
汽车制动舒适性控制研究综述
2022-07-28 06:55徐哲刘豪党威胡趁义龙永文
科学技术与工程 2022年17期
徐哲, 刘豪*, 党威, 胡趁义, 龙永文
(1.重庆理工大学车辆工程学院, 重庆 400054; 2.东风柳州汽车有限公司, 柳州 545000)
随着智能汽车技术的发展,汽车在纵向上已经可以由自动驾驶系统进行控制,人们开始对纵向舒适性能进行评价。车辆制动和加速过程中的不适成为评价自动驾驶性能的一个重要方面。从控制机构来说,研究人员从悬架、制动等系统入手,建立了多种研究乘坐舒适性的模型。从研究方法看,具有频域分析、减速度曲线规划、非等利用附着、微分平坦等方法。对于自动驾驶车辆来说,分析了混合交通背景下的乘坐舒适性以及跟车模型等。在其他乘用交通工具中,如轮毂电机、电梯、地铁等,也有一定的乘坐舒适性研究,其成果也可在其他车辆中作为参考。目前量产的车型中已经有了舒适停车功能(comfort stop,CST),例如比亚迪的“汉”。各厂商,如博世、伯特利、联创都在积极地开发这一功能。从理论上研究乘坐舒适性,可以为功能的开发提供坚实的基础。
目前乘坐舒适性相关研究集中于方法研究、效果影响以及性能优化等方面,较少系统归纳与总结乘坐舒适性的研究现状与发展趋势。鉴于此,现重点就影响因素、控制结构、研究方法等方面对乘坐舒适性问题进行综述和对比分析,并在此基础上展望乘坐舒适性的发展方向。
1 制动舒适性概念及其指标
纵观文献,由于纵向和横向控制均由驾驶员实施,其效果主要取决于驾驶员操纵,传统的乘坐舒适性在汽车性能评价中主要考虑的是垂向舒适性。在自动驾驶时代,该操纵通过自动控制实现,因此纵向的舒适性能逐渐受到关注[1-2]。对于纵向舒适性的定义, Bellem等[3]理解为通过制动系统消除乘员晕车的感受,即制动舒适性的概念,在制动过程中由于减速度的变化会使车身和乘员的姿态变化,这种突兀的变化会使乘员感到恶心,最终破坏乘坐舒适性。一些研究明确提到了制动时减速行为的重要性[4-7]。也有研究以数据的方式来量化乘坐舒适性的指标,Du等[8]通过安装在车内的多个加速度计来评估乘坐舒适性。功率谱密度分析和1/3倍频程带滤波被用于导出加权均方根加速度作为舒适度的评估指标。Koji等[7]进行了制动试验,并采访了试验人员,以主观评价的方式确定了不同的加速度曲线对不同的人的影响。如图1所示,体现了不同加速度/冲击度(加速度的时间变化率)水平的可接受性。
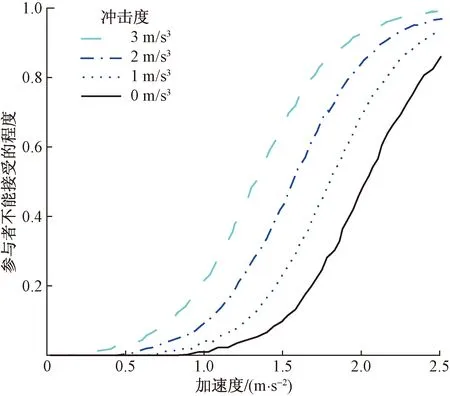
图1 不同冲击度的可接受性[7]Fig.1 Acceptability of different jerk degrees[7]
ISO 2631-1标准(表1)将舒适性与作用在人体上的总均方根加速度联系起来,表达式为

(1)
式(1)中:awx、awy、awz分别为均方根值(root mean square,RMS)在x、y、z轴上的加速度;kx、ky、kz分别为乘法因子。对于坐着的人,kx=ky=1.4,kz=1。可以看到x轴和y轴这两个水平轴向的轴加权系数都要比z轴的轴加权系数大。也就是说,人体对x轴和y轴的振动会更加敏感。对于制动过程,主要研究车辆x轴振动对汽车平顺性的影响。对于x-y平面上的运动,awz=0。使x轴和y轴分别与轨迹的纵向和横向对齐。
由表1和式(1),对于“没有不舒适”的加速度,纵向和横向的加速度均方根值必须小于0.35 m/s3这是以包括纵向和横向的加速度均方根值提出的要求,而文献[10]提出乘员感到舒适的非紧急制动减速度应不大于0.15g(g为重力加速度)以及冲击度应不大于0.3 m/s3。无论用什么方法提高制动舒适性,最后的指标应小于此值。
如图2所示,根据车身及乘员的不同响应,制动过程可分为3个阶段:制动初期、制动中期和制动后期。
(1)制动初期。制动踏板被踩下后,车辆开始制动。这是减速度建立的过程。而乘员的身体感受到外加的减速度,会由于惯性力从原来的坐姿状态发生身体前倾。
(2)制动中期。在制动过程中,由于减速度一直存在,乘员会一直受到相应的惯性力。通常情况下,这个惯性力会被其他外力平衡,而在制动中期乘员会基本保持身体前倾的状态。
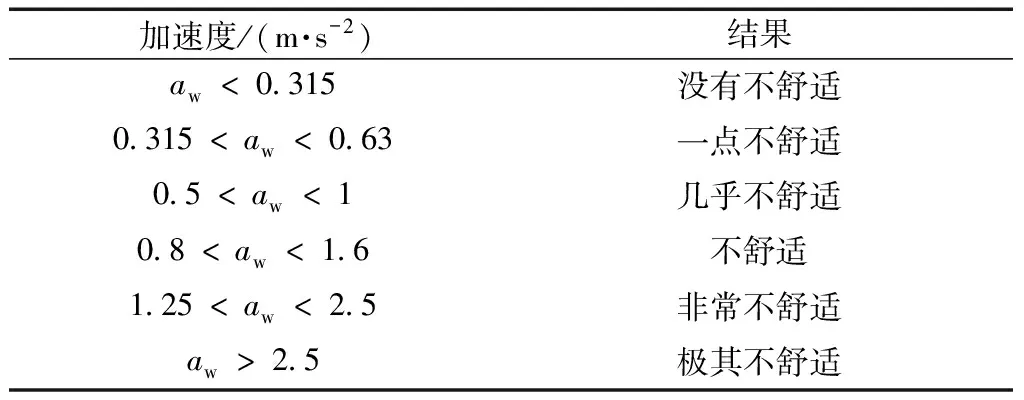
表1 ISO 2631-1标准[9]
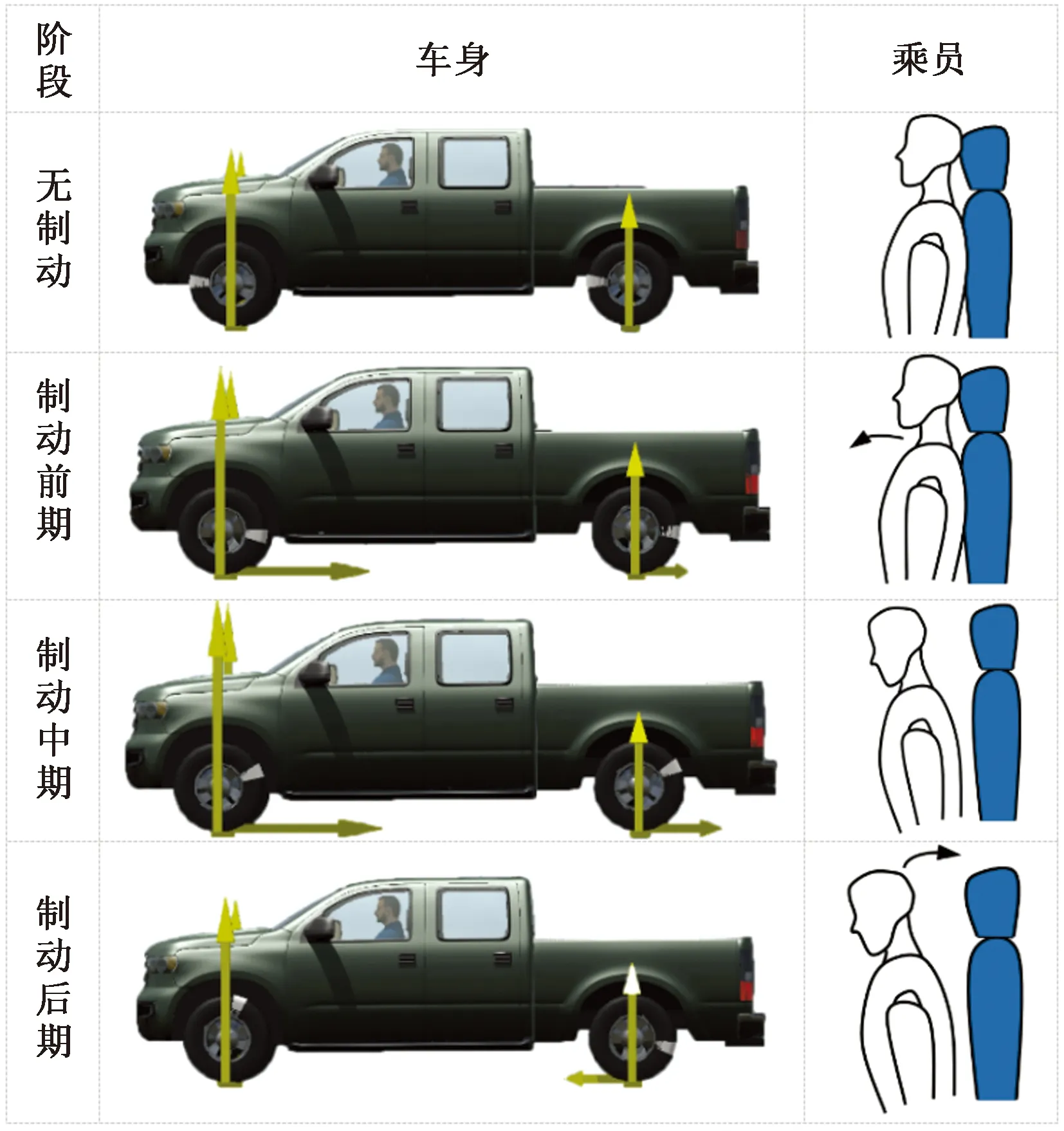
图2 制动时人体姿态变化[11]Fig.2 Body posture changes during braking[11]
(3)制动后期。这个阶段是指车辆从接近停止到车轮与地面间没有相对运动的过程。此时,车辆实际上已经停止,但是车身会在悬架和轮胎的作用下有一定的“回弹”和振动,从而使得乘员的身体也会发生相应的“回弹”,从身体前倾状态向后运动恢复。
人们的前庭系统无法感受速度的变化,却能感受加速度的变化,制动后期姿态的变化极易使人晕车。所以制动舒适性研究的重心应放在制动后期上。
2 模型的建立
车辆纵向模型是分析车辆纵向加速或制动性能的重要模型。对于制动舒适性来说,它属于车辆纵向控制的范畴。文献[12]建立了6自由度的车辆纵向动力学模型。通过研究地面车辆动力学和动力系统模型详细推导并验证了用于研究车辆纵向动力学行为的整车模型。
文献[11, 13-17]建立了包含悬架的纵向动力学模型。图3为带有悬架的纵向动力学模型,其中G为车辆俯仰中心。
图3 车辆纵向动力学模型[17]Fig.3 Longitudinal vehicle dynamic model[17]
由车辆纵向动力方程得

(2)
式(2)中:X为制动过程中车辆的行驶距离;M为车辆的总质量;uR和uF分别为前轮和后轮的轮胎制动力系数;FZR和FZF分别为前轮和后轮的垂直载荷。FZR和FZF可分别由式(3)、式(4)求得,即

(4)
式中:MR和MF分别为后悬架和前悬架的扭矩;m为非簧载质量;LOF和LOR分别为前后接触点到悬挂中心的纵向距离;HOF和HOR分别为前后接触点到悬挂中心的垂直距离;MR和MF分别可由式(5)、式(6)求得,即

(6)
式中:a和b分别为质心到前轴和后轴的距离;Mc为车辆的簧载质量;kR和kF分别为后悬架和前悬架的扭转刚度;cR和cF分别为后悬架和前悬架的阻尼系数;θR和θF分别为后悬架和前悬架的变化角度,分别可由式(7)~式(10)求得,即

(10)
式中:ZF和ZR分别为前后悬架垂直方向上的位移,可由式(11)~式(14)求得,即
ZR=(tanθ)b+Z
(11)

(12)
ZF=-(tanθ)a+Z
(13)

(14)
要更深层次地剖析乘坐舒适性的问题,还必须包括轮胎模型[18],MF(magic formula)模型是一个半经验轮胎模型,在仿真中能够较好地模拟轮胎的非线性。但MF模型描述的是轮胎的准静态特性。车辆在制动过程的临界状态时需要考虑到轮胎的瞬态过程,可用LuGre模型来描述轮胎的瞬态特性[19]。
3 不同的控制结构对乘坐舒适性的影响
3.1 从悬架角度考虑
在制动过程中造成不舒适的原因除了减速度和冲击度外,还有车辆大幅度的俯仰运动,而悬架与车辆俯仰运动息息相关[20-22]。对于乘用车而言,行驶中产生的振动频率在0.25~25 Hz[23],对于赛车而言,这个数值稍高。在垂直方向上,轮胎的弹性和质量相对较低,可以“吸收”较高频率的振动。然而,对于振动频率低于3 Hz的情况,轮胎的作用就很小,这时候可以认为轮胎是刚性的。因此,吸收低频率振动的任务就落到了车辆的悬架上。
从20世纪开始已经开发了各种类型的弹簧、阻尼器和在各方向上都具有一定灵活性的悬架。最简单也是最常见的悬架类型是被动悬架,因为不需要外部能源。而被动悬架不能直接控制车辆的俯仰。随着现代控制理论和电气技术的发展,在悬架上可通过致动器产生在传统被动悬架上不可能产生的力或运动,以抵消不必要的车身运动。
Campos等[24]提出一种电子控制方案,与简单的被动悬架相比,改善了垂向振动和俯仰控制中的悬架性能。Zhang等[25]通过对悬挂变形和车辆俯仰、起伏及侧倾运动的控制实现车辆的姿态调节,设计了具有姿态和舒适性控制的主动悬架。Fauzi等[26]为了研究车辆纵向动力学建立并验证了一个包含悬架和轮胎的14自由度模型,并针对悬架设计了抗俯仰的比例-积分-微分(proportion-integration-differentiation,PID)算法,所设计的算法在加速和制动时都有良好的表现。
Pavlov[27]模拟了卡车在铁路道口前制动的工况,通过半主动悬架控制,减小制动俯仰角。控制原理如图4所示,控制器接收来自位移传感器的信号,并由减震器产生控制信号。
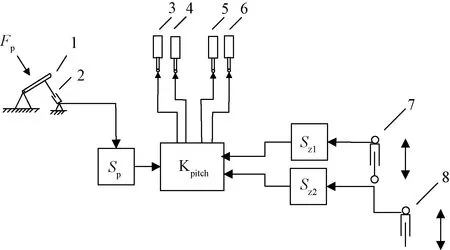
Fp为踏板力;Kpitch为控制器;Sp、Sz1和Sz2为传感器信号;1为制动踏板;2为踏板位移传感器;3、4为前减震器;5、6为后减震器;7为前轴位移传感器;8为后轴位移传感器图4 俯仰角控制系统原理图[27]Fig.4 Schematic diagram of pitch angle control system[27]
上述的控制策略都是基于主动或者半主动悬架,由于成本昂贵、技术困难等原因还没在车辆上大面积的普及。Wang等[28]从被动悬架的结构出发,分析了紧急制动过程中前后悬架摆臂瞬心的变化特征,汽车的悬架受制动力和垂向力的共同作用。对于俯仰特性,通过俯仰角和制动减速度的关系以及制动减速度与制动减速度变化率来综合评价。通过合理匹配前后悬架的纵向倾斜平衡特性,可以拥有理想的制动俯仰特性。如图5所示是完整制动过程中的速度、减速度、俯仰角的变化。

图5 制动时各参数的变化[28]Fig.5 The variation of parameters during braking[28]
利用4个过程参数来分析制动时俯仰特性的变化趋势[28],分别为前悬架的防俯冲控制(Kεf)、后悬架的防俯冲控制(Kεr)、车辆轴距的变化(DL)、重心在垂直方向的位移(Z),公式为
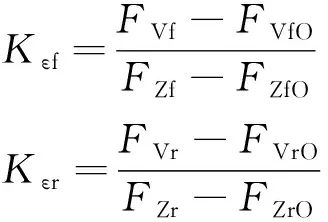
(15)
式(15)中:FVf、FVr分别为前后悬架弹簧阻尼力;FVfO、FVrO分别为前后悬架静弹簧阻尼力;FZf、FZr分别为前后轮胎与地面接触点的地面支撑力;FZfO、FZrO分别为作用于前后轮胎接触点的静态地面支撑力。
车辆轴距DL的变化主要反映悬架的纵向伸缩能力和制动时车轮的垂直弹跳伸缩能力。重心在垂直方向Z的位移反映了车辆弹性势能的变化。如图6所示,如果这两个数值较大,则表明车辆悬架在制动过程中吸收了更多的弹性势能,车辆俯仰动作的动能很小,制动舒适性良好,故通过合理设计悬架的刚度可以优化汽车的俯仰特性。
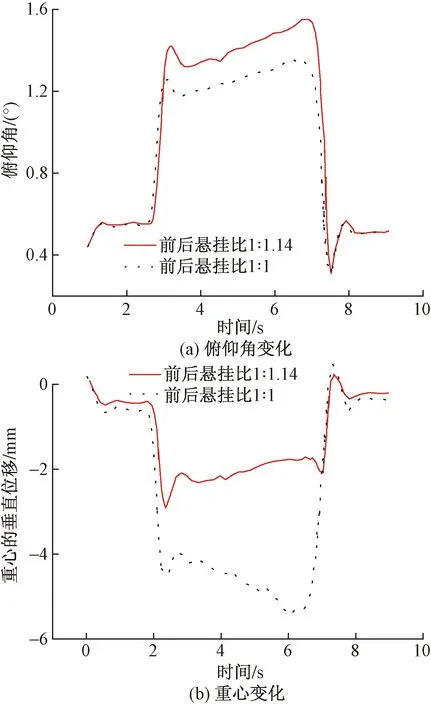
图6 制动时俯仰角和重心的变化[28]Fig.6 Change in pitch angle and center of gravity during braking[28]
主动控制悬架各部件以此来控制车辆姿态的方法从理论上来说固然有效,但是由于其技术复杂加上成本昂贵,要想在未来大面积地应用在车上仍然有很长的路要走,还需要不断的技术革新。
3.2 从制动角度考虑
制动系统从最初的纯机械助力,到真空助力,到现在的电控助力的发展中,实现了制动力的精确控制。在制动过程中可通过调整制动力输入来提高制动舒适性[29-30]。
在紧急制动工况下,制动系统应该首先满足制动距离的要求,在非紧急制动工况下,应该提高制动舒适性。在城市交通中大多数的制动属于非紧急制动工况。在现有的车辆制动控制中,为确保安全性,制动力通常按相同的利用附着系数来分配。这种“理想”的制动力分配方式虽然能满足安全性,但是却限制了车辆在其他性能方面的提高。合理通过非等利用附着的制动力分配方式可以有效优化车辆的制动冲击度和俯仰特性,提高舒适性。早在1995年Morita等[31]就提出可以通过合理的制动力分配来改善制动性能并减小制动俯仰,通过有效利用停车时的后制动力来适应制动时的载荷转移。Yi等[32]提出了一种在车辆制动安全性与舒适性之间折中的控制律。Tavernini等[16-17]分别将前馈算法和模型预测控制(model predictive control,MPC)算法用于在不同制动减速要求下制动力分配,以达到最小俯仰角的目的。对于车辆在完全停车后会产生车身反弹的问题分别设计了线性二次调节器(linear quadratic regulator,LQR)和全状态反馈控制器来解决。文献[33-34]将制动工况分为紧急与非紧急。在非紧急制动工况下,识别路面状况,借助经验公式合理分配前后轴的制动力。仿真结果显示,无论是在干燥路面还是在湿滑路面上,最大减速度都没有超过3 m/s2,但是并未考虑制动力重新分配后制动距离增加。
在制动后期由于临近停车,车辆的速度很小,车辆的前后轴制动力具有冗余,可以在此时适当减小前轴制动力,增加后轴制动力,也就是通过非等利用附着系数的方法改善车辆的制动舒适性。研究人员进行相关试验,清华大学的霍舒豪[11]及浙江工业大学的毛芳敏[14]在制动后期(v<2 km/h,v为速度)将后轴制动压力减小1/3,并在算法结束后对制动系统重新增压至原来的水平。如图7及表2所示,制动距离增加了5 cm,但制动舒适性提高了46.18%,效果显著。
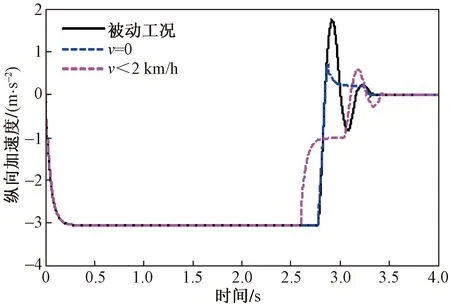
图7 施加控制前后效果图[11]Fig.7 Before and after the control is applied[11]
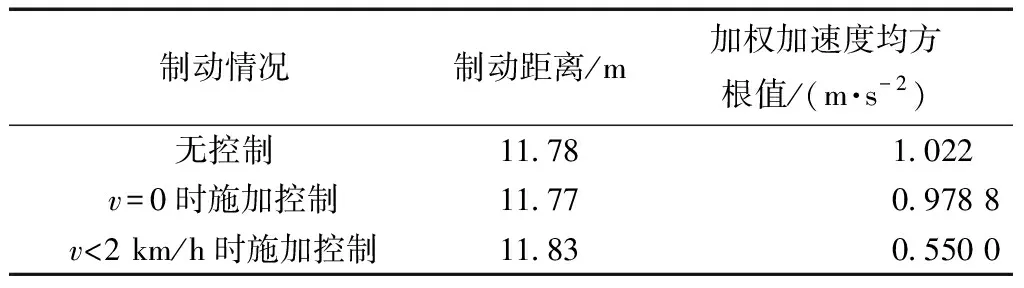
表2 施加控制前后参数[11]
3.3 悬架和制动系统联合控制
在大多数汽车控制器的设计方法中,悬架和制动的控制系统是独立设计的,没有明确考虑它们的相互作用,事实上悬架的垂向作用会影响到制动力的大小,从而影响汽车的俯仰,所以这样不是最优的控制选择。车辆在制动时的俯仰可以通过控制制动力大小和悬架进行多目标优化来减小,所以一部分学者开始研究悬架和制动系统的联合控制[11, 13-15, 35-37]。
Zhang等[35]建立了考虑制动和悬架动力学之间耦合的线控制动车辆的舒适制动动力学模型,基于模型提出了一种鲁棒舒适性制动控制方案,综合调节车轮滑移率和悬架运动。文献[37]通过悬架和制动系统的联合控制来解决车辆的舒适性和操纵稳定性的优化问题。通过的车辆观测器观察到的驾驶情况,合成两个增益调度控制器以实现姿态和偏航性能。如图8所示,通过简单的车辆观测器得到驾驶工况,两个H∞增益调度控制器得以优化姿态和偏航性能。
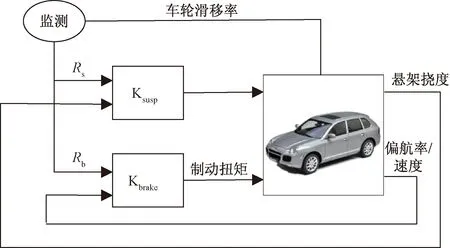
Rs为悬架的增益调度参数;Rb为制动的增益调度参数;Ksusp为悬架控制器;Kbrake为制动控制器图8 悬架与制动系统联合控制[36]Fig.8 Combined control of suspension and brake system[36]
大多研究都是基于非危险工况,文献[36]就紧急制动这一危险工况下,通过主动悬架和制动系统的共同作用对俯仰姿态进行优化,考虑了紧急制动时车辆垂直载荷的转移以及车速变化对路面输入的影响。
相比与悬架与制动系统的单独控制,二者的联合控制的乘坐舒适性效果更好,但是二者的作用力相互耦合,技术较为困难,且由于控制机构包含悬架系统,成本问题仍然未解决。
4 乘坐舒适性的控制方法
4.1 频域分析
按不同的分类方法,车辆纵向运动的乘坐舒适性研究可分为时域和频域两类。大多数车辆的纵向控制设计考虑了时域舒适性标准下的冲击度和加速度约束。然而,很少在关键的频率范围内讨论乘坐舒适性。除了由加速度和冲击度产生的短暂不适,持续的低频振动也是造成乘客不适的重要原因。
文献[7, 18, 38-40]提出了包括悬架和轮胎的车辆动力学模型,通过分析纵向力到纵向加速度的频率响应。 证明了在制动停车时影响车辆乘坐舒适性的关键因素是“轮胎振动模式的切换”,而不是悬架。如图9、图10所示,当车速不为0时,轮胎的振动频率(10 Hz以上)在人的敏感区域以外。当车辆处于制动后期,较大的制动力会将车身和轮胎“粘”在一起,由于这种非线性,整个车身的频率被降到较低的频率(通常4 Hz以下),这是让人感到不舒适的敏感区域(0.4~4 Hz),应该避免这种情况的出现。因此,必须在停车时让轮胎和车身的速度都为0,以此远离不舒适的频率范围。Youn等[41]从时域和频域两个方面对悬架控制系统的动态特性进行了评估。
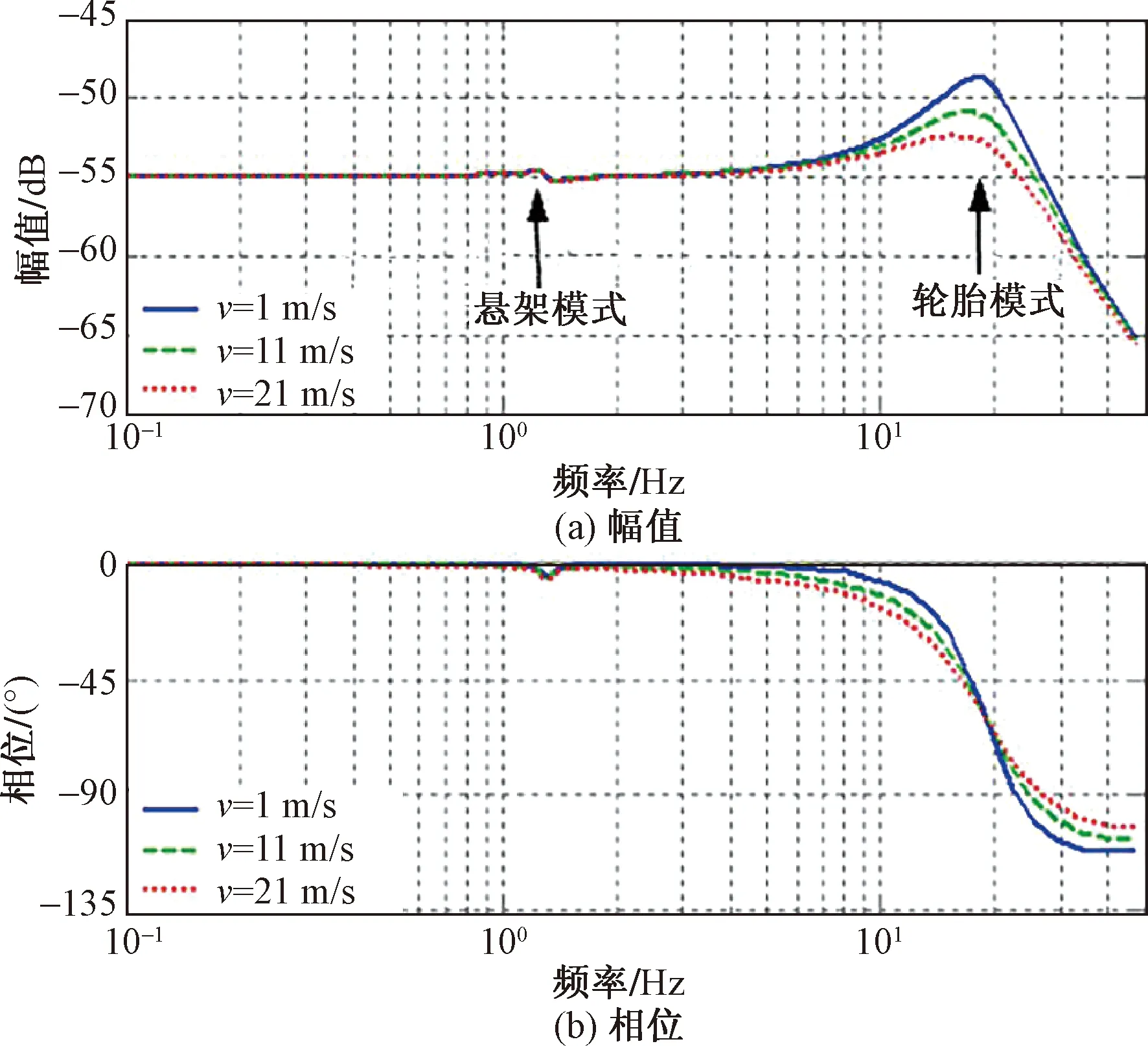
图9 纵向力到纵向加速度的频响曲线[38]Fig.9 Frequency response curve of longitudinal force to longitudinal acceleration[38]
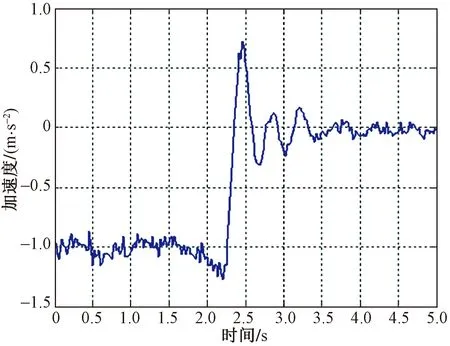
图10 轮胎振动模式的切换[38]Fig.10 Tire vibration mode switching[38]
4.2 减速度曲线规划
解决制动舒适问题,应从机理出发。无论是从主观的判断还是客观的数据来定义舒适性,最终都要以乘客在驾乘过程的感受为标准。一个统一认同的观点是:人类的前庭系统无法感受速度的变化,但是能感受加速度变化的大小,对于冲击度的变化更敏锐,猛烈的加速度变化会导致舒适感下降,甚至感到恶心。因此,部分研究重新规划制动时的速度和加速度曲线,将其平滑处理,提高了制动时的舒适性。
分析加速度的一阶导数即冲击度,可以在加速度快速变化的过程中找到突变点。如图11所示,需要能够产生平滑轨迹的轨迹规划方法才能减小冲击度。
文献[42]提出了一种新的方法,在轨迹规划控制器中引入速度规划阶段,以生成足够的时间序列用于插值曲线规划。在这种情况下,生成了速度曲线(包括距离和角度),引导轨迹尊重人们的舒适性要求。轨迹跟踪策略使用的是滑膜控制技术。Lee等[30]设计了一个关于制动舒适性的控制器,该控制器包括了两层含义,一是可以生成期望的加速度轨迹,而是可以通过PI控制较好地跟踪生成的加速度轨迹。在低风险情况下,最大程度减少因加速度急剧变化而导致的不舒适。如图12所示,通过平滑速度和加速度曲线,可以将冲击度大大减小。
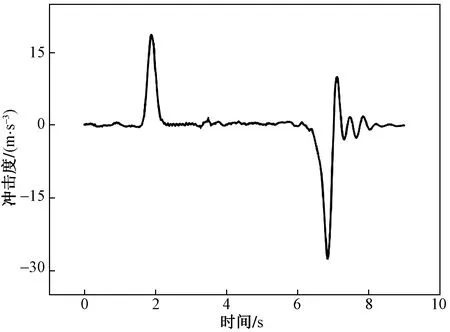
图11 制动时的冲击度曲线[28]Fig.11 Jerk curve during braking[28]
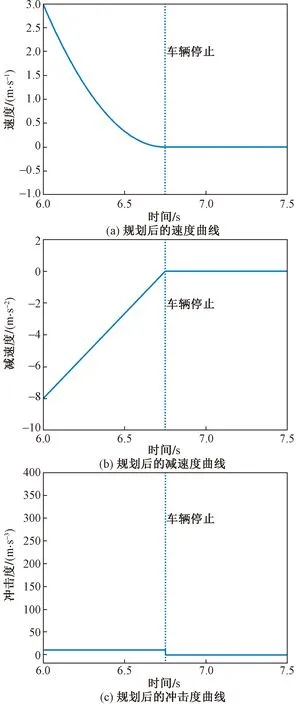
图12 规划速度、加速度曲线后的效果[30]Fig.12 The effect after planning the velocity and acceleration curve[30]
4.3 微分平坦逆动力学
该方法的本质为从已知输入求输出的正向动力学转向已知输出求输入的逆动力学问题。在制动控制中,需要对制动的模型进行分析,通过微分平坦方法设计合理的输出,将系统变为可逆的微分平坦系统,解决以优化目标为基础的制动力输入控制。车辆减速曲线的优化问题和车轮制动力逆动力学输入的求解问题在实现制动多目标性能优化时,需要根据制动目标来对制动力输入进行逆向求解[43]。
文献[44]开发了针对每个车轮的制动算法,该算法可以响应驾驶员输入和设定的开始减速点。该方法采用逆向思维,由期望的输出反向来求解需要给的输入,对应于制动舒适的模型,模型的输出为车辆的速度,输入则为制动力矩。针对每个单独车轮的制动设计算法,该算法由一个前馈控制组成,该控制可以使车辆在制动时处于一个理想的姿态。
目前在制动控制中用微分平坦逆动力学的方法还比较少见,但是在轨迹规划领域已经十分常见。由于此理论本身的优越特点,在以后的制动控制研究中将占有一定的地位。
5 自动驾驶背景下的乘坐舒适性
美国汽车工程师学会 (society of automotive engineers,SAE) 定义了6个无人驾驶等级,从0级(完全手动)到 5 级(完全自动)。在车辆从手动驾驶到自动驾驶到无人驾驶的发展趋势中,驾驶员双手逐渐得到解放,对于无人驾驶的车辆来说,车辆与车辆之间的事故发生概率大大减小,因此对于制动系统来说研究的重心将从安全性转到舒适性。自动驾驶汽车要想被人们所接受的很大一个理由就在于与传统汽车类似的驾乘感受,甚至要优于传统汽车。对于自动驾驶的汽车来说,乘坐舒适性主要是取决于不同的驾驶风格[45]。
5.1 混行交通环境下的乘坐舒适性
在未来一段时间内的交通环境将是由自动网联汽车(connected automated vehicle, CAV)和人工驾驶汽车(manual vehicle, MV)共同构成的混行交通流。在此背景下,梁军等[46]提出一种考虑驾乘舒适性的双层控制策略(dual-layer control strategy considering ride comfort, RC-DCS)。上层控制器从宏观角度出发,采用两状态空间模型调整跟车间距及车速,并利用代价函数改善车队的整体稳定性和舒适性;下层控制器从微观角度出发,优化单车的油门和制动踏板切换逻辑,稳定实际加速度输出,减小车辆频繁加减速引起的自身俯仰角。
5.2 自动驾驶汽车的乘坐舒适性
自动驾驶考虑纵向平顺性的纵向控制也大多采取了限制控制过程中纵向加速度和冲击度的办法,但是,这样的控制思路没有详细分析制动过程的特性以及对于加速度较大的非紧急制动工况下的纵向平顺性控制是不适用的。
Burkhard等[47]提出了一个较新的概念,认为随着自动驾驶系统的不断发展,乘员将成为研究的重点,从乘员本身出发为乘员而不是车身推导加速度要求。在自动驾驶级别3级以上的车辆中,司机变成了乘客,在驾驶时行为会改变,会在车辆中睡觉、阅读、工作等,活动范围增加,从而对驾驶舒适性和车辆的驾驶动态提出了新的要求,新的控制器不仅要控制车辆制动力,还应可以控制其相对于乘员的力。Bellem等[48]利用驾驶模拟器来提供一个安全的环境进行自主驾驶的舒适性的研究。
5.3 ACC工况下的乘坐舒适性
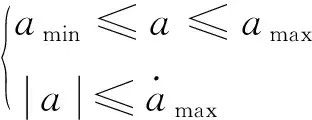
越来越复杂的交通状况要求高级自动驾驶辅助系统(advanced driving assistance system,ADAS)性能更完善。自适应巡航控制(adaptive cruise control,ACC)是ADAS中的一个重要组成部分,它能够保持驾驶人预先设定的车速,还能够在特定驾驶条件下随时根据需要降低车速,甚至自动制动。在设计中主要考虑两个方面的性能:安全性与舒适性。在紧急情况下,制动系统应该发挥出最大效能以确保安全性,而在普通的ACC制动工况,例如跟车工况,应保证制动时的舒适性。跟车属于ACC的最常见工况,在跟车中需要控制速度、加速度和距离,以保证乘员的舒适性与安全性。
许多关于ACC的研究重点在于安全性,较少考虑舒适性,Althoff等[49]提出了一种在ACC工况下兼顾安全性的同时考虑舒适性的解决方案。文献[50]建立了一种关注乘客舒适性的跟车模型。该模型是根据车辆减速度与乘客舒适度之间的关系建立起来的,并考虑了车辆与路面之间的摩擦因数。该模型通过测量被控车辆与其前一辆汽车之间的距离以及被控车辆的速度来计算被控汽车的加速度。通过控制车辆的加速度,该模型能够让乘客在跟车时保持舒适性。
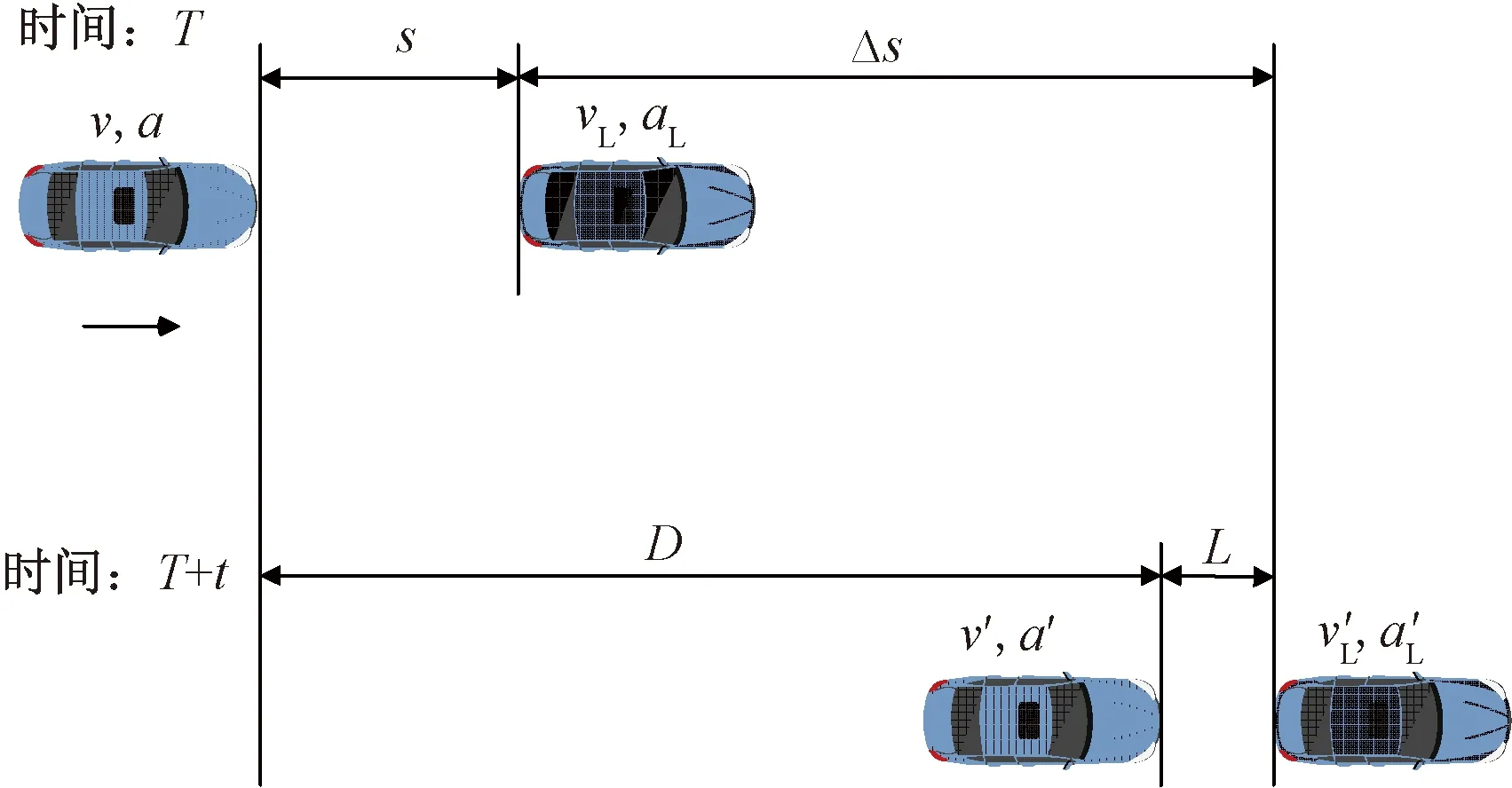
图13 跟车模型[47]Fig.13 Car-following mode[47]
如图13所示的跟车模型。驾驶员以速度v进行跟车,并且保持着s的距离,在T时刻,前车辆开始制动,在T+τ时刻,后车驾驶员意识到需要减速来保持安全距离,并开始以a的减速度进行制动。假设到停车时两车间隔为L,从T+τ到车辆停止时刻T+t,前车和后车的位移分别为Δs和D。故有
s+Δs=D+L
(16)
由后车的位移可得
2aD=v2
(17)
由式(16)和式(17)可得
2a(s+Δs)=v2
(18)
将路面摩擦因数考虑在模型中,由经验公式可得最小距离与路面摩擦因数的关系成为
(19)
式(19)中:vL为前车车速;μ为路面摩擦因数;g为重力加速度。
根据该模型,如果间隔s达到某一值(舒适制动距离),就会相应的调整跟车的速度,直到其速度满足舒适制动距离。在这一情况下,当间隔s接近舒适制动距离时,前车的速度vL接近于后车的速度v。由于前车的行为不可预测,只能控制后车的行为,以最坏的情况,即Δs等于Δsmin的情况,表达式为
(20)
由式(20)可以计算出加速度的值,然后通过控制此加速度的值在舒适的阈值内来避免跟车时的不适。
Butakov等[51]从期望的跟车距离出发,建立了考虑驾驶员风格的舒适跟车模型。
如图14所示将目标车速v设置为前车车速vP,保持间距xR接近目标间距sD,即
vR→0,δ→0,t→∞
(21)
式(21)中:vR=vP-v,δ=xR-sD。sD可表示为
sD=h0+h1v2
(22)
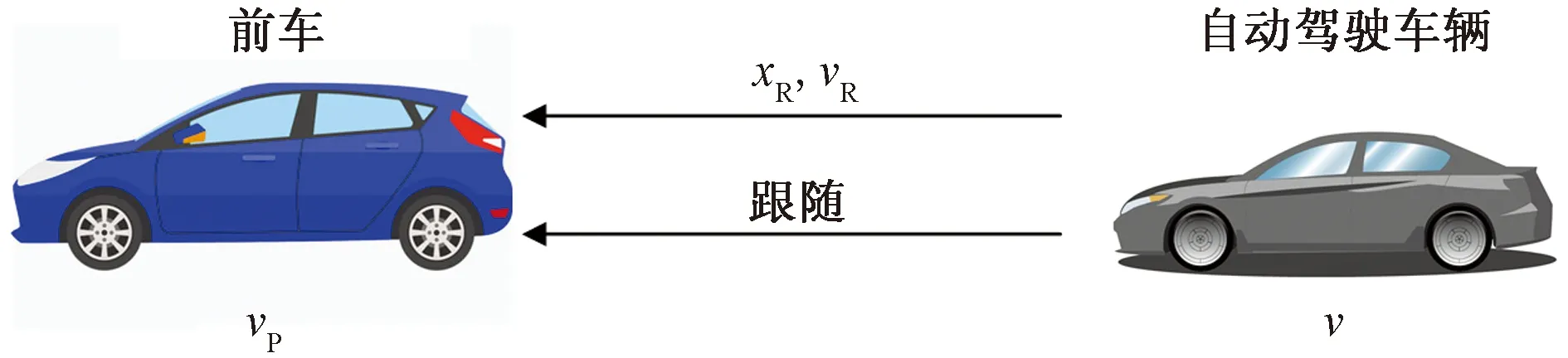
图14 另一种跟车模型[51]Fig.14 Another car-following model[51]
式(22)中:h0为当车速为0时的间距;h1为间距控制参数,实际是与加速度相关的参数,反映了间距对速度的依赖性。h1的正负不做限制,因为它随着驾驶员风格的变化而变化。除了合适的间距控制之外,为了满足驾驶员的舒适性要求,系统必须满足以下的约束条件:
(23)


(24)
在ACC中存在车道变换/多车辆场景,这种车道变换操作可能会导致交通的堵塞和驾驶的不舒适。针对这一问题Schmied等[52]通过MPC算法来设计控制器,将其他车辆可能的变道几率作为外部干扰,提高系统的鲁棒性。在保证交通流量的同时将车辆的减速度和冲击度降至最低。考虑了两种不同的交通场景来验证控制算法,然而现实中交通场景十分复杂,在设计控制器时考虑多方面的工况仍是一个重点和难点。
Mohtavipour等[53]提出舒适度更依赖于参考信号形式。由于从数学关系构建的参考信号包括不同的功能,为了防止不舒适感觉,其变化应尽可能小。尤其是在两车处于相对静止状态下,在这种状态,间距发生变化后,制动系统通常会施加更大的制动力以保证安全性。
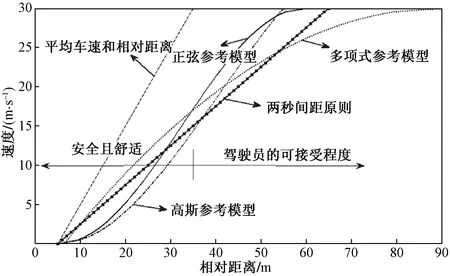
图15 不同类型的速度与相对距离关系比较[53]Fig.15 Comparison of different types of speed and relative distance relationships[53]
如图15所示,分别是高速公路上驾驶员的平均速度,它们的相对距离最小。还有二次插值策略,这条策略更安全,但是被接受程度很低,因为不太符合实际。因此非线性模型才能很好地模拟驾驶员行为,即图中的高斯参考模型和正弦参考模型,它们可以在相对较小的距离内获得更舒适的跟车速度,并且它们通过平滑的变化让速度接近零。
6 其他关于乘坐舒适性的研究
轮毂电机由于其特殊的结构,其每个车轮上的转矩可以快速精确地控制,故在装有轮毂电机的电动车上可以通过控制电机的转矩更好地控制车辆制动时俯仰运动[54-56]。
对于地铁、电梯等具有低风险、频繁启停特点的乘用工具,研究人员也对其开展了舒适制动的研究[57-59]。虽然是针对在地铁、电梯的研究,但是其对制动舒适性的机理分析同样适用于普通乘用车。Pavlov等[60]对地铁制动过程结束时的减速度进行调节,并探究了乘客舒适度对地铁停车定位精度的影响。通常地铁制动时的减速度变化规律如图16所示,在trise内制动力和制动减速度分别增加到规定的行车制动值,在tconst保持恒定的减速度,在最后一个阶段trel,列车到达指定的点位,制动器开始释放。在此过程中只是简单地在制动后期延长制动释放时间来减小制动减速度,并未从理论上给出减速度减小轨迹曲线。Powell等[61]探究了在正常运行中纵向加速度对铁路乘客的影响,以及其舒适性和安全性的关系。通过试验验证了乘客所能承受的加速度极限。
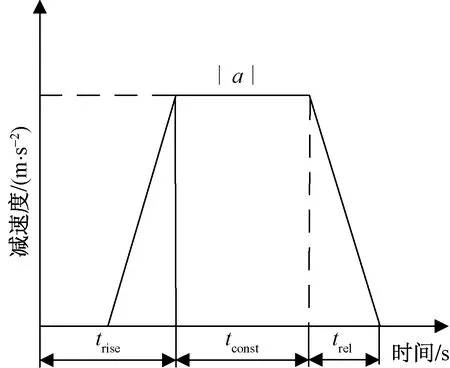
图16 地铁制动过程中减速度的变化[61]Fig.16 The variation of deceleration in the process of subway braking[61]
文献[62]提出了一种基于单片机实现的驾驶风格软硬件识别系统。用于提高汽车的乘坐舒适性。该系统基于单芯片实现,能够将驾驶数据分为几个舒适度等级并且提供关于乘坐舒适度的实时信息。重点在于机器学习,通过单片机的机器学习在车上的集成,敏感并正确地识别驾驶员的驾驶风格来减小车身的俯仰振动,从而提高乘坐舒适性。
7 结论和展望
分析并探讨了乘坐舒适性的机理,整理归纳了实现良好乘坐舒适性的优化方法,论述了各研究方法的优缺点。一个良好的乘坐舒适性体现为车辆需要给以驾乘人员舒适的感受,以及充足的制动信心。这需要综合考虑多方面的因素,这也是解决制动舒适性问题的难点所在。就控制结构而言,通过改变悬架及制动系统的作用力可以改善制动舒适性,其中由主动悬架控制效果更为显著,但是其存在技术困难、成本较高、在大多数车辆上还不具备等缺点,因此通过制动系统改善乘坐舒适性更具有实际意义。针对制动系统可以考虑对制动减速曲线进行优化、采用微分平坦逆动力学进行分析或者在重要的频率范围内对车辆纵向特性进行控制。解决车辆制动舒适性问题的研究重点在于通过制动系统的作用,在不丢失驾驶员制动信心的情况下,合理规划制动减速度曲线,使制动冲击度得以减小,最终改善制动舒适性。
目前关于制动舒适性这方面的研究还较少,但是在未来会成为一个热点及重点。随着理论的逐渐丰富,乘坐舒适性的体系将会得到不断的完善。
猜你喜欢
汽车实用技术(2022年16期)2022-08-31
汽车实用技术(2022年16期)2022-08-31
当代水产(2022年6期)2022-06-29
福建轻纺(2022年4期)2022-06-01
中国典型病例大全(2022年9期)2022-04-19
载人航天(2021年5期)2021-11-20
现代仪器与医疗(2021年2期)2021-07-21
时代汽车(2021年1期)2021-03-03
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
