MATLAB仿真技术在电动机变频调速中的应用
2022-08-01 05:33赵忠杰
上海大中型电机 2022年2期
赵忠杰
(哈尔滨电气动力装备有限公司,哈尔滨 150040)
0 引言
三相异步电动机由于结构简单、易于维护等特点,广泛应用于工农业生产之中。从电动机的基本原理可知,其主要有三种基本的调速方法,即变极、变频、调压调速方式。其中变频调速采用改变电源频率的方法,改变旋转磁场的同步转速,从而达到电动机调速的目的。通常将电动机的额定频率称为基频,频率的调节可从基频以上或以下调节,如果频率连续可调,则转速调节曲线是平滑且连续的。由于电动机的变频调速过程是动态非线性的,故采用相关的虚拟仿真软件进行分析,已经成为国、内外研究的重点。
Matlab仿真工具自问世以来凭借其强大的数值计算能力,迅速成为各个学科和工程技术领域主要的计算机仿真平台,能有效应用于电机与拖动系统等工程技术问题的仿真。本文在Matlab/Simulink仿真平台的基础上,建立三相感应电动机的仿真模型,可以形象直观地展示感应电动机的调速特性过程[1]。
1 感应电机仿真数学模型
感应电动机运行中的主要问题包括起动、调速和制动,根据使用场合的不同,电动机有多种不同的调速方法。感应电动机的数学模型是一个高阶、非线性、强耦合的多变量系统,动态和静态特性都很复杂[2]。研究感应电动机的数学模型时,先进行如下假设:定子三相绕组完全对称,其产生的磁动势沿气隙圆周呈正弦分布,定子电流、转子磁场分布都对称;忽略磁路的饱和、齿槽等影响;认为绕组的自感、互感都是线性的;忽略铁心损耗;不考虑绕组电阻受频率、温度变化的影响[3]。电动机动态仿真Matlab模型都与微分方程求解有关,其数学模型都是由微分方程组所构成的,因此对电动机的调速进行仿真的过程就是采用Matlab软件解决微分方程组的问题。
经过三相静止-两相静止坐标变换及两相旋转-两相静止坐标变换,可得出两相静止坐标系上的数学模型,其中电压方程为:
磁链方程为:
转矩方程为:
转速方程为:
式中:Lm=3/2×L1m为α、β、ο静止坐标系上定子与转子绕组的互感;Ls=Lσs+3/2×L1m为α、β、ο静止坐标系上两相定子绕组的自感;Lγ=Lσγ+3/2×L1m为α、β、ο静止坐标系上两相转子绕组的自感;R1、R2为定、转子电阻;TL为负载转矩;J为机组的转动惯量;np为极对数;ωγ为电机转子的旋转角速度(转子所有阻抗均为折算到定子侧的值)。
根据以上公式,即可以得到感应电动机在两相静止坐标系中的仿真模型。感应电动机的动态数学模型可以有各种表现形式,不同的动态数学模型是为实现不同的控制策略服务的,基于电动机动态模型的调速系统,能实现高动态性能。
2 感应电机的仿真模型线路搭建
2.1 Simulink模型线路搭建
在忽略定子漏阻抗的压降情况下,当定子绕组外加电压U1时,就在铁心中产生与U1同频率的交变主磁通φm,φm与外加电压成正比。当外加电压频率减小时,主磁通φm将增大,会使磁路过饱和,导致励磁电流激增,铁心损耗增大,电动机发热严重。所以,在基频以下进行变频调速时,为保证主磁通φm不变,所以要求电动机调速时电压U1与频率f同步控制,不能让励磁电流过大。考虑到电动机绕组绝缘的电压等级要求,当频率在基频以上进行调速时,应保持电压U1不变,主磁通φm随频率f的上升而减小,电动机处于弱磁运行状态,电动机转矩较低。以上过程均具有非线性状态属性,故采用解析方法得到的都是近似数据结果,所以通过Matlab/Simulink对电机进行调速仿真尤为重要[4-5]。
使用Simulink电力系统SimPower-Systems仿真模块,选取适当的电力电子器件模型搭建主电路,在Simulink模型窗口,选择2个三相交流电压源、2个熔断器、异步电机及示波器等模块构成电动机起动模型,构建后的模型如图1所示[6-7]。

图1 感应电动机变频调速仿真模型
2.2 模块参数设置
仿真时把三相交流电压源的有效幅值设置为220 V,初相位分别设置为0°、120°、-120°,频率为50 Hz,电动机设置为鼠笼型,设置Mechanical input为Torque Tm。电动机的功率设置为1 800 W,电压为380 V,频率50 Hz。定子绕组电阻为0.542 Ω,定子自感为0.0 025 H,转子绕组电阻为0.805 Ω,转子自感为0.0 023 H,电机极对数设置为2。
3 感应电机的仿真结果
运行上述仿真模型,可以得到仿真结果,如图2~图5所示,分别给出了基频以下变频调速时的定子电流、转子电流、电磁转矩和转速随时间变化的仿真曲线波形,图6~图9分别给出了基频以上变频调速时的定子电流、转子电流、电磁转矩和转速随时间变化的仿真曲线波形,其中阶跃模块(Step)时间设置为0.5 s。
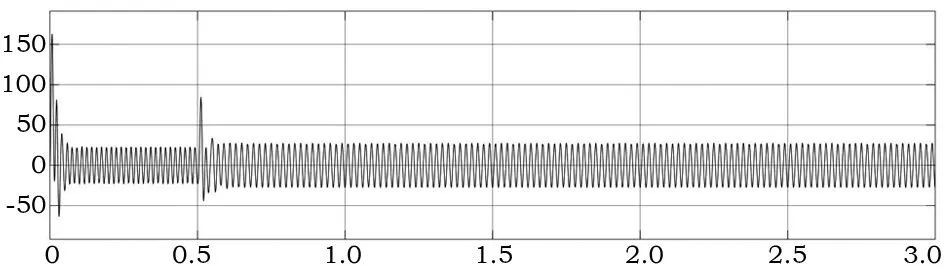
图2 感应电动机定子电流波形(基频以下调速)
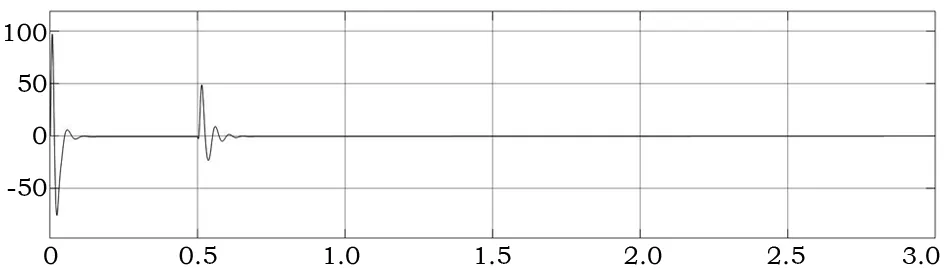
图3 感应电动机转子电流波形(基频以下调速)

图4 感应电动机电磁转矩波形(基频以下调速)
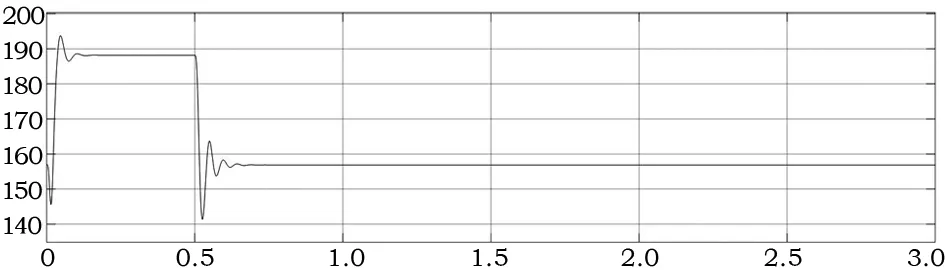
图5 感应电动机转速波形(基频以下调速)
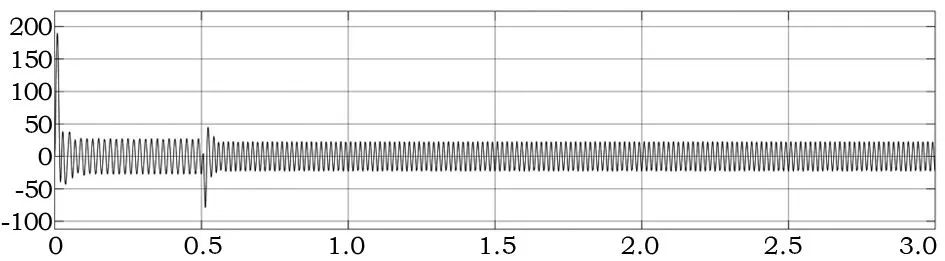
图6 感应电动机定子电流波形(基频以上调速)
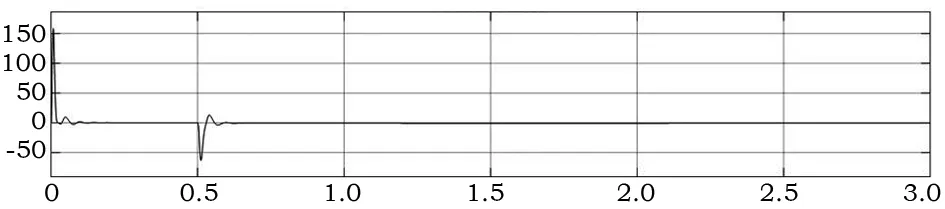
图7 感应电动机转子电流波形(基频以上调速)
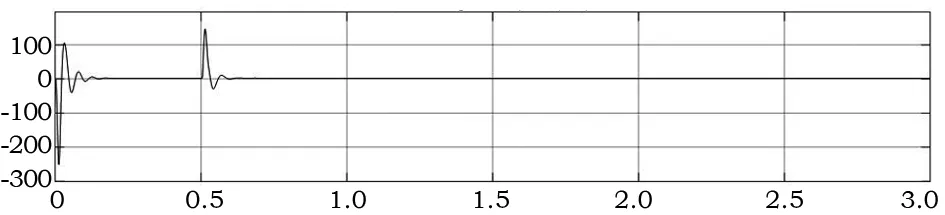
图8 感应电动机电磁转矩波形(基频以上调速)
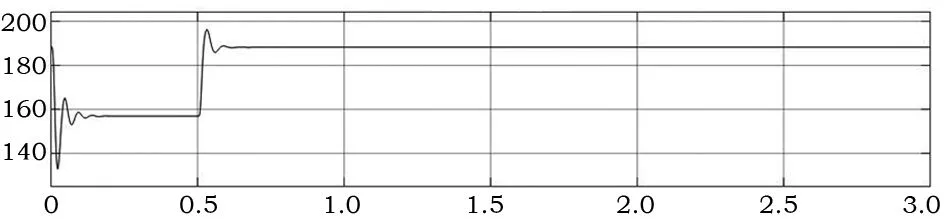
图9 感应电动机转速波形(基频以上调速)
电动机各个被测参数都随时间相应地改变,电动机起动过程在很短时间内完成,电机电磁转矩、电流在初始启动阶段呈现波动,电动机稳定运行后趋于稳定。定子和转子电流较直接起动时变小,这是因为对电动机外加电压进行了降低的缘故。转子转速在设置0.5 s的时间处发生阶跃响应,可以对应出电动机在50 Hz和60 Hz时转速的不同。
4 结论
将MATLAB软件应用于感应电动机的调速特性的仿真过程中,可以将许多抽象的概念、原理以形象仿真曲线、图形表示出来。本文对感应电动机的调速特性进行了模拟分析,分析模型和结果曲线形象的表现了电机调速过程中,电机内各个参数的变化,表明采用Matlab/Simulink软件对感应电动机的调速进行仿真,具有较大的应用价值。
猜你喜欢
中国人民公安大学学报(自然科学版)(2022年1期)2022-07-20
中国特种设备安全(2022年1期)2022-04-26
新疆大学学报(自然科学版)(中英文)(2022年2期)2022-03-27
防爆电机(2021年6期)2022-01-17
防爆电机(2021年3期)2021-07-21
防爆电机(2021年1期)2021-03-29
微特电机(2020年11期)2020-12-30
山东交通科技(2020年2期)2020-08-13
电子制作(2017年1期)2017-05-17
电子制作(2017年20期)2017-04-26