航道适航性分析模型设计与应用
2022-07-29 04:02杨必成翁佳静王山东
水运工程 2022年7期
杨必成,翁佳静,王山东
(河海大学地球科学与工程学院,江苏 南京 211100)
航运安全体系建设是我国航运事业发展的根本保障,而航道的适航性分析是其重要组成部分。Kozerska[1]从水下自然要素以及水上运输参数(如桥梁等)两个方面对可通航水域进行探讨研究;Kantarzhi等[2]应用ARTEMIS模型研究波浪条件对适航区域的影响;杨保岑等[3]对ArcGIS进行二次开发,利用数学模型动态计算可通航区域。随着三维可视化分析技术的飞速发展,数字航道相较于普通的二维电子航道图,其丰富的三维信息使得航道的适航性分析更加立体、直观[4]。本文以京杭运河的三维航道为研究对象,构建航道适航性分析模型,为船舶在航道中的安全行驶提供参考。
1 技术路线
利用水深点数据及边界提取技术构建航道水下三维地形;依据各航道要素的参考规范构建航道物标以及船舶的三维模型;依据AIS定位数据以及船舶型号参数构建船舶的三维航迹带模型;将三者进行布尔空间运算构建船舶的可通航区域模型,引入船舶碰撞危险度参数,构建完整的适航性分析模型。在模拟试验中依据该模型判断当前船舶行驶路线是否安全,并依此实施具体的避碰决策。技术路线见图1。

图1 技术路线
2 空间要素的三维建模
2.1 通航要素分析
航道通航影响因素主要包括航道水深、航道宽度、航道曲率半径、净空尺度[5]。而这些影响因素的具体分析需要依托实地的三维航道地形信息,本文以京杭运河水深点数据为源数据,依据水深的定义[6]对其高程信息进行换算,采取双线性多项式内插法加密水深点,最后利用预处理后数据构建水下地形不规则三角网模型,效果见图2。

图2 三维水下地形模型
由于航道边界水位随季节变更,需获取航道模型的边界线作为后续适航性分析中的航道宽度依据,采用广度优先算法[7]提取格网模型的边缘点。提取效果见图3。

图3 航道边缘提取效果
2.2 航道要素三维建模
利用外部链接CAD数据图纸对诸多航道要素进行三维建模,流程见图4,成果见图5。

图4 航道要素建模流程

图5 船闸模型
2.3 三维航迹带参数化建模
AIS技术是一种船舶定位技术,通过对卫星传回的信息进行解析获取船舶的历史迹点,依据这些数据信息对船舶的历史轨迹进行拟合,并统计其航迹带宽度以及通航水深信息作为三维航迹带建模参数。本文采用最小二乘法[8]进行轨迹点拟合,轨迹点的拟合效果与最小二乘的参数设置有关,故以整体方差的统计值作为调优依据,迭代获取最优的参数个数估计。图6b)的拟合效果优于图6a)。

图6 最小二乘拟合
而在流速、风速等因素的影响下船舶在行驶过程中的轨迹线通常为曲线,船舶航迹带宽度由船舶的航迹安全缓冲带的偏移量、船舶本身的占用空间相加所得[9],见图7。

图7 航迹带宽度
依据JTS 166—2020《海港总平面设计规范》[10],可通过式(1)计算航迹带宽度A:
A=n(Lsinγ+B)
(1)
式中:L为设计船长;B为设计船宽;n为船舶漂移倍数;γ为风、流压差角。见表1。

表1 船舶漂移倍数
船体下沉量D0可由式(2)通航水深计算公式[11]获得:
D0=T+Z0+Z1+Z2+Z3
(2)
式中:T为满载吃水;Z0为船体下沉量;Z1为最小富余深度;Z2为波浪富余深度;Z3为船舶纵倾富余深度。
利用Huuska公式[12]计算船舶下沉量Z0:
(3)
(4)
通过对9种实际船舶的航迹点进行拟合,获取实测的航迹带数据,与式(1)计算所得的航迹带宽值进行比较,发现实测拟合的内容和规范公式计算的结果基本一致。可将规范公式计算所得的航迹带宽应用于后续的航迹带建模。

图8 航迹带对比
本文以宝航789的船舶参数为试验对象,构建三维航迹带。为了提高航迹带的拟合建模效果,以航迹线中的转向点为依据进行分段建模。最终效果见图9。
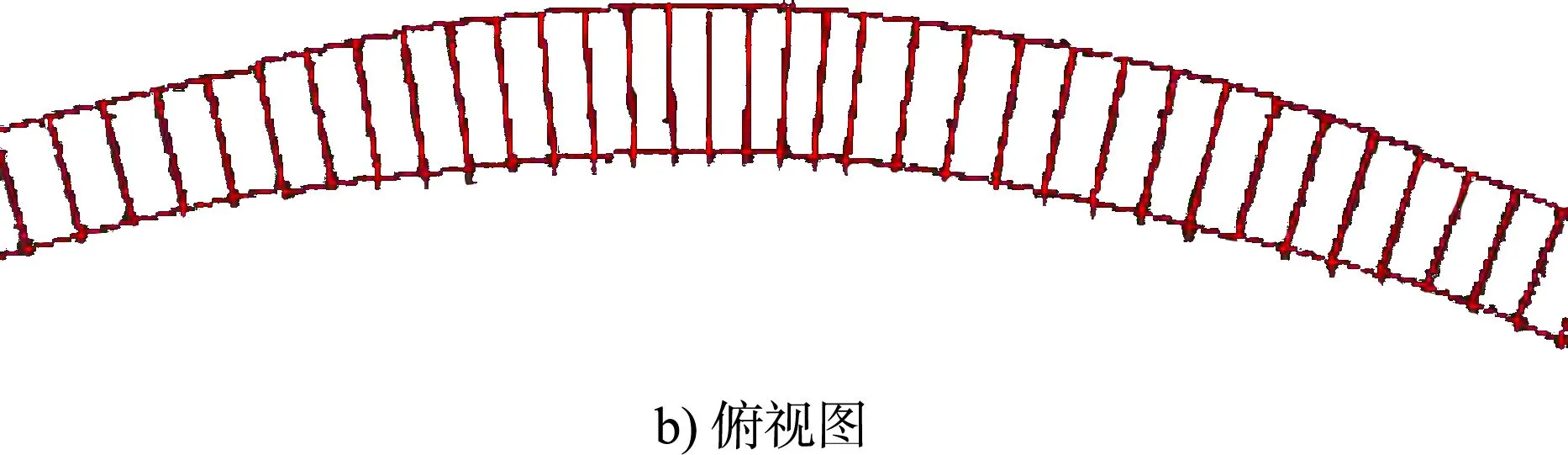


图9 航迹带
2.4 可通航区域建模
可通航区域是一个封闭式空间,在这个空间内两侧的等深线、净空线均应满足通航需求,将航道要素模型与航迹带模型进行布尔空间运算[13],求出安全的航行范围。布尔运算规则见图10。

图10 布尔运算规则
将空间航迹带模型与桥梁空间体作为运算的参数,算法流程见图11。

图11 三维航迹带模型与桥梁空间体布尔运算流程
依据求出的空间运算结果构建航道的适航水域模型,主要分为3种情况:天然水域(指水域开阔、无水工设施等建筑物的航段)、设有桥梁的航段、存在临水建筑的航段(港区航段)。
1)对于顺直天然水域进行适航性建模只需考虑水位变化,利用变化的水位值更新航道三维水下地形并与船舶的航迹带求差,若是弯曲航道可采用切角法加宽航道[14]。
2)对于设有桥梁的航段进行适航性建模,需要根据其桥梁建筑物的空间包围盒大小构造分层次的八叉树空间包围盒。若是拱桥则还需将包围盒和空洞模型进行求差运算,最后再将桥梁模型与航迹带模型求差分析。
3)对于港区航段进行安全水域建模,由于停泊水域为船舶提供停靠作业的空间,但其空间内船舶的行为可能影响相邻航道中船舶的行驶空间,故通过将停泊水域的空间包围盒与航道的适航空间进行布尔差运算,即可获得港区内适宜的运动空间。
3 适航空间应用分析
3.1 船舶避碰参数计算
在确定了整个水域的适航空间之后,可计算船舶会遇的CRI值(碰撞危险度参数)[15-16],这是一种评判船舶碰撞危险度的度量值,其范围为0~1。通常还可以从时间空间两个方面将碰撞危险度进行划分,可划分为时间碰撞危险度(time collision risk,TCR)和空间碰撞危险度(space collision risk,SCR)。
空间碰撞危险度一般通过比较最近相遇距离DCPA、绝对安全会遇距离d1、双方安全通过的最小距离d2的大小,代入不同的式子即可求得空间碰撞危险度的隶属度值γDCPA,可将其作为空间碰撞危险度的参考值。

(5)
其中d1、d2的计算可参考文献[17],计算公式为:
(6)
d1=1.5ρ(θT)
(7)
d2=2d1
(8)
式中:θT为两船相对方位角。
时间碰撞危险度指的一种时间紧急程度的度量值,表示船舶为避免碰撞应急响应的时间需求。
(9)
其中:
(10)
(11)
式中:t1为船只采取避让行为的时间;t2为船只到障碍物所需时间;D1为遇见障碍物采取避让行为的最短反应时间;D2为遇见障碍物采取避让行为的最长反应时间;vR为船舶航行速度。
CRI值可通过上述求得的两个危险度数值计算得到:
γ=γDCPA⊕γTCPA
(12)
其中,⊕为合成算子,含义如下:γDCPA=0,γ=0;γDCPA≠0,γTCPA=0,γ=0;γDCPA≠0,γTCPA≠0,γ=0.5γDCPA+0.5γTCPA。
上述的避碰参数计算均需在已确定的适航空间内进行,若超出范围则危险度为1,应采取相应的避碰决策。决策分析的主要流程见图12。
3.2 路线避碰决策

图12 避险决策
当船舶收到预警信息,将执行协调避让机制,依据实际情况,规划合理路线,本文以鲁济宁货7828和宝航789为模拟试验对象,模拟场景可分为追越局面、相向而行、交叉局面3种。
3.2.1追越局面
宝航789行驶速度大于鲁济宁货7828,且航向几乎一致,当CRI>0.4时,通过采取相应的措施,避免船舶碰撞。具体决策内容为:鲁济宁货7828保持原速度不变,宝航789左侧超越,直到CRI值<0.4,在超越之前判断在适航空间中是否存在合适的超越位置,该位置需与鲁济宁货7828保持一定的安全距离。见图13。

图13 追越局面
3.2.2相向而行
同样在两船相向而行时,设置0.4为CRI阈值。通过CRI值分析当前船舶行驶安全性,当其大于阈值时,上行船只鲁济宁货7828作出避让,避让的横向安全距离应为宝航789航迹带的1.5倍,直到危险解除(即CRI<0.4)。见图14。
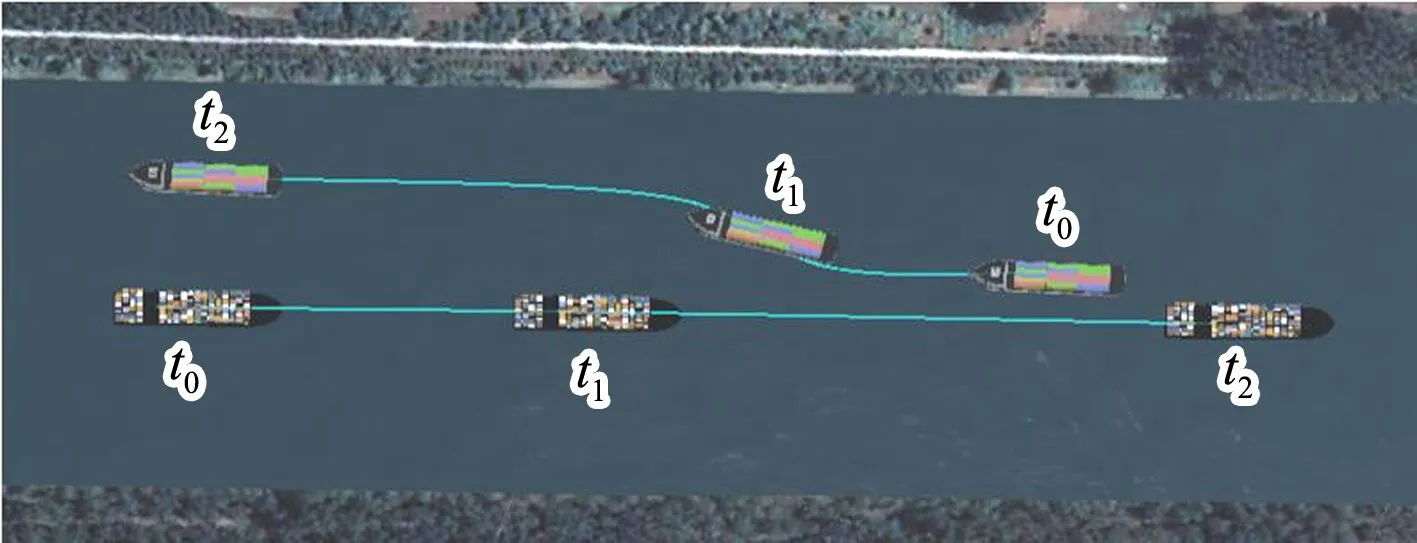
图14 相向而行
3.2.3交叉局面
当鲁济宁货7828与宝航789的行驶路线相互交叉时,试验中作出的具体决策为:向右横向行驶船只鲁济宁货7828应保持原航线不变,上行船只宝航789在CRI值大于0.4时应当减速让行,避让直至CRI值小于0.4。见图15。

图15 交叉局面
4 平台应用
将上述研究内容应用于实际开发,开发平台为Unity3D,应用研究区域为京杭大运河淮阴船闸至淮安船闸航段,基于航务管理处的水情信息进行统计分析,根据季节年份的变化更新适航区域,获取通航船舶的船型数据桥梁数据,分析大型内河港口与助航设施情况,将航道地形、航道影像、航道设施建筑物等要素进行三维可视化,并设计航线查询、模拟航行、绘制航迹带、显示适航区域、预警与决策等诸多功能见图16。为验证系统的可靠性,采用模拟试验的形式。试验证明,船舶可依据适航性分析模型做出合理有效的预警与避险。

图16 航道适航性分析模型诸多功能
5 结论
1)航道适航性分析模型的空间基础可采用三维航道技术构建,在该项技术的引入过程中可考虑多源数据的信息提取与融合。
2)可以在可通航区域引入CRI值作为船舶避险依据。进而构建适航性分析模型。模拟试验证明该适航性分析模型符合可靠性及稳定性的要求。
猜你喜欢
成都信息工程大学学报(2022年4期)2022-11-18
中国临床医学影像杂志(2022年5期)2022-07-26
四川精神卫生(2021年3期)2021-07-20
计算机应用与软件(2021年6期)2021-06-21
航空工程进展(2019年5期)2019-11-05
中国肿瘤临床(2019年12期)2019-09-02
舰船科学技术(2017年7期)2017-08-02
大社会(2016年5期)2016-05-04
燕山大学学报(2015年4期)2015-12-25
汽车零部件(2014年2期)2014-03-11