基于改进A*算法的物流无人机路径优化
2022-08-01 04:02张森森李科扬
现代计算机 2022年11期
张森森,陈 肯,李科扬
(中国民用航空飞行学院空中交通管理学院,广汉 618307)
0 引言
随着经济的发展,人们对物流配送服务的要求越来越高,而物流无人机凭借其不受交通限制、调度方便灵活、速度快等特点,能有效破解物流末端“最后一公里”的难题,很多物流企业顺应潮流发展无人机物流服务,中国民用无人机的发展已经进入了快速增长阶段,因此对于无人机物流路径的研究具有现实意义。文献[4-6]研究了车辆-无人机组合运输问题,以运输固定成本、运营成本和时间窗成本之和为目标函数,构建了基于TSP 的车辆-无人机扩展路径模型,通过一种改进的迭代算法,确定无人机配送路线;文献[7-14]运用函数模拟及栅格法建立环境模型,利用多种改进的A*算法、遗传算法、粒子群等算法仿真无人机三维运行环境下的最优路径;文献[15]提出了一种在侦察区域内通过扫描获取侦察带宽的方法侦察指令,然后结合无人机侦察飞行轨迹计算最短路径原理;文献[16]把各个航路点拆开处理,根据不同航路点分别进行定向搜索,通过仿真实验验证定向进化的可靠性;文献[17]对有禁飞区的区域进行路径规划时,通过建立飞行威胁模型,用双向搜索策略和逆向引导策略解决此类问题。
前人的研究成果主要倾向于无人机的碰撞风险、自主智能避障等方面;对于复杂低空、影响路径规划的因素进行了简化处理,不符合无人机真实运行场景。本文基于栅格法模拟无人机运输三维环境,以路径最优化为目标,利用改进的A*算法与传统A*算法和RRT算法比较分析,探索物流无人机最优路径。
1 环境模型
环境建模的目的是模拟无人机真实运行场景,通过模拟分析研究物流无人机路径优化问题。利用栅格法的建模思想,将无人机运输环境模拟为有很多小方块组成的空间,相当于把三维空间数字化处理,同时令障碍物为1,非障碍物为0。栅格的大小会影响到模拟效果,栅格较小时由于需要存储较多的信息,干扰信号也会随之增加,规划效率和效果随之下降;反之,很少的信息存储量会使得规划效率随之加快,但环境信息划分会变得较为模糊,不利于有效路径的规划。因此,选择合适的栅格大小也是影响规划效果的一个因素。
可以根据无人机运输环境需要进行栅格化二维处理,黑色区域代表障碍物,如图1 所示,把无人机运行环境分成100个小格,并且分别指定好起点和终点。利用三维坐标系建立无人机运输环境,产生以A 点为中心的长方形区域,将其模拟为现实环境,如图2所示。

图1 规划环境二维栅格化示意
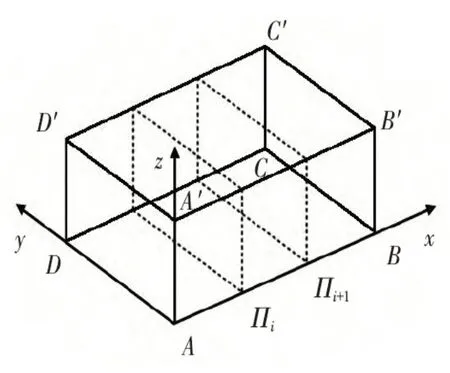
图2 规划环境三维栅格化示意
2 改进A*算法
2.1 传统A*算法原理
A*算法考虑将起始点到当前节点的实际路径耗散也作为遴选的条件,表达式为:

其中,()为路径规划起始点到中间点所付出的航程代价,()为中间点到最终点估计的航程代价。
实际代价函数()表达式为:

其中,、、分别为最小路径长度、最大航程、转弯角和俯仰角,详细叙述见文献[1]:、、为系数,且++= 1。
启发函数h(n)的选取影响A*算法的搜索策略,本文将欧氏距离、曼哈顿距离和others距离三者结合使用,提高启发函数的质量。
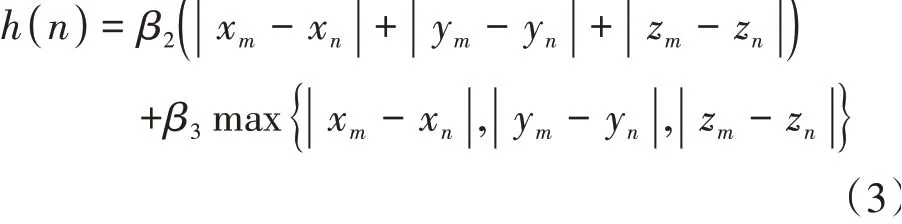
其中,、、分别是欧氏距离、曼哈顿距离others距离的权重系数,且++= 1。
2.2 改进A*算法
2.2.1 使用hash和堆减少每个栅格的计算量
具体来说,需要使用hash 表备份Open 表,通过优化Open 表,使得所选择的节点带有“可参照性”,而不是单单的直接从Open 表中取。如果Open 表在放入数据之前,我们就让它按照一定顺序,那么从Open 表中取数据时,这些数据就是具备顺序的,是有“可参照性的”。可以选择优先队列的方式。
2.2.2 双向搜索策略
双向搜索相当于有两个起始点,双向去搜索路径,最后相交于同一点。通过正反向搜索相互切换,如此交替往复运行,直到找到一条最优路径。
2.2.3 改进启发函数
动态衡量启发式为:

其中()>=1。把()变成了()*(),在搜索过程中,我们可以通过改变()来影响()对A*算法的影响。具体原理是在搜索初始阶段搜索速度较快,搜索末期速度较慢,倾向于搜索最优路径。可以推理出,()越大,越趋近于BFS 算法;而()越小,则相对趋近于Dijkstra算法。
2.2.4 路径平滑处理
通过平滑处理可以消除拐点、折角等现象,使飞行路径更加平滑,也更接近于真实飞行方式,可以采用B 样条法对初始路径进行优化处理。
3 算法流程
本文算法流程设计如图3所示。

图3 算法流程设计
步骤1:指定初始点和终点,创建OPEN 集与CLOSED 集,把两点开始放入OPEN集, 经过路径搜索出点并放入CLOSED集。
步骤2:判断是否为最佳路径点,若到达最优点,则把最优点放在CLOSED 集进行进一步的搜索,即执行步骤3,否则执行步骤4。
步骤3:确定搜索是否完成,所得路径即为最优无人机运输路径,否则以当前点为起始继续搜索。
步骤4:以步骤2 中最优节点为中心,向周围进行大范围搜索,不断更新最优点放入OPEN集,继续执行步骤2。
4 仿真分析
比较几种算法的模拟效果,并验证改进算法的优越性,进行仿真实验,指定起始点为(1,2,0),终点为(8,6,2),基础数据见表1。
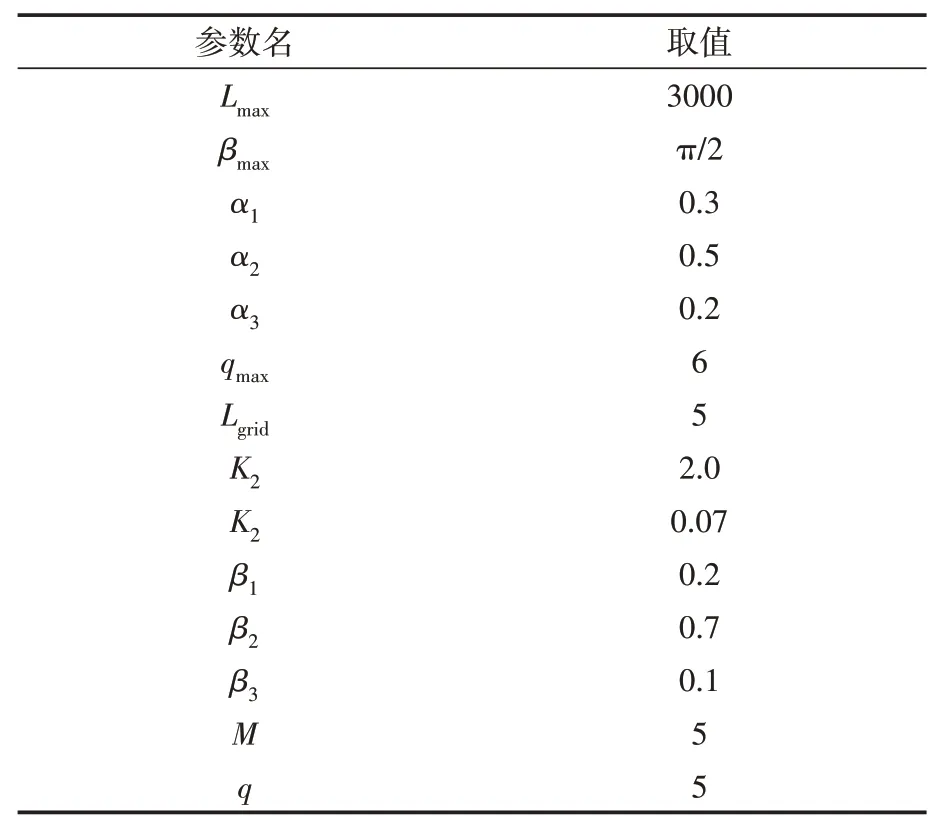
表1 参数取值
利用仿真平台,分别对A*算法以及改进的A*算法进行仿真,结果如图4所示。
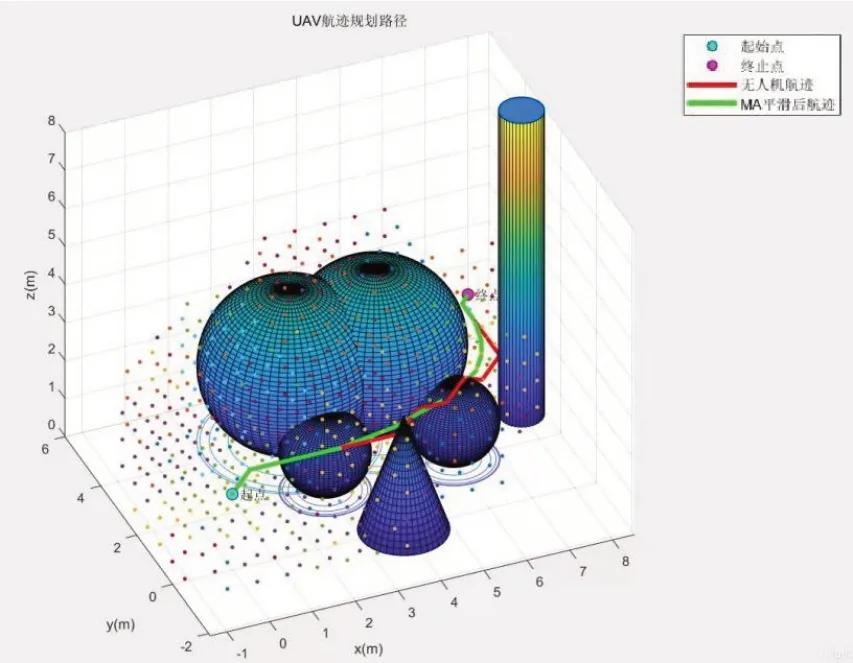
图4 A*算法和改进A*算法结果
从图4 可以看出,经过优化处理过的A*算法所计算的路径更短,也更加平滑,符合无人机现实运行情况。因此,本文使用的经过改进的A*算法更加优化了无人机运输路径。
为了增加对比,把RRT 算法的仿真结果也展现出来,如图5所示。
从图5 可以明显看到,此算法所求路径比A*算法要长。三种算法运算数据见表2。
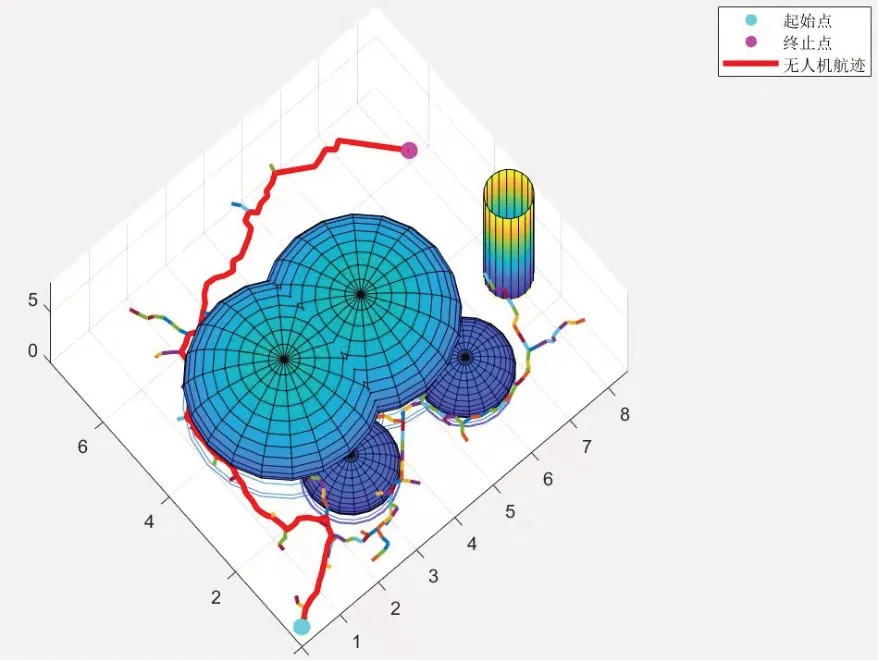
图5 RRT算法结果

表2 几种算法运算数据比较
从计算结果可以看出,A*算法可以更好地靠近最优路径,而RRT 算法迭代时间更短;经过优化的A*算法实现双向搜索之后,搜索效率也明显提升,搜索到的路径更加优化,本文改进的A*算法可以很好地解决物流无人机路径规划问题。
5 结语
本文利用栅格法建立物流无人机三维运行环境,比较分析A*算法和RRT 算法,针对两者存在的缺陷进行双向搜素、启发函数等的改进。改进后的A*算法模拟效果明显更好,而且运行时间更短,模拟出的飞行路径更加平滑,因此,改进后的A*算法能够很好地处理类似问题。
猜你喜欢
当代陕西(2022年4期)2022-04-19
科学与财富(2021年35期)2021-05-10
移动通信(2019年2期)2019-03-27
大科技·C版(2018年11期)2018-10-21
航运交易公报(2016年44期)2017-03-07
兵器知识(2016年11期)2016-11-03
世界博览(2016年4期)2016-03-16
航运交易公报(2015年42期)2015-12-02
航运交易公报(2015年40期)2015-11-30
中国信息化·学术版(2013年5期)2013-10-09