采用改进粒子群算法的含VSC-HVDC交直流系统优化潮流
2022-07-30 15:08姚铭艺
山东电力技术 2022年7期
余 爽,姚铭艺,张 祥,吕 力
(1.国网江苏省电力有限公司超高压分公司,江苏 南京 211100;2.河海大学能源与电气学院,江苏 南京 211100;3.国网江苏省电力有限公司南京供电分公司,江苏 南京 210000)
0 引言
随着国家“西电东送”以及“双碳战略”的推进,高压直流输电(High Voltage Direct Current,HVDC)[1-2]技术被越来越广泛地应用于远距离大容量输电、新能源并网等领域[3]。目前,直流输电工程的应用正逐步从常规半控型直流输电向柔性直流输电转型。电压源型换流器(Voltage Source Converter,VSC)作为一种新型换流器[4-5],可以独立、快速地控制系统的有功和无功功率,是支撑柔性直流输电技术工程应用的核心器件[6-8]。
动态最优潮流(Dynamic Optimal Power Flow,DOPF)计算是现代能量管理系统最重要的功能之一[9]。但随着目前VSC-HVDC 的投入运行,网架结构发生改变,传统的最优潮流(Optimal Power Flow,OPF)计算模块不再适用,因此需要研究新的含VSC-HVDC的交直流混联系统DOPF模型[10-13]。
DOPF 是非凸、非线性规划问题,维数较大、求解困难。目前应用较为广泛的求解方法主要有解析算法和智能算法两类。解析法计算速度快、占用内存少,鲁棒性较强。但对于考虑机组启停等因素,即系统中含有离散变量时,采用解析法求解将变得困难。人工智能算法的发展给电力系统DOPF 问题求解提供了新的思路[14],具有搜索能力强、适用于离散变量优化的优点。文献[15]采用双种群进化策略,分别利用粒子群优化算法和差分进化算法进行寻优迭代,研究了常规交流系统的OPF 问题。文献[16]采用基于模糊控制理论的自适应粒子群算法,研究了求解直流电网中的OPF问题。
针对VSC-HVDC 的接入会改变传统电力系统工作方式以及OPF 数学模型的情况,考虑系统网损多时段全局优化,建立含VSC-HVDC 的电力系统DOPF模型,并采用改进粒子群算法进行求解。
1 VSC-HVDC的基本原理和控制方式
1.1 基本原理
在双端VSC-HVDC系统中,整流侧和逆变侧的系统结构完全相同,且交流部分三相对称。因此以一侧换流站为例进行分析,简化后的电路结构如图1所示。
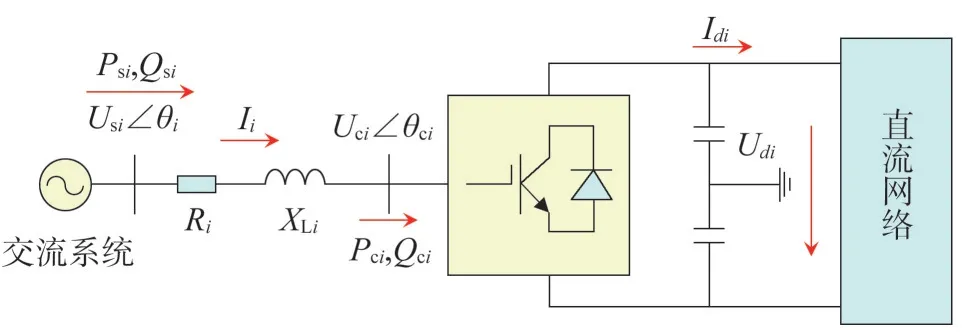
图1 单侧VSC单相结构
从图1 可以看出,在节点i处,VSC 电压为接入的交流系统节点的电压为jXLi为换流变压器阻抗,Ri为换流变压器电阻和损耗等效值,Psi、Qsi分别为从交流系统流入的有功、无功功率,Pci、Qci分别为流入VSC的有功、无功功率,流过换流变压器的电流为,方向假设如图1中所示,则有:
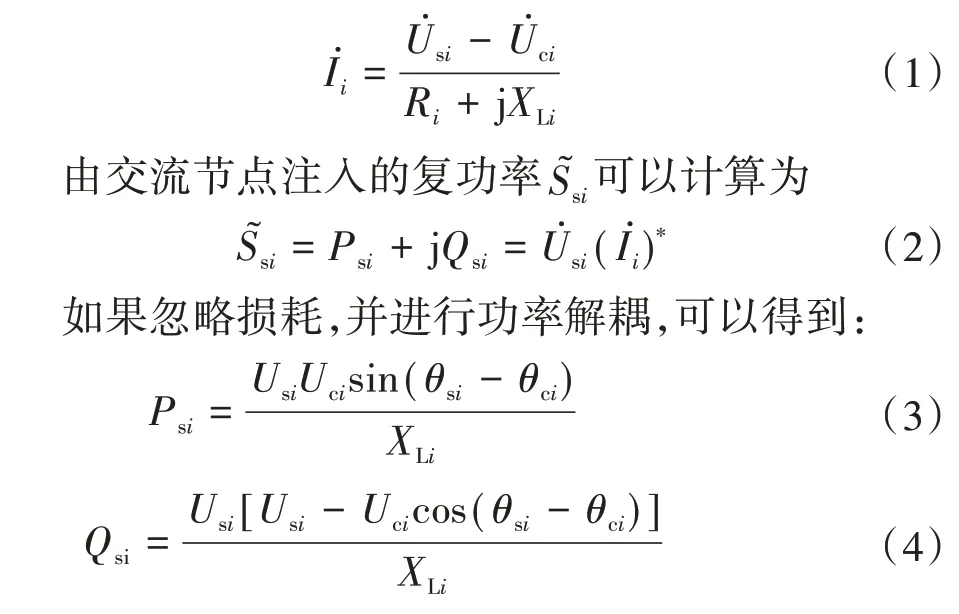
通过式(3)和式(4)可以分析VSC 的工作状态,即可以通过改变VSC 设备的电压相位进行来实现VSC工作状态的调整。
为方便分析和公式表达,令:δi=θsi-θci,Yi=则式(3)、式(4)可重新表达成如式(5)和式(6)的形式。

流入VSC的有功功率Pci、无功功率Qci表示为:

所述模型将内部损耗都等效为Ri,因此对于直流侧的有功功率Pdi应该与注入换流桥的有功功率Pci相等。

式中:Udi、Idi分别为直流系统对应节点的电压、电流。
VSC的电压相量的幅值采用式(10)求解。

式中:μ为直流系统电压的利用率;Mi为调制度。
1.2 控制方式
VSC 的控制策略主要有定有功功率、定直流电压、定直流电流、定无功功率、定交流电压五种控制方式。然而为了实现系统的稳定和功率的快速调节,双端VSC-HVDC 系统的其中一端控制方式必须为定电流控制。若直流电压是恒定的,则直流电流和注入VSC 的有功功率成正比关系,因此定有功功率控制即与定直流电流控制等效。从以上分析可以得出,VSC控制方式存在四种形式,即:
①定直流电压、定无功功率控制;
②定直流电压、定交流电压控制;
③定有功功率、定无功功率控制;
④定有功功率、定交流电压控制。
不同的控制方式将对含VSC-HVDC 的DOPF 优化模型中的VSC 变量值设定产生影响。因此在潮流优化过程中须选取贴合实际运行状况的控制方式组合。本文中的双端VSC-HVDC 可选的控制方式组合为:①+③、①+④、③+②、④+②,在本文中用控制方式一、二、三、四表示。
2 含VSC-HVDC的交直流混联系统DOPF模型
电力系统DOPF 问题是多时段的非线性规划问题,相比传统的单一断面的静态OPF,其标准数学模型可以归纳成式(11)和式(12)的形式。
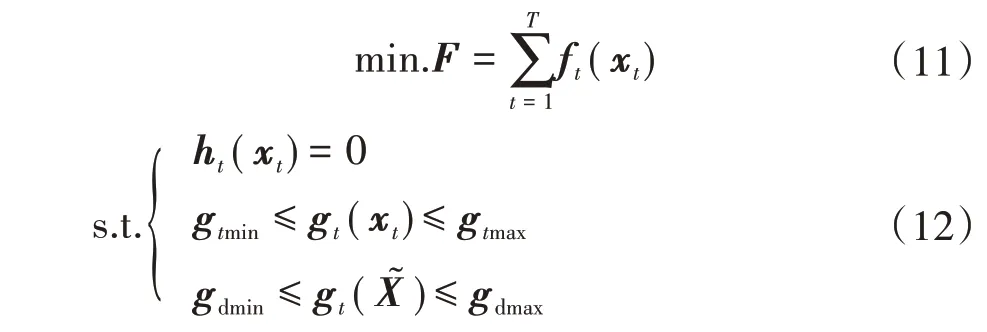
式中:xt为t时段的优化变量,主要包括可以调节的控制变量和表示电网参数的状态变量,设其维数为n;T为单小时时段数;ft(xt)为t时段的目标函数;ht(xt)∈R(m)为t时段的等式约束;gt(xt)∈R(r)为t时段的静态不等式约束,gtmax、gtmin分别为t时段的静态不等式约束的上限、下限;为时态间耦合的动态不等式约束为各个时段的变量的集合;gdmax、gdmin分别为动态不等式约束的上限、下限。
2.1 变量分析
含VSC-HVDC 的交直流系统DOPF 问题的待优化变量主要包括交流变量、VSC 变量以及直流变量,即xt=[xac,t,xvsc,t,xdc,t]=[PG,t,QG,t,θt,Ut,δt,Mt,Ps,t,Qs,t,Ud,t,Id,t]。其中:PG,t、QG,t为时段t的发电机出力向量;θt、Ut为时段t的不同节点的相角和幅值矩阵;δt、Mt为时段t的VSC的调制角和调制比矩阵;Ps,t、Qs,t为时段t的交流系统流入VSC 的功率矩阵;Ud,t、Id,t为时段t的直流节点电压和电流矩阵。
2.2 目标函数
多时段的系统网损最小函数如式(13)所示。

式中:PG,t为t时段第G台发电机输出的有功功率;Pi,t为t时段节点i的有功负荷;ng为接入系统的发电机数;T为总时段数。
2.3 等式约束
含VSC-HVDC 的交直流系统的DOPF 的等式约束方程包括各时段内的不连接VSC 的交流节点功率平衡方程、连接VSC 的交流节点功率平衡方程、VSC输入输出功率平衡方程、直流系统功率平衡方程以及直流网络电流平衡方程。
1)不连接VSC的交流节点功率平衡方程为
式中:ΔPi,t、ΔQi,t为t时段电网中不连接VSC 设备的纯交流节点的有功、无功功率不平衡量;PLi,t、QLi,t为t时段节点Li的有功、无功负荷;Ui,t、Uj,t为t时段交流节点电压幅值;θij为节点i、j间的电压相角差;Gij、B ij电纳则为导纳矩阵第i行和第j列的实部和虚部;j∈i表示与节点i相连的所有节点;系统的节点数为n。
2)连接VSC的交流节点功率平衡方程
式中:下标v表示连有VSC的交流节点。
3)VSC输入输出功率平衡方程为
式中:μi,t为t时段节点i(VSC)电压的利用率;δi,t=θsi,t-θci,t为t时段节点i的调制角;Mi,t为t时段节点i的调制比;Udi,t为t时段直流节点的电压,Yi=
4)直流系统功率平衡方程为
5)直流网络电流平衡方程为

式中:gdij为直流线路对应的电导;nd为直流节点个数。
2.4 不等式约束
含VSC-HVDC 的交直流混联系统DOPF 的不等式约束即为电网的安全类约束,包含静态不等式约束和动态不等式约束。
2.4.1 静态不等式约束
静态不等式约束又分为交流系统不等式约束和直流系统不等式约束。
1)交流系统不等式约束可以表示如式(19)—式(23)所示。
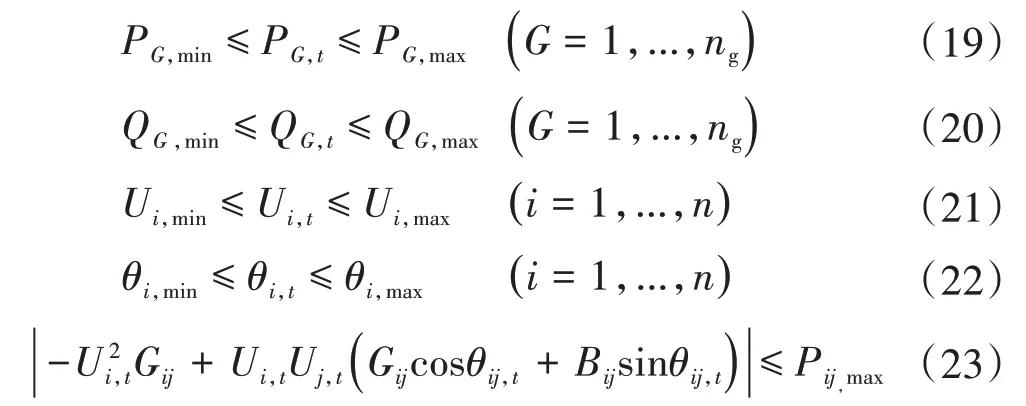
式中:PG,min、PG,max分别为发电机输出的有功功率下限、上限;QG,min、QG,max分别为发电机输出的无功功率下限、上限;Ui,min、Ui,max分别为节点电压幅值的下限、上限;θi,min、θi,max分别为节点i处电压相角的下限、上限;Pij,max为线路ij的有功传输限制。
2)直流系统的不等式约束主要是指VSC 的控制参数约束以及直流节点电压约束,可以表示为:
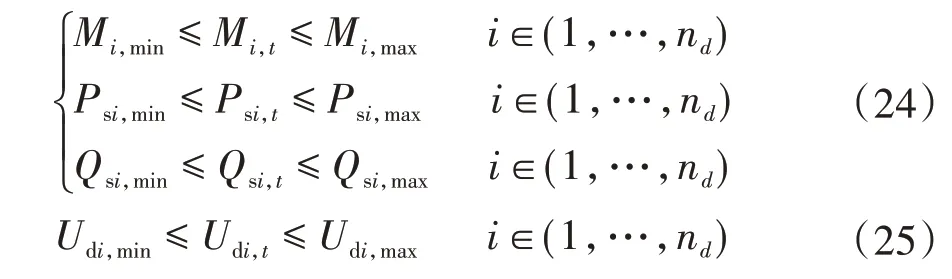
式中:Mi,max、Mi,min为系统调制比的上限、下限;Psi,max、Psi,min为交流系统流入VSC 的有功功率上限、下限;Qsi,max、Qsi,min为交流系统流入VSC 的无功功率上限、下限;Udi,max、Udi,min为直流节点电压上限、下限。
2.4.2 动态不等式约束
动态约束采用发电机爬坡约束,表示如下:

式中:Ru、Rd为第G台发电机升、降功率的最大爬坡值。
3 改进粒子群算法
3.1 基本原理
粒子群优化算法(Particle Swarm Optimization,PSO)[17]的基本原理是鸟群觅食行为的迭代演绎,从鸟群初始位置开始搜索目标解所在空间,最终搜索到最终“食物”位置。PSO算法的基本步骤如下:
1)鸟群中的每个粒子初始化赋值,包括粒子的位置x和速度y;
2)鸟群中每个粒子的适应值即所求问题的目标函数值的计算与评价,并保存每个粒子的目标函数信息和位置信息,各自保存在Pb和pe;比较所有Pb,将最优值的信息保存在Gb、pg;
3)粒子的位置和速度更新如式(28)和式(29)所示:
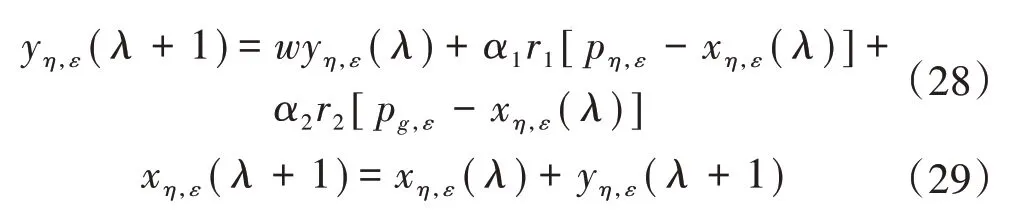
式中:w为惯性权重;yη,ε为第ε维搜索空间中第η个粒子的速度;α1和α2分别表征当前粒子向自身经验以及种群经验的学习情况,也即学习因子;r1、r2在0~1之间任意取值;pη,ε为每个粒子的经历过的位置信息最优值;pg,ε为种群的最优粒子的位置信息;xη,ε为第ε维搜索空间中第η个粒子的位置;λ为目前迭代的次数。
4)比较位置更新后的粒子对应目标函数值是否优于当前个体最优解、全局最优解,若优于已有解,更新Pb、Gb以及pe、pg;
5)判断是否达到收敛精度或者预先设定的寻优次数,若符合终止条件,结束算法寻优过程并给出最优解;反之,跳至步骤3)进行迭代寻优。
3.2 改进策略
1)自适应权重。
选择合适的学习步长可以通过改变惯性权重来实现,这样可以提升粒子的探索、开发能力。w依据当前粒子的寻优情况决定,主要改变方式如式(30)所示。
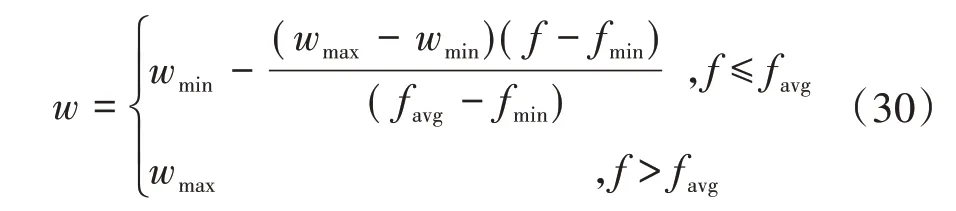
式中:wmax、wmin分别为权重的上限、下限;f为粒子当前目标函数值;favg、fmin为所有微粒的平均、最小目标值。
2)异步变化的学习因子。
异步变化的学习因子能够综合考虑算法的全局搜索能力与收敛性能。学习因子的变化为:
式中:α1,a、α2,a分别为α1和α2的初始值;α1,b、α2,b分别为α1和α2的迭代终值。
3.3 求解流程
采用改进粒子群算法求解DOPF 问题的流程如图2所示。
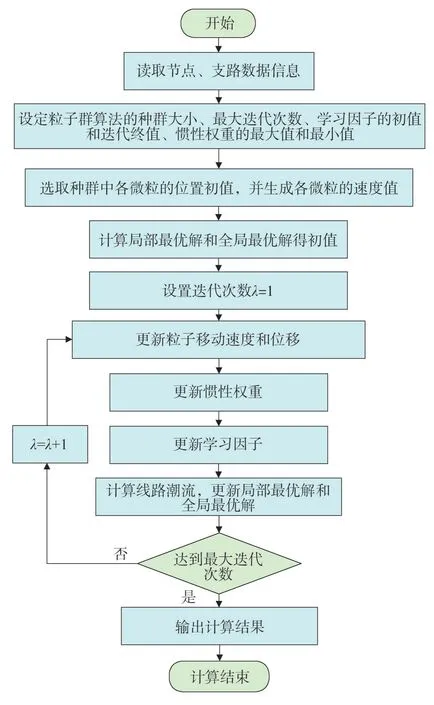
图2 基于改进粒子群算法的DOPF计算步骤
4 算例分析
4.1 系统测试数据和变量设置
采用Matpower软件包中提供的IEEE14 节点系统进行测试。对此进行交直流混联系统改造,在14 节点系统中的节点9 和节点10 接入VSC,同时将线路9—10 改造成直流线路,直流线路相关参数同原始交流线路。含VSC-HVDC的IEEE 14节点交直流混联系统网络拓扑如图3所示。
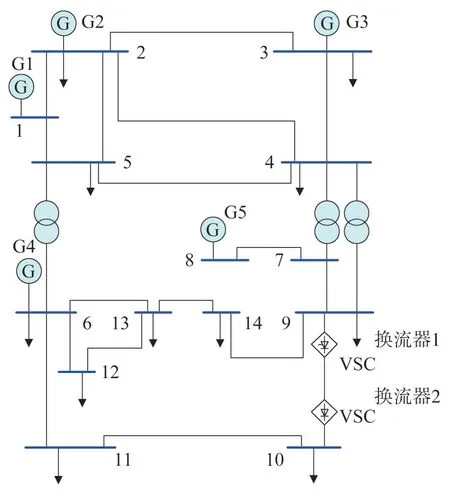
图3 含VSC-HVDC的IEEE14节点交直流混联系统
测试系统的基本参数如表1所示。
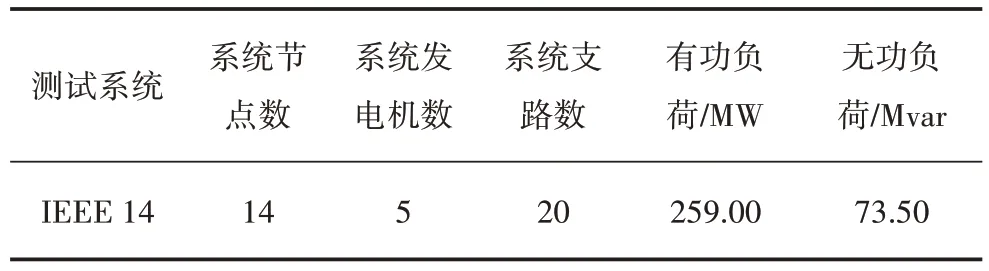
表1 测试系统基本参数
4.2 优化结果及分析
原始潮流计算的24 个时段的总网损为325.51 MW,网损较高。DOPF的计算结果如表2所示。
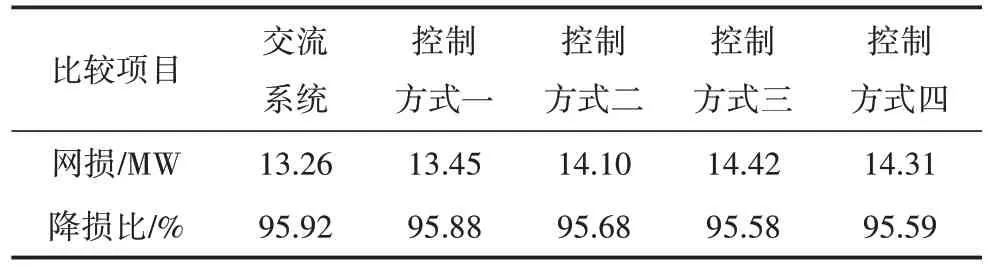
表2 IEEE 14节点系统DOPF优化结果
可以看出,针对不计及VSC-HVDC 的纯交流系统,以网损为优化目标,进行24 个断面的整体DOPF计算以后,系统的网损降低到13.26 MW,减损率达到了95.92%。进行交直流混联系统改造以后,相比原交流系统,各种控制方式的网损都有略微增加,这是因为此时要计及VSC的控制损耗。各控制方式下的网损在14 MW左右,降损比在95.50%左右,说明控制方式不会大幅改变系统潮流分布。以时段20(负荷高峰)为例进行分析,各节点的交流电压情况表3所示。
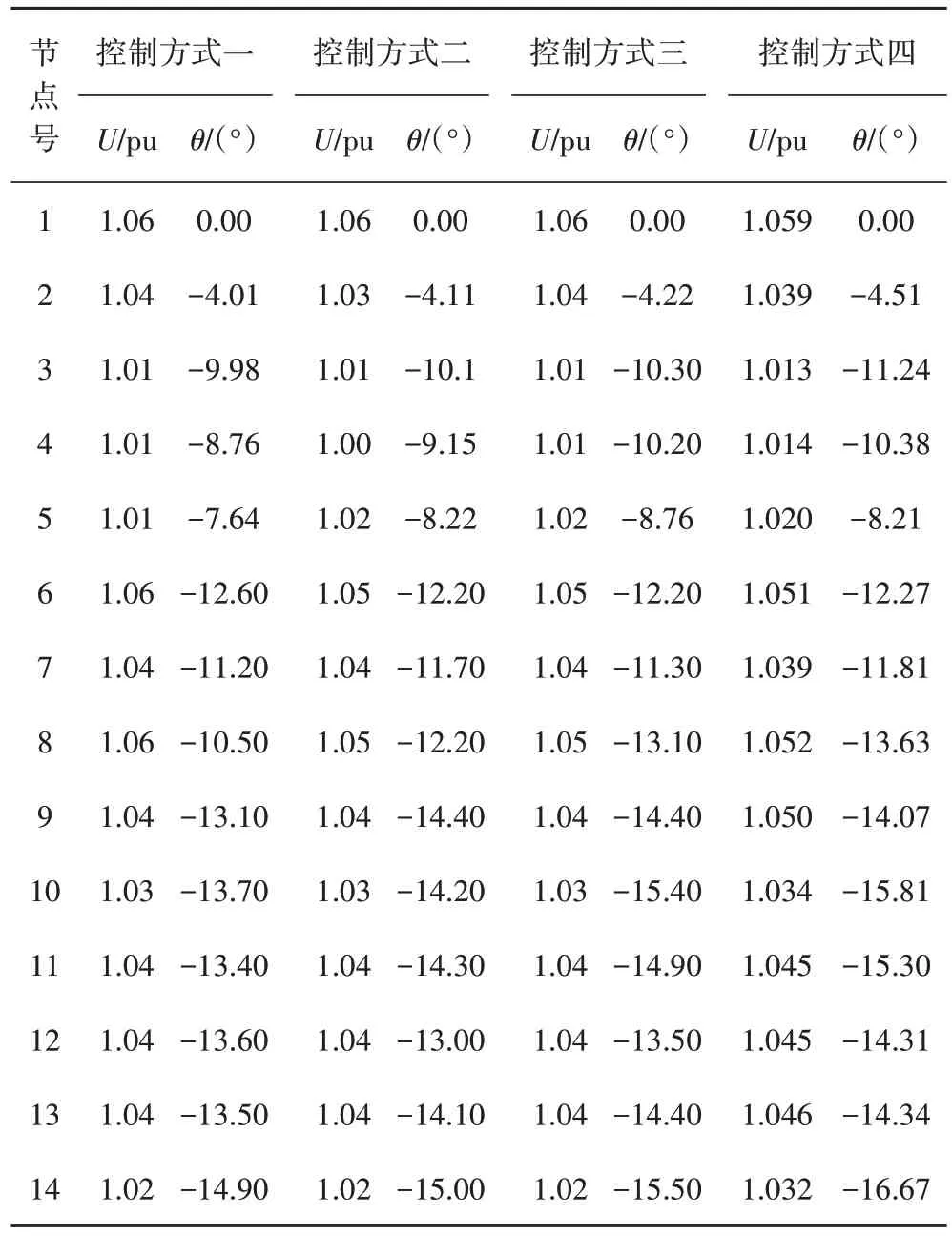
表3 时段20基于不同控制模式DOPF的交流电压情况
可以看出,由于优化模型具有电压约束作用,所有节点的电压幅值都被约束在0.94~1.06 pu 的范围内,体现了模型的稳定性。动态最优潮流由于具有强大的约束能力和优化能力,有效地解决了IEEE14 节点系统无功过剩,潮流计算结果电压幅值偏高等问题,有利于提高系统的电压水平。四种控制方式下的电压状态较接近,说明了控制方式的改变(对应控制值依据原始交流潮流)不会大幅改变电网潮流状态。
各控制方式的直流变量情况如表4 所示,可以看出,基于不同控制模式的DOPF计算得到的各VSC装置的直流系统参数变化不大,这是因为DOPF的潮流控制变量的整定值都是根据原始的交流潮流的状态而设定的,而其原始的交流潮流本身就具有相近性。
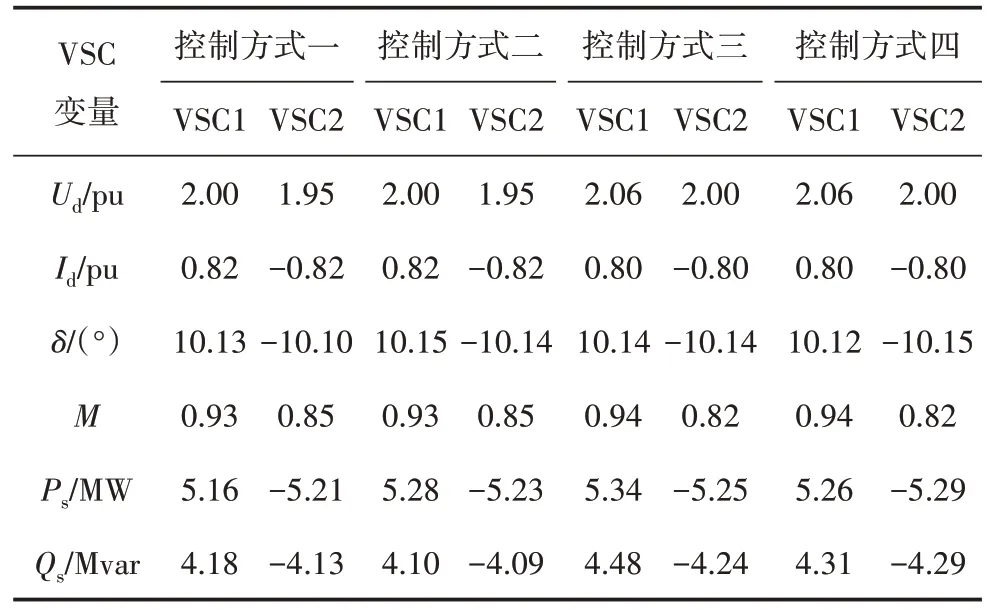
表4 时段20基于不同控制模式DOPF的直流变量情况
为了进一步分析机组爬坡对多时段潮流优化结果的影响,以IEEE14 节点系统为例进行不同爬坡优化测试,表5 分别给出基于不同控制模式的含VSCHVDC 的交直流混联系统的DOPF 计算在不同机组爬坡约束下的运行情况。
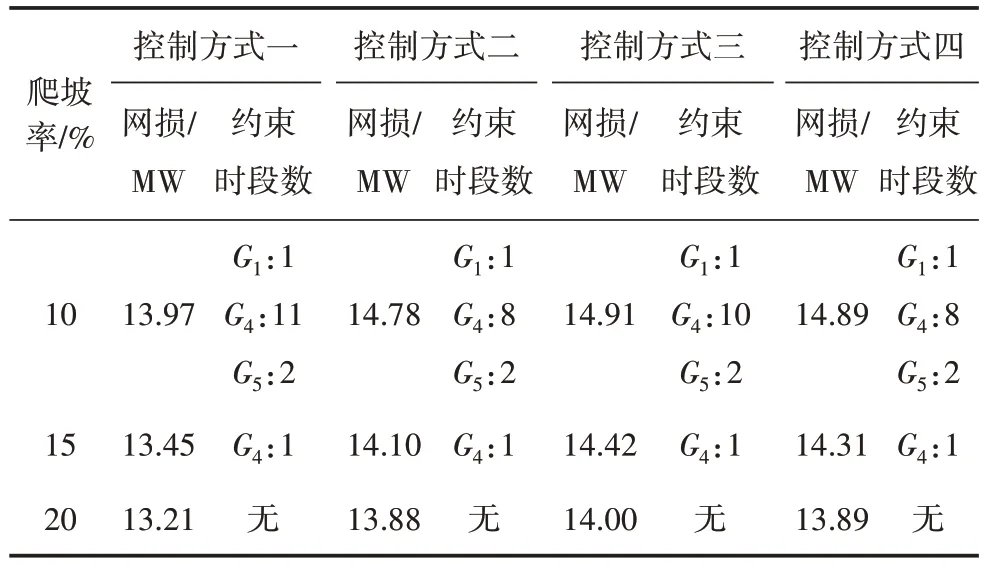
表5 不同控制方式下在不同爬坡约束下DOPF的优化结果
从表5可以看出,随着发电机爬坡约束的不断放宽,约束时段数不断减少,网损成降低趋势。这是因为爬坡约束变小,使得对应的动态约束条件变得严格,问题的可行域和算法的寻优空间变小,从而目标函数变大;而当爬坡约束被放宽到足够大时,此时的动态约束不起作用,则对应问题的可行域和算法的寻优空间变大,因此可以获得更优的解。VSC的控制模式不同,会对优化网损和爬坡约束时段数产生一定的影响。
5 结语
针对VSC-HVDC 的接入改变了传统电力系统的网架结构以及最优潮流模型的问题,文章提出了采用改进粒子群算法的VSC-HVDC 潮流计算方法。分析表明:
1)建立的含VSC-HVDC 交直流混联系统DOPF模型具有较好的降损和变量约束能力。
2)VSC 控制方式的改变不会大幅改变系统潮流分布、直流系统参数及爬坡约束结果。
3)自适应权重和异步变化的学习因子提高了PSO 算法的搜索能力和收敛性能,为求解DOPF 潮流模型提供了一种有效的思路。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
宁夏电力(2022年1期)2022-04-29
中国生殖健康(2019年8期)2019-01-07
综艺报(2018年17期)2018-09-14
电子制作(2018年8期)2018-06-26
小学阅读指南·低年级版(2017年1期)2017-03-13
海峡科技与产业(2016年3期)2016-05-17
人生十六七(2015年6期)2015-02-28
计算机辅助工程(2012年5期)2012-11-21