星载触发式瞬态目标智能感知算法
2022-08-01 02:29徐安林郭绍刚贺盈波季月明
空间控制技术与应用 2022年3期
徐安林, 郭绍刚, 贺盈波, 季月明
1. 北京跟踪与通信技术研究所,北京 10094 2. 北京控制工程研究所,北京 100190 3. 深圳航天东方红卫星有限公司,深圳 528000
0 引 言
随着空间技术的发展,各种类型的卫星如通信卫星、导航卫星、遥感卫星等,极大的改变了人类的生存方式.然而,随着空间的进一步利用,空间变的越来越拥挤,空间卫星面临着来自空间碎片、失效航天器、敌国航天器恶意袭击等潜在威胁[1-4].目前,已编目的直径大于10 cm的空间碎片约20 000个,大部分集中在低地球轨道,而尺寸小于10 cm的空间碎片数量更大.这些碎片与正常在轨服役卫星发生碰撞,将引起严重的后果.对于失效航天器引起的卫星事故,例如:2009年2月9日,美国“铱-33”通信卫星和俄罗斯的报废卫星“宇宙2251”在780 km高度相撞,两星瞬间产生大量的垃圾碎片,“铱-33”随之报废.此外的,空间飞行器还面临着来自敌国航天器的恶意接近、袭击等威胁.例如,SPACE X星链,星链-1095和星链-2305两次接近我国空间站,为此我国空间站在2021年7月1日和2021年10月21日两度进行主动变轨躲避.如果不是我们及时躲避,极有可能发生碰撞事故,给空间站和航天员带来极大危险.
针对在轨卫星面临着来自非合作目标(空间碎片、失效航天器、敌国航天器均属于非合作目标)的潜在威胁,需研究基于星载的目标预警感知系统[5-9],在发现有威胁时,能够及时报告给控制系统和地面测控中心,并进行规避避险.然而空间目标的识别存在以下几方面的难点:第一,目标相对运动速度快,可达几马赫,甚至几十马赫.因此,对探测系统的高速检测能力提出了苛刻的要求.第二,目标背景复杂,如面临着地球背景、月球背景、及地球临边环境影响.对探测系统,一方面要求具备在地气光和月球反照光下的探测能力;另一方面需具备在复杂背景下目标的提取和识别能力.第三,目标动态范围大,主要体现在两个方面,一方面目标自身由于和太阳夹角的不同,导致目标在被观测方向能量变化大于100 dB以上,另一方面,目标在强光背景下,如太阳背景下,背景动态变化范围更是远大于100 dB以上.因此,要求探测系统具有大的动态响应范围.第四,星载数据传输带宽受限,平台运算能力有限,要求探测系统数据量能够尽量压缩,提高数据利用率,减少数据量.
对于星载预警感知系统面临的四大难题:高速探测、复杂背景、高动态、高数据利用率等的需求,现有基于帧处理的传统探测技术面临不足,亟需新探测方案、新探测机制.本文提出的基于星载触发式瞬态目标智能系统,其本质是突破传统的“帧处理”图像探测技术,采用一种新型神经形态学“硅视网膜(silicon retina)”探测机制,对目标光强的变化进行感知,输出采用地址-事件异步传输模式,与传统探测器明显不同,具有时间响应灵敏度高,光强动态范围大,数据利用率高等特点,为上述相关问题提供了解决思路.本文首先对星载触发式瞬态目标智能感知系统进行介绍,然后介绍目标智能感知算法.相关的试验结果表明,该算法对目标的实时检测和追踪能力强,具备在轨对目标预警和感知的能力.
1 星载触发式瞬态目标智能感知系统
星载触发式瞬态智能感知系统采用仿生神经形态学探测方案,基于动态有源像素视觉探测器(dynamic and active pixel vision sensor, DAVIS)的探测机制,实现单一探测器动态有效像素+传统积分型帧处理机制的有效融合,解决对空间目标的检测和识别问题.整个系统包括光学系统、DAVIS探测器、智能处理模块,以及整机机械结构.通过伺服机构,实现对大于2π空间目标的检测预警.系统的组成如图1所示.
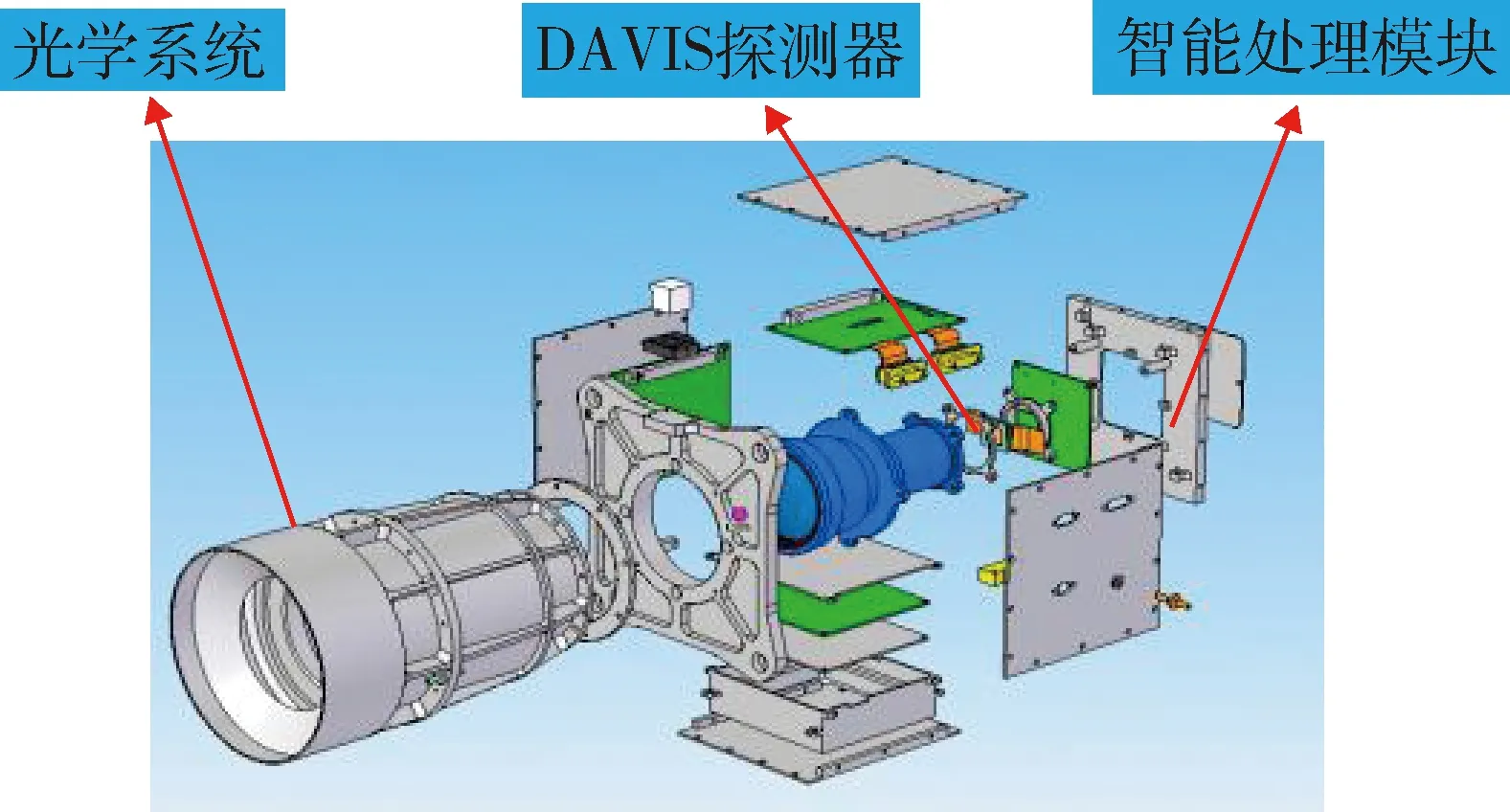
图1 智能感知系统组成Fig.1 The composition of the intelligence perception system
1.1 光学系统
主要包含光学系统设计和遮光罩设计.光学系统的成像光路如图2所示.光学元件的入瞳为20 mm,系统的焦距为60 mm,光学系统的视场为10°×10°.优化设计时设定光学系统的物距为无穷远,光谱范围为470~750 nm,中心波长为620 nm.如图2所示,为对应光学系统光路和光学传递函数MTF.
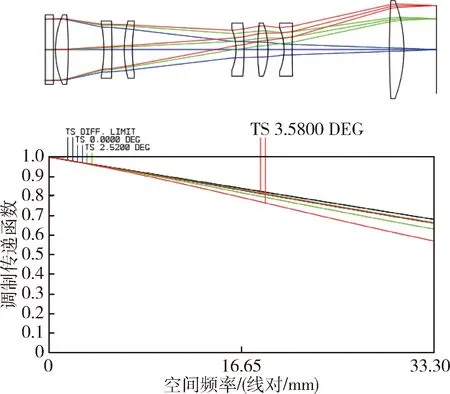
图2 光学系统及传递函数图Fig.2 The composition of optics system and MTF
遮光罩结构形式的确定与杂散光的衰减需求、视场角、遮光罩口径和长度、内表面涂层吸收特性、杂散光光源的种类和分布、杂散光强度等因素有关.
遮光罩按照遮光结构可以分为挡光环式遮光罩、无挡光环式遮光罩;按照消光原理可以分为吸收型遮光罩和反射型遮光罩.由于反射型遮光罩要求遮光罩内表面对杂光高反射,这对表面涂层特性或表面工艺要求较高,并且目前还没有合适的涂料,所以一般不选用反射型遮光罩.
挡光环式遮光罩是指在遮光罩内部设计各种挡光环,以有效抑制进入遮光罩的杂散光.挡光环式遮光罩可含一级遮光罩和二级遮光罩.二级遮光罩安装在一级遮光罩前端.通过二级遮光罩,杂光至少会经过3次散射到达光学系统表面,使遮光罩的杂光抑制能力较强,但由于二级遮光罩的存在,整个遮光罩的尺寸和口径将增大.根据对遮光罩杂光抑制能力的分析,及设计指标中对遮光罩外形尺寸、各光学系统之间视场遮挡的限制,本文采用了吸收型一级挡光环式遮光罩,消光漆吸收效率>99.9%,最终PST<1×10-7.
1.2 DAVIS探测器
传统视觉敏感器,无论是CCD 还是CMOS 图像传感器,都是采用基于“帧扫描”的采样方式,高分辨率和高帧频会产生巨大的数据量并且需要更高的传输功耗,同时也会增加对信道带宽和存储器的要求.此类基于“帧扫描”的图像传感器,图像信息的采集和处理是相互独立的过程,只有上一级的处理全部完成才会进行下一级的处理.
本文采用新型的神经形态学芯片,其基于地址-事件表示异步感知传输模式(address event representation, AER),探测器时间响应灵敏度达到us量级,动态范围达到140 dB.传感器对于同一像素点上的光强信息进行连续检测,当相对变化超过设定的阈值范围时,异步独立地输出该像素点的位置信息和事件属性.该传感器具有生物视觉传感器的特性:稀疏表示、事件形式输出、仅输出光强变化的位置、正负极性信号有各自的输出通道.相比于同步输出模式,异步感知架构采样输出点较少,从源头上减小了数据冗余,同时也降低了后端图像数据处理的压力,提高了视觉系统的实时性.
神经形态学探测器根据是否输出绝对强度,可分为三种,动态视觉探测器(dynamic vision sensor, DVS),基于时间的异步图像探测器(asynchronous time-based image sensor,ATIS),动态有源像素视觉探测器(dynamic and active pixel vision sensor, DAVIS)[10-16].本文采用DAVIS芯片,其结构简图如图3所示,包括两大部分:APS和DVS,APS采用传统的帧曝光模式,用于获得亮度图,用于对背景场景或者近距离成像分析;而DVS则是AER机制,包括光感知器、差分器、比较器.选用DAVIS的优势在于,既能保证远距离的高速成像,同时又可以根据需要采集相应的灰度信息.

图3 DAVIS结构示意图Fig.3 The sketch of DAVIS composition structure
1.3 智能算法
星载触发式瞬态目标智能感知算法,主要是实现对高速目标的瞬态捕获、追踪、预警和感知等.感知系统采用仿生神经形态学探测器,基于触发机制,该探测器输出数据格式为异步二进制,即采用AER表示,数据输出速率在us量级.探测器自身由于高速响应的特点,自身具有极大的虚警和噪声,如图4所示.因此算法上需要经过特殊的处理[17-20].
AER表征的视觉芯片具有数据稀疏表示的特性,理论上芯片输出的数据流中只包含运动目标的信息,数据量大大减少.但在实际使用中,AER芯片的输出包含一定的噪声,需要将实际目标与噪声加以区分.基于AER表征的事件流,结合目标具有一定的轨迹、非孤立像素特性,本文采用基于脉冲神经网络的去噪算法,实现对非目标信号的有效剔除.
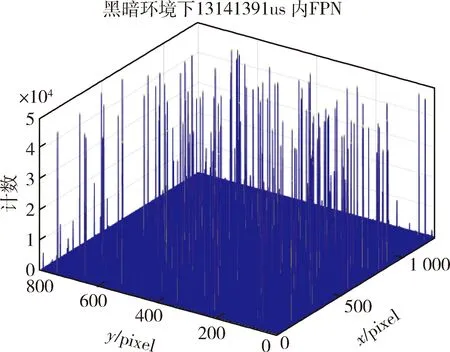
图4 DAVIS探测器固定模式噪声Fig.4 The FPN of the DAVIS sensor
对原始数据进行去噪后,需继续完成对目标的识别,其关键在于虚警的剔除和目标的追踪.在追求极致对暗弱信号的高灵敏度和高速探测,必然伴随着大的噪声,因此需要采用合适的滤波算法和追踪算法,实现对目标的高速准确检测.目前,常见的检测追踪算法分为两大类:跟踪前检测(detection before tracking,DBT)和检测前跟踪(tracking before detection,TBD).DBT类检测算法是一类经典的弱小目标检测算法,它的基本思想是在背景抑制的基础上,先进行单帧检测获得候选目标,再根据目标运动的连续性进行多帧确认.TBD算法主要应用于信噪比较低的图像序列中,此时图像中目标受到噪声及背景干扰的影响,基于单帧检测的常规DBT算法已无法检测出真实目标.TBD算法的核心思想是先跟踪所有可能的运动目标观测量(如灰度值、坐标变化),依据目标的观测量计算各条运动轨迹的概率值,如果某条轨迹所计算出来的概率值大于设定好的阈值,则认为该轨迹为一条真实的目标运动轨迹.TBD目标检测算法目前主要有:基于动态规划的目标检测算法、基于联合概率滤波的目标检测算法等.此外还有高阶相关、粒子滤波等检测方法.本文采用TBD技术,具体方案为基于联合概率滤波的目标检测算法.
考虑到探测器对光强变化的高速异步响应特性,采用脉冲神经网络算法去噪,能够有效的提出非相关信号,并保证一定的时效性.为了对弱目标能够进行更好的探测,结合输出数据的高频响应特征,采用TBD技术中联合概率滤波的目标检测算法对目标进行追踪检测.因此,星载触发式智能感知系统的算法方案为:脉冲神经网络去噪+联合概率滤波算法方案.
2 目标智能感知算法
目标智能感知算法通过对输入的事件流信号进行处理,通过扣除本底(FPN)、去噪、目标追踪等流程,实现对目标轨迹和运动状态参数的输出,算法流程如图5所示。
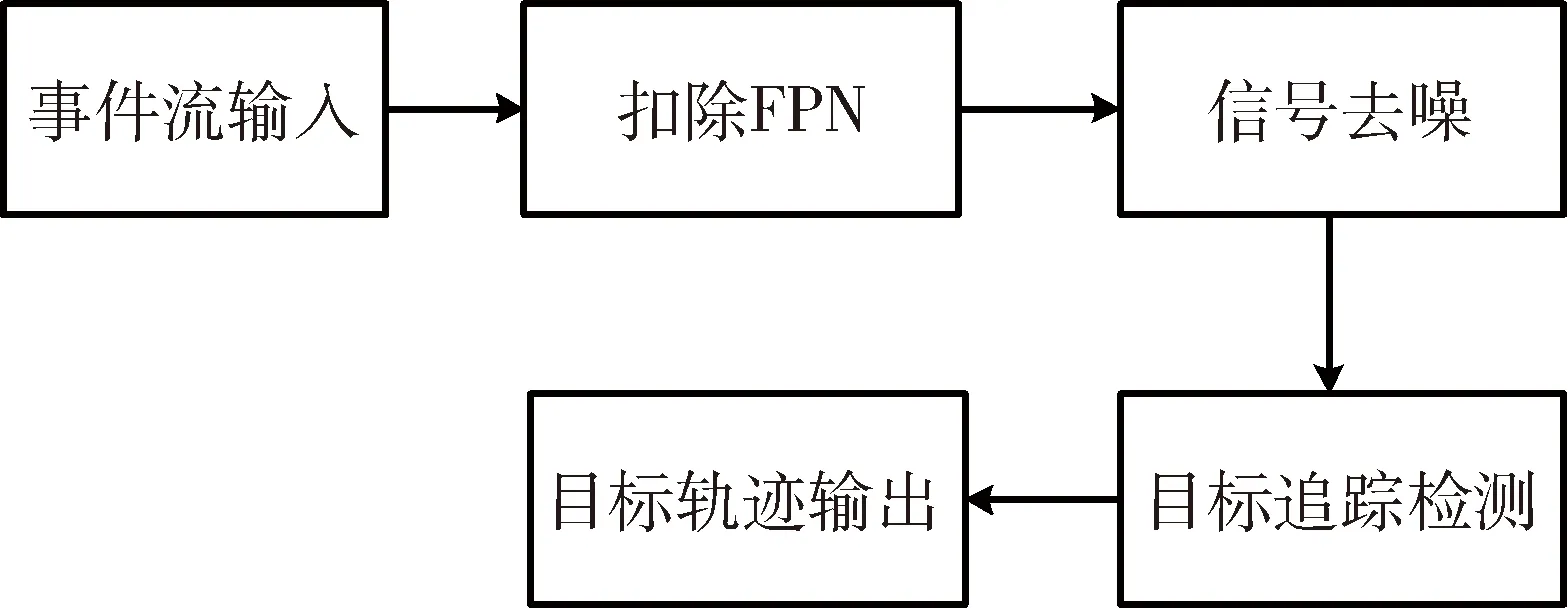
图5 算出流程图Fig.5 The algorithm procedure flowchart
2.1 脉冲神经网络去噪
神经网络采用逐层连接的方式,实现对输入原始数据特征的深度提取,最终输出期望的高阶语义信息.如经典的卷积神经网络,目前在图像识别领域得到了广泛的应用.
脉冲神经网络称为第三代神经网络,通过对离散的含时脉冲信号进行计算,模拟生物神经元的感应过程,只有当输入的脉冲信号以一定的表征方式超过类似生物细胞“膜电势”阈值时,才认为是有效的神经元响应,以此来实现对噪声滤除.根据多层神经元的序列连接响应,进而提取出兴趣信号.
神经形态学探测器获取的AER事件信号,其在物理上表现为孤立高速的脉冲信号,而脉冲神经网络算法恰好与之相匹配,具有低功耗和超快的运行速度.当追踪器检测出符合识别要求的目标时,首先进行的操作是对目标所属的事件流进行特征提取,接着才能送入分类器中做最后的判决.根据目标在空间上轨迹的连续性,以及目标经光学系统后的非孤立性(即目标所占像素至少大于2×2以上),通过在不同背景和光照环境下,进行大量的背景数据采集,可以获取噪声数据集,通过一定的训练方式,可现实对噪声的有效滤除.
经典的脉冲神经网络模型如Hodgkin-Huxley(HH)模型,HH模型描绘出膜电压的生物特性,关注细胞内外离子迁移和变化过程,与生物细胞吻合度较高,但运算量,难以实现大规模运算.为了解决HH模型运算量的问题,Leaky Integrate and Fire(LIF)模型应运而生,其关注事件产生的结果,对其机制进行简化,如将诸多细胞膜的电特性看成电阻和电容的有效组合.LIF模型顾名思义,脉冲响应过程可认为包括三种过程:①Leaky(泄露):表示输入信号不足以超过膜电势阈值,膜电势会在后续不断泄露,即类似细胞内外的离子交换,膜电势会随着时间推移,逐渐泄露,直到零位.②Integrate(积分/求和),表示神经元会将对应位置接收到的信号不断累积求和,直到满足一定的条件才释放,回零.③Fire(激活):即当②累积的信号超过膜电势阈值时,神经元会向后端发射脉冲,同时将膜电压回落至零位.在激活和回零之间的存在的时间间隙,称之为不应期,此时神经元不对输入的信号进行响应.
LIF模型单元逐层连接,形成深度网络,基于LIF模型的脉冲神经网络.卷积神经网络主要依靠误差反向传播原理进行有监督的训练,在学术和工业实践中均取得了较好的成果.而脉冲神经网络模型,神经信息以序列脉冲的方式存储和发送,各个神经单元内部变量和误差函数不具有可微性质,因此传统的反向传播训练算法不能直接适用于脉冲神经网络的训练.脉冲神经网络的训练,主要是实现脉冲序列相关的可塑性(spike timing dependent plasticity, STDP),通过对不同层神经元权重的调整,使得发放的峰值信号,能够对有效信号响应.常见的如无监督学习算法:基于赫布法则(Hebbian Rule),对相邻突触的放电时间进行选择;而有监督学习算法,如Hebbian学习算法,通过“教师”信号,使得突触在目标时间内对发放的脉冲信号权值系数进行有效学习,最后使用正则化技术对各层权重进行规范化,最终实现对有效目标的检测和分类.
如图6所示,是采用脉冲神经网络去噪,并进行时间累积后的目标轨迹图像,从结果可以看出,绝大多数噪声已被滤除.图6采用LIF模型,用积分仿真神经元,当神经元的膜电位达到设定的阈值时进行脉冲发放,只有经过一段时间当突触后神经元的膜电位达到阈值才会产生脉冲发放.其表达式如(1)所示,主要由电阻R和电容C组成,突触前神经元i发放脉冲会产生外部电流I(t),RC电路由于外部电流的作用会一直积累,当神经元膜电位达到神经元脉冲发放阈值时,电路会产生脉冲发放.
(1)
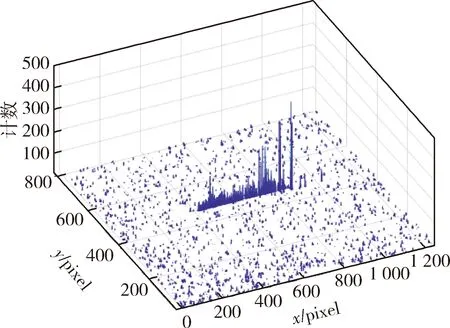
图6 脉冲神经网络去噪结果Fig.6 The result of SNN denoising algorithm
2.2 联合概率滤波检测追踪
联合概率滤波是联合概率数据关联滤波的简称(joint probabilistic data association filter, JPDAF),是贝叶斯框架下的一种目标检测追踪方法.其能够在目标密度较大(多目标)的情况下,实现比较精确的目标检测和追踪.其核心思想是利用跟踪轨迹周围一定范围内的联合测量值作为新轨迹的状态进行更新,以减少测量值周围的杂波引起的较大误差.该方法属于比较传统的、经典的多目标追踪检测算法,限于篇幅限制,本文不进行诸多论述.
3 试验结果
为了对智能感知算法的能力进行验证,在地面开展了相关的试验验证.在敏感器前端20 m处放置抛射器,通过抛射器抛射抛射5 mm的小球,调整初始抛射方向,敏感器对小球的运动轨迹进行监视,试验结果如图7所示,图中3种不同颜色的曲线表示对3个不同目标的检测和追踪,而背景孤立的信号为经过脉冲神经网络去噪后的残余信号.试验结果表明,本文所采用的基于脉冲神经网络去噪+联合概率滤波算法,对基于AER表征的二值编码高速信号具有很好的检测效果,未来可在轨应用于星载触发式智能感知系统.
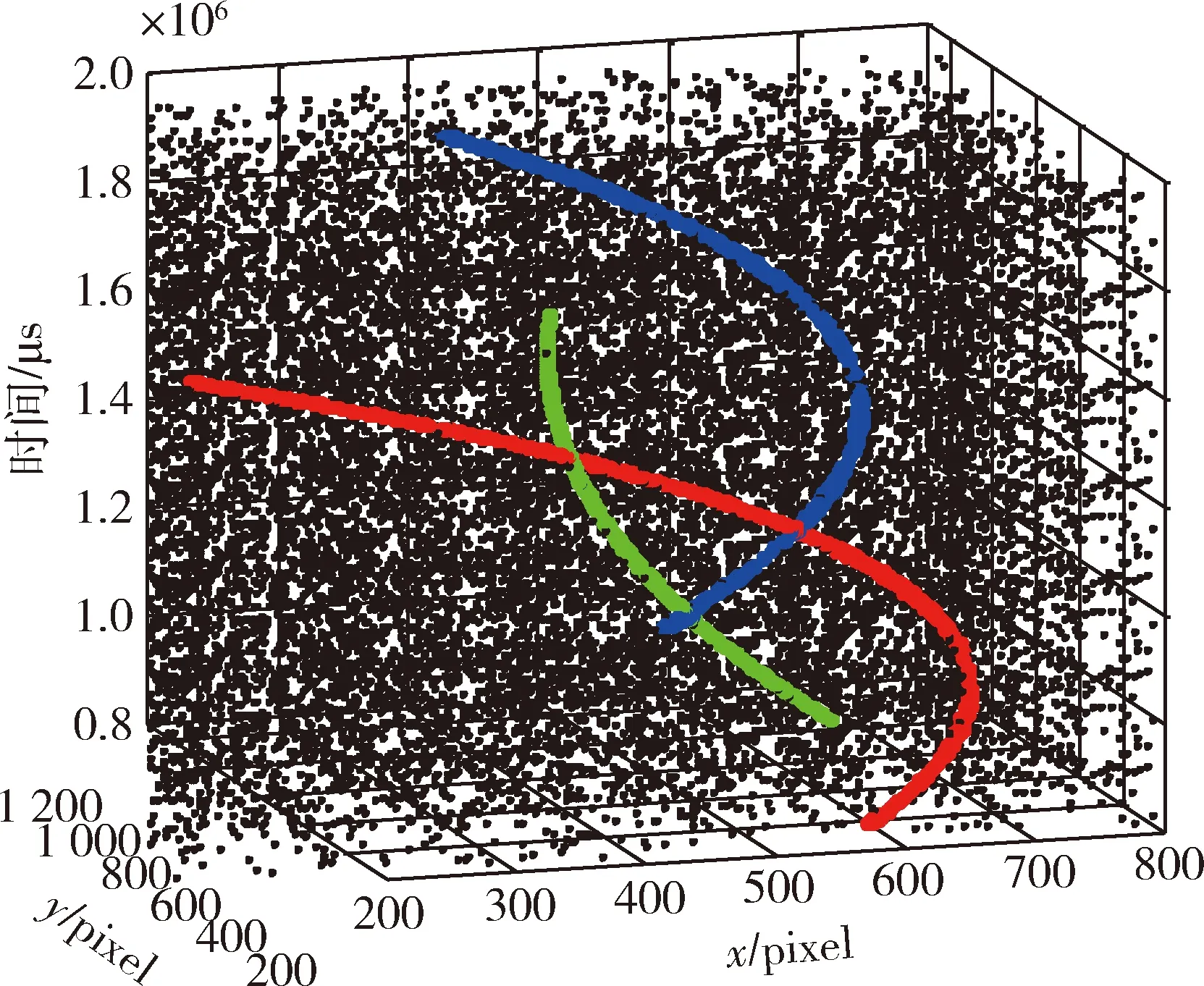
图7 智能感知算法识别结果Fig.7 The recognition result of intelligence algorithm perception
4 结 论
本文对星载触发式瞬态目标智能感知系统进行了介绍,并详细介绍了目标智能感知算法.通过设计了脉冲神经网络去噪+联合概率滤波检测追踪的算法方案,该智能算法具备对多目标较好的检测和追踪能力,未来可应用于在轨实时处理系统.
猜你喜欢
科学导报(2021年7期)2021-02-22
电子产品世界(2021年8期)2021-01-16
学苑创造·A版(2020年10期)2020-11-06
小学科学(2020年1期)2020-02-18
百科探秘·航空航天(2020年12期)2020-01-22
中国计算机报(2019年49期)2019-02-07
小学科学(2019年12期)2019-01-06
中国新闻周刊(2017年36期)2017-10-21
晚晴(2016年11期)2016-12-20
创新时代(2016年8期)2016-10-21