雷达网络的现状与发展趋势*
2022-08-02 02:12巩浩然
舰船电子工程 2022年6期
巩浩然 任 圆
(1.92941部队42分队 葫芦岛 125000)(2.渤海船舶职业学院 葫芦岛 125000)
1 引言
雷达在国防、海事控制、船舶以及航空工业等众多军事领域上有着很广泛的应用,特别是射频∕微波技术以及制造技术。因此,雷达网络的高效覆盖与精度在实战操作中至关重要。本文对雷达网络最先进的解决方案以及所面临的挑战进行研究,主要包括雷达网络部署,多目标跟踪以及传感器管理算法。最后,对全文进行总结与展望,为我国雷达网络的未来发展提供一定的理论支撑依据。
2 部署雷达
由于雷达网络是有一定边界值的,所以对雷达传感器的部署会影响雷达网络的整体性能。雷达传感器的部署主要在两个方面,一是传感器部署的密度,另一个是雷达传感器的价格。J.F.Chamberland[1]等根据实践得出,性能普通的平价雷达传感器但是采用密集网络部署所形成的的雷达网络能达到的性能与性能精准但价格昂贵的雷达传感器运用稀疏网络部署所达到的性能是近乎一样的。那么实际运用中则需要根据实际情况进行部署方案的选择,由此可见,雷达传感器的部署对雷达网络的整体性能会产生一定的影响。那么如何运用最低的成本来达到最优的网络覆盖效果成为了研究者们下一步的研究热点。
J.Chen[2]等将双∕多基地雷达放置障碍物上,提出了一种成本最低的雷达部署策略来完全覆盖障碍物,如图1 所示,障碍物的宽度为W ,A 条与障碍物长度平行的部署线来放置发射器Li 接收器Pi。
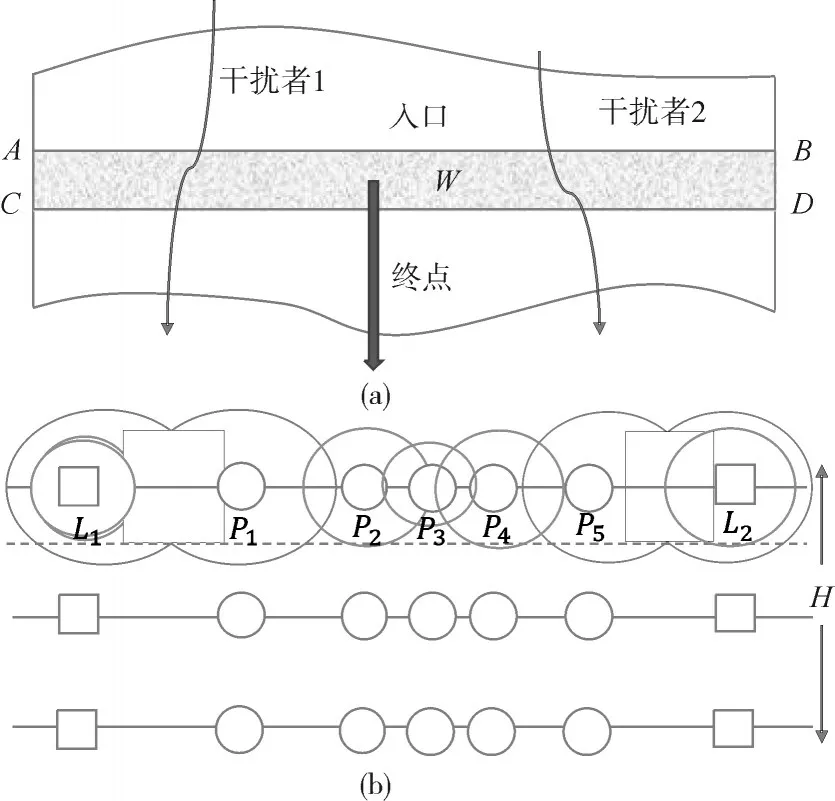
图1 (a)雷达网络障碍物覆盖范围(b)发射机与接收机总成本最小化
每个传感器都有一定的距离检测范围,其感应能力随着距离增大而降低,因此对于距离检测误差进行建模是很重要的,Lloyd 算法是目前最常用的雷达部署算法之一,其可以在最大程度上减少信号在无线传输上的失真问题。Lloyd 算法是最经典的简单的K-mean 迭代算法,首先将所有的点分配给ℎ 个类的系数p,属于第ℎ 个类的为1,否则记为0,公式化表达为
重新计算每个类的中心点,并重复式(4)、(5)直到收敛。
然而,Lloyd 算法也是有一定的缺点,由于聚类产生的类别通常情况下是不平衡的,所以不同类中的样本数量差异会很大,所以在雷达网络部署中只考虑了传感器的覆盖范围,忽略了通信方面的问题。文献[3]中J.Guo 等通过同∕异构的方法同时兼顾了覆盖范围与通信方面的问题,较好地解决了传感器部署问题。
3 多目标跟踪
在雷达网络中,多目标跟踪一直都是一个具有挑战性的问题,因为需要实现一个计算繁琐的统计滤波器。Farina[4]等概述了近四十年来对目标跟踪的不同方法。
最简单的方法是NNSF(最近邻标准滤波器),它可以使用最接近的测量值来更新对当前目标的预测,同时忽略其他的干扰项。为了跟踪多个目标,研究者们根据NNSF 提出了两种改进的方案,一个是次优近邻SNN,它将数据关联视为分配问题,并从最短的距离开始,将每个轨道与其最近的观测值相关联;另一个是全局最近邻GNN,它使用Munkres 算法以获得全局最优方案。但是NNSF 这种滤波器在设计时设定的杂波率很低,因此在杂波率高的情况下效果并不理想。
为了解决这一问题,文献[5]中提出了延伸的概率数据关联滤波器PDAF,可以计算正确关联的概率以进行测量,将测量值使用加权平均来计算轨迹。每种测量值的权重均与其正确关联的概率成比例,在杂波率存在且较高的情况下,PDAF 比NNSF具有更强的鲁棒性。
联合PDAF(JPDAF)是应对MTT 的PDAF 的扩展,可以计算关联的联合概率并用于更新轨道的预测,在杂波率较高的情况下特别高效,而MTT 的另一个关键算法是多重假设跟踪滤波器MHT[6],在杂波率高,轨迹不确定性(例如机动或交叉目标)的情况下表现良好。MHT 的工作原理如下,基于预测的观察结果计算验证,并为每个测量建立一个新的假设轨迹。新的轨迹被独立处理,低概率的轨迹被丢弃,以避免指数增加的轨迹数量。图2 显示了MHT的工作流程。
传统的方法是将MTT 问题分解为多个独立的单目标跟踪问题,而基于Fisst 的方法是同时传播所有的跟踪。为此,一个被称为概率假设密度PHD函数起着关键作用。简而言之,研究者定义了状态空间中目标的强度,而对一个区域的整合则给出了该区域中目标的预期数量。通过仿真比较了PHD和MHT 滤波器的性能[7],MHT 是一种灵活的算法,可以通过修改其参数(例如在轨迹删除和合并以及门控)来提高其性能。一般来说,这两种算法没有任何有效的比较。另一种方法是CPHD,它在杂波率和错误检测方面提供了更强的稳健性。CPHD滤波器比PHD 滤波器更通用,它在更新PHD 函数的基础上,能及时更新目标的数量,特别是在目标数量大的情况下更加优于PHD 滤波器。MTT 的另一种基于裂隙的方法是二阶PHD(SO-PHD)[8],其中除了增加目标数目的方差之外,还增加目标数目的方差。
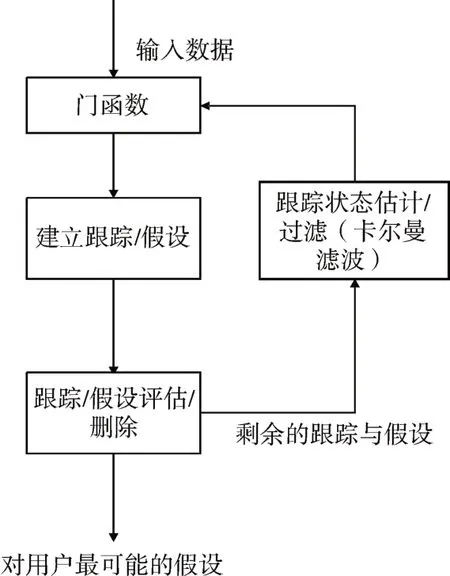
图2 MHT概述
4 数据融合
在雷达网络上采用上述多目标跟踪方法之后,需要一种有效的融合算法来获取总体调谐轨道,常见的融合方法有四种。
4.1 协方差交叉融合
传统的滤波方法需要已知每个传感器的互协方差条件下进行,才能求得最优的分布式融合,这种方法在实际情况下无法完全实现,因此,JULIER S L 等提出了协方差交叉算法CI,这种方法也叫做简单融合[11~16],它忽略了雷达传感器的估计误差相关性,因此减少了很多计算上的负担。当雷达的状态向量之间的相关性未知、处理能力或者内存大小收到限值的时候,CI 特别适合于融合雷达的轨迹,它根据雷达的协方差矩阵对其进行加权来融合雷达的转改向量,通过合并未知相关性的部分来提高跟踪性能。
4.2 逆协方差交叉融合
由于CI 算法仅仅应用了保守局部的估值误差方差,因此其结果具有一定的局限性[17~19],因此J.Manyika等提出了逆协方差交叉算法。雷达将观测结果发送到FC,利用KF 或者其他的派生工具EKF或者UKF 等来跟踪。在KF 滤波器中,流程模型起到了至关重要的作用。因此,为了弥补建模误差,研究者们提出了改进的强跟踪融合MSTF 方法,该方法将预测的估计协方差衰减一个因子,该因此是通过将实际创新协方差的近似值与KF给出的理论协方差的近似值来获得的。但是用于协方差融合式的PHD 滤波器计算过于复杂,并且需要几个简化的近似值,所以研究者们对接收到的观测数据进行预处理,并将其聚类在一组相应的测量数据中。
4.3 信息图
信息图是一种通过冗余信息来克服FC融合数据中存在相关性的解决方案。当多个节点报告相同的数据时,其中只有一个是FC的新节点,其他的节点数据都是冗余的,这种冗余属于信息的重复计数。任何两个或更多节点的公共信息可以通过识别信息图中它们的公共前节点找到。然后,在贝叶斯公式中去除数据集中的条件依赖性,但是这种方法不适用于动态配置网络。
4.4 分布式MTT-DMTT
在分布式MTT-DMTT 的方法中,所有的雷达在与其相邻进行信息交换之后到达同一轨道,由于分布式进行融合,一次雷达传感器的目标是本地更新融合基数和目标位置,使得估计值尽可能接近CPHD 中央滤波器给出的估计值,使得跟踪性能有了进一步的提升。
5 传感器管理
在雷达网络中,通信带宽和雷达微粒能量等资源是有限的,因此传感器管理机制对于网络的有效使用和延长其寿命是很重要的。推力驱动传感器管理是指通过将任务分配给确定的一组传感器来确定管理网络有限资源的最佳方法,如图3所示。
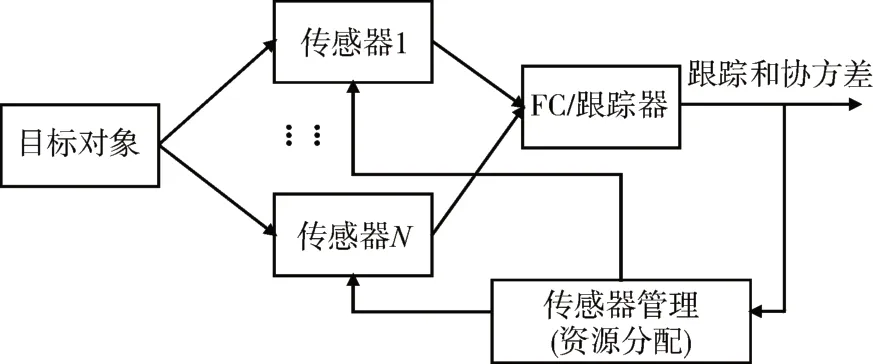
图3 管理资源有限的雷达传感器
传感器管理通常是是一个非凸优化问题,通过凸松弛可以达到次优解,Y.Zhao[9]等提出了基于多目标优化的框架,将跟踪精度与数量运算作为目标函数,寻求一个可以平衡多个目标函数的最优解决方案。常用的多目标优化算法,例如NSGA-III 算法等可以应用到其资源管理中。
传感器管理的其他解决方案主要是基于信息理论方法,可以将网络中的一些传感器分配为锚节点,基于这些传感器获得所需目标源的粗略估计,然后在每次的迭代中激活一组或几个非锚传感器,其数据可使目标源位置和能量传感器的测试值之间的相互信息MI最大化。
6 结语
本文研究了雷达网络的现状以及重点技术方向的解决方案,由于雷达网络的迅速发展,解决方案极其重要,每一种解决方案都必须满足雷达网络的固有限制,尤其是通信方面以及可伸缩性方面的限制。总而言之,雷达网络可以为军事、商业以及很多领域提供大量的信息,通过关键技术的研究可以降低雷达网络部署成本,并且足够抵抗恶劣的外界环境条件;通过使用信号处理的方法,提高了雷达探测信息的准确性。未来的研究中可以通过开发精算模型并在数据融合方面加入人工智能的开发,进一步提高雷达网络整体性能,有助于自主决策实施,这种结合可能是未来的研究重点领域。
猜你喜欢
客联(2022年4期)2022-07-06
科学导报·学术(2020年43期)2020-10-29
科普童话·百科探秘(2020年5期)2020-09-14
当代陕西(2020年13期)2020-08-24
非公有制企业党建(2020年5期)2020-06-16
当代陕西(2019年24期)2020-01-18
小学生导刊(高年级)(2016年11期)2016-11-14
智能计算机与应用(2016年1期)2016-03-02
少年科学(2015年7期)2015-08-13
小哥白尼·军事科学画报(2009年4期)2009-05-11