10期)2016-06-05 09:20:56
计算机工程(2015年4期)2015-07-05 08:27:39
华东师范大学学报(自然科学版)(2014年1期)2014-04-16 02:54:52
