
调制光栅Y分支激光器波长准连续调谐方法
2022-07-27 08:47任帅庄炜董明利王永千闫光吴越
光子学报 2022年6期
任帅,庄炜,2,董明利,2,王永千,2,闫光,2,吴越,2
(1 北京信息科技大学 光电测试技术及仪器教育部重点实验室,北京 100192)
(2 北京信息科技大学 光纤传感与系统北京实验室,北京 100016)
0 引言
近年来,可调谐激光器作为光谱分析、波分复用和光栅解调的核心器件,被广泛应用于光纤传感领域[1-4]。其中,调制光栅Y 分支(Modulated Grating Y-branch,MG-Y)激光器作为一种新型的可调谐激光器,具有体积小、可调谐范围宽、快速波长切换等特性,在光纤传感解调领域极具应用优势[5-8]。
MG-Y 激光器在传感领域应用研究的一个关键是其需要同时对多个输入电流进行控制,构造稳定、准确且尽可能连续的波长查找表(Look Up Table,LUT),是其应用于光纤传感解调领域的重要前提[9-10]。但MG-Y 激光器波长调谐特性复杂,传统构建方法工作量大,精细调谐波长分辨率低,且难以保证输出光波长的准确度与稳定性,从而影响光纤传感解调系统的解调精度。因此,构建一个可实现MG-Y 激光器准连续调谐的LUT 至关重要。
目前,常用的MG-Y 激光器波长控制参数表构建方法是对波长控制参数进行遍历扫描。MULLER M S 等[11]采用等控制参数步进扫描的方法来控制MG-Y 激光器实现快速的波长调谐,光纤布拉格光栅(Fiber Bragg Grating,FBG)加速度传感器的解调结果证明了激光器可进行快速波长调谐,并且波长控制参数须根据每个波长进行调整,但未给出具体调整方案。而MG-Y 激光器由5 路驱动电流作为波长控制参数,若利用16 位数模转换器进行精细扫描,需扫描216×216×216×216×216组数据,且电流与输出波长并非线性关系,因此,该方法扫描遍历数据量大,采样周期长,数据的利用率不高。
其他的构建方法主要是通过插值的方式来提高LUT 的构建效率。郑胜亨等[12]利用线性插值的方法构建了pm 级的MG-Y 激光器LUT,通过测试乙炔气体吸收腔的温度稳定性证明了该构建方法可行。该方法虽简单可行,但调谐路径不平滑,在实际工程应用中,无法保证输出光波长的稳定性。为此,刘强等[13]利用样条插值的方法构建了MG-Y 激光器LUT,实现了0.3 nm 的精细调谐,并证明了该方法可用于外腔式法珀干涉型传感器光谱采集和绝对腔长解调。该方法虽提高了调谐路径平滑程度,但波长精细调谐分辨率有待提高。
针对上述问题,本文提出一种基于K近邻(KNearest Neighbour,KNN)算法的LUT 构建方法。该方法通过KNN 分类模型,快速分类左、右光栅准连续调谐区域,有效提高MG-Y 激光器LUT 构建效率;在相位调谐区内,采用牛顿插值进行目标波长的插值检索,调谐路径平滑,可提高输出光波长的准确度与稳定性。
1 原理
1.1 MG-Y 激光器调谐原理
MG-Y 激光器是一种电流调谐的半导体激光器,通过改变注入电流的大小引起该区半导体材料的自由载流子浓度发生变化,从而实现快速波长切换,其管芯结构如图1(a)。由5 路驱动电流作为波长控制参数控制其正常工作,其中,增益电流IGN、半导体光放大器(Semiconductor Optical Amplifier,SOA)电流ISOA主要控制输出光功率,左栅电流ILR、右栅电流IRR、相位节电流IPH主要控制MG-Y 激光器输出波长[14]。左、右光栅反射区基于游标效应,通过两个光栅反射器实现宽调谐,通过产生间距不等的梳状反射谱,调节ILR、IRR控制重合峰的位置,保证某一时刻的反射光波长为一对重合峰的反射波长,如图1(b)。为实现连续调谐,再由IPH控制输出光的相位谐振条件,实现波长的细调,从而实现波长连续调谐。
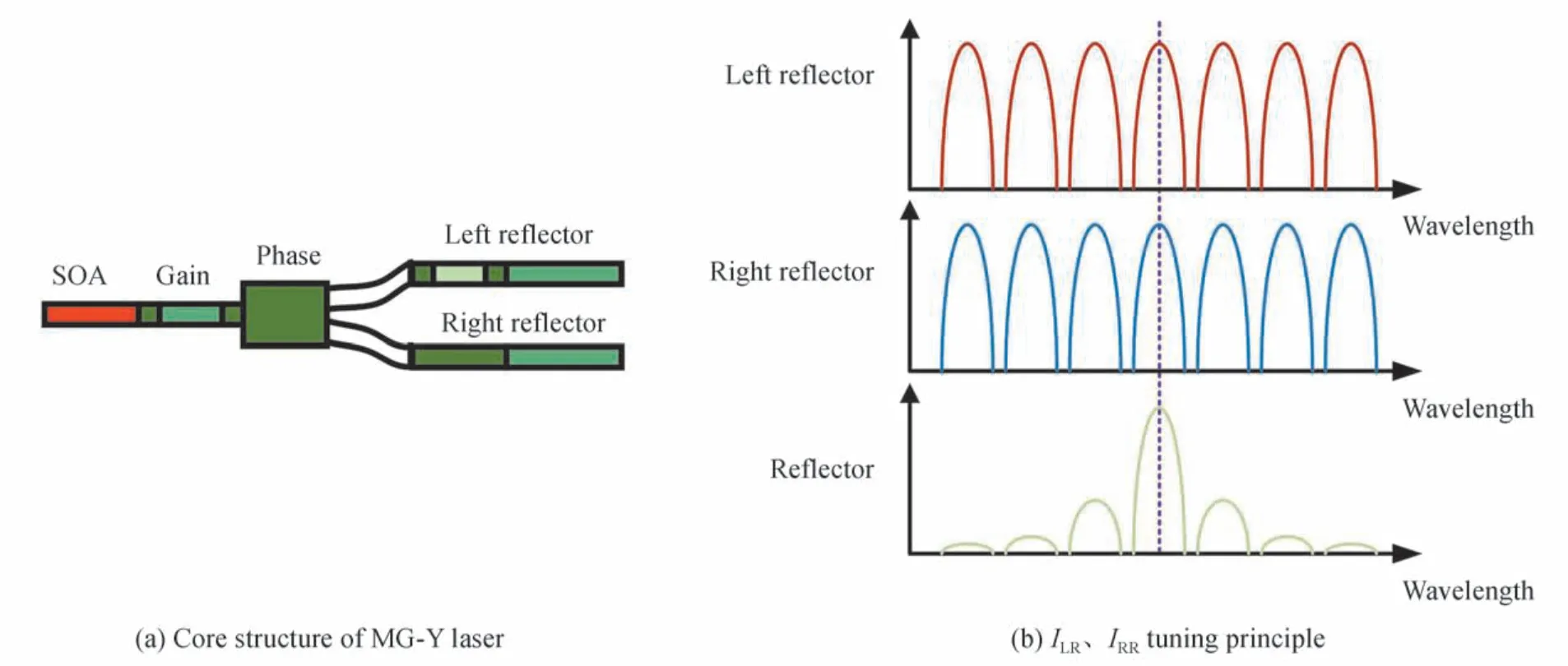
图1 MG-Y 激光器Fig.1 MG-Y laser
通信领域应用该激光器需要的波长间隔通常为0.4 nm,无法满足高精度光纤传感解调领域需求,因此,MG-Y 激光器应用于光纤传感领域的关键就在于如何快速获取有效的MG-Y 激光器LUT,并实现准确且稳定的波长快速切换。
1.2 KNN 分类算法
为了提高MG-Y 激光器LUT 构建效率,采用KNN 分类方法实现MG-Y 激光器ILR、IRR调谐区域快速分类,然后根据分类结果分析该模型的有效性和在不同激光器的泛化性。
1.2.1 KNN 分类原理
KNN 是一种简单易行的无参数分类算法,主要思想是先计算待分类样本与已知类别的训练样本之间的距离,从中找到距离最近的K个邻居;再根据K个邻居样本所属的类别来判断待分类样本数据的类别;如果K个样本中的大多数属于某一个类别,则该样本也属于该个类别。
KNN 分类算法主要涉及三要素:距离度量、K值的选择、分类决策规则。距离度量是两个实例点相似程度的反映,距离小,则相似度大,当数据稠密且连续时,欧氏距离是一种具有良好效果的距离计算方式。K值的大小是分类准确率和分类速率的一个重要影响因素,在保持较高分类准确率的情况下,K值的选取应尽可能小。KNN 中的分类决策规则往往是多数表决,即由输入实例的K个近邻的训练实例的类别。
1.2.2 模型评估方法
采用KNN 进行ILR、IRR调谐区域多分类,区别于二分类问题的评估方法,可将多分类问题转化为多个二分类问题进行讨论,分别计算精确率、召回率、以及精确率和召回率的调和平均F1-score。对于二分类问题评估指标F1计算表达式为

式中,P为准确率;R为召回率;NTP为分类预测为正、标签为正的样本数目;NFP为分类预测为正、标签为负的样本数目;NFN为分类预测为负、标签为正的样本数目;F1对精确率、召回率进行综合评价,F1越高,说明分类方法越有效,分类器的分类能力越强。
2 基于KNN 算法的准连续调谐查找表构建
为控制MG-Y 激光器实现稳定波长准连续调谐,提出一种MG-Y 激光器LUT 构建方法,该方法实现了覆盖1 525~1 565 nm、间隔20 pm 的MG-Y 激光器LUT。该LUT 共包括2 000 个波长点,具体构建流程如图2,整个构建过程主要分为5 个部分:获取初始扫描数据、识别ILR、IRR准连续调谐范围、识别每段IPH线性调谐范围、检索单个路径内目标波长插值、生成MG-Y 激光器LUT。
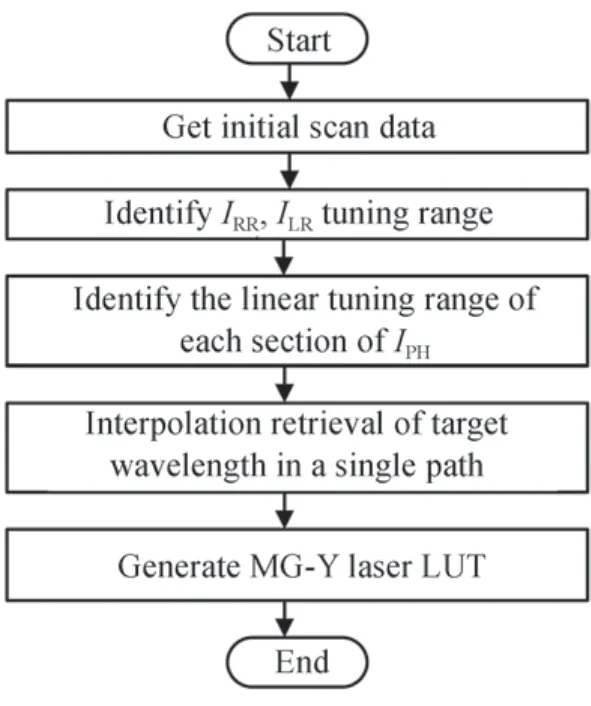
图2 MG-Y 激光器LUT 构建流程Fig.2 Tuning principle of MG-Y laser
1)获取初始扫描数据。由于激光器驱动模块设计以及复杂制作工艺不同,每台MG-Y 激光器的准连续调谐查找表都不相同。为保证激光器正常工作并满足光纤传感应用需求,将IGN和ISOA均设为80 mA,因IGN和ISOA主要控制输出光功率,其改变会影响所构建LUT,尤其是影响输出光波长的稳定性,所以该阶段对IGN和ISOA保持不变。依据确定的初始扫描范围,扫描得到初始波长数据。该初始扫描表约包括54 万个波长控制参数组合,ILR、IRR非均匀控制参数步进扫描0.96~33 mA 范围;IPH在线性区域内按照0.4 mA 均匀步进规则扫描0.21~6.51 mA 范围。
2)识别ILR、IRR准连续调谐范围。通过图3(a)可看出,MG-Y 激光器存在明显的几段准连续调谐区域,每段准连续调谐区域波长范围约5 nm,通过拼接可实现40 nm 宽范围波长调谐。图3(b)中8 个不同颜色段代表所需要的ILR、IRR准连续调谐范围,人工进行准连续调谐范围检索的效率较低,基于KNN 多分类模型,将8个有用准连续调谐段设置成8 类别,冗余部分设置为第9 类,可明显提高LUT 构建效率。

图3 ILR、IRR调谐波长结果Fig.3 ILR,IRR tuned wavelength results
调用sklearn 机器学习工具包,输入为激光器L1的波长控制参数,输出波长以及对应类别为原始数据集,将其按7∶3 化成训练集与测试集,以激光器L2的数据集为验证集;输出为各测试样本的预测类别。采用欧氏距离反映两个实例点的相似程度,通过交叉验证的方法得到最优K值,同时选取F1值与K值的关系进行实验验证,结果表明当K=5 时,分类的结果较优。
KNN 分类模型评估结果如表1,整个算法在CPU(Intel 酷睿i7 9700,内存为16 GB)上的运算时间仅为10 s,大幅度缩短了LUT 构建时间,加快了分类速度;分类准确率为77%,在降低分类工作实现难度的基础上,保证了激光器可识别出MG-Y 激光器偏差不超过1 nm 的准连续调谐路径,满足目标LUT 后续构建步骤需求;根据模型预测结果得到的最大波长间隔为50 pm,约等于目标LUT 中3 个点间隔,可通过相位节电流精细调谐实现缺失波段补偿,满足工程应用需求。

表1 KNN 分类模型评估结果Table 1 KNN Classification model evaluation results
3)识别每段IPH线性调谐范围。处于ILR、IRR准连续调谐范围边缘处的输出波长稳定性低,易出现跳模现象,因此,为了提高输出光波长的稳定性,在每个ILR、IRR准连续调谐段内依据IPH精细调谐特性,依据最小聚类算法,获得一个个IPH线性调谐路径。
4)单个路径内目标波长插值检索。首先应设置波长阈值,找出每个IPH调谐区域段内部等波长线,然后在内部波长等高线上,以一定波长间隔取插值点,最后按照牛顿插值非均匀插值规则,在参考点之间进行目标波长插值检索。某个IPH线性调谐段内波长参数组合插值曲线如图4,图中x、y轴分别代表ILR、IRR,z轴代表IPH,颜色代表不同的等波长面,其中标记“X”为目标插值点。
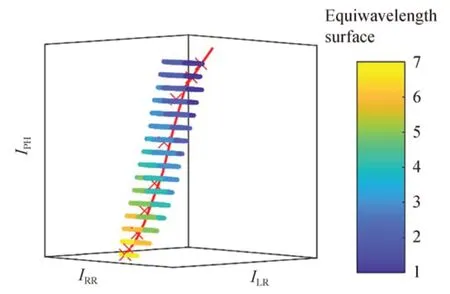
图4 IPH线性调谐段内波长参数组合插值曲线Fig.4 Combined interpolation curve of wavelength parameters in IPH linear tuning section
5)生成MG-Y 激光器LUT。从单个路径内目标波长插值检索波长调谐曲线上提取波长范围为1 525~1 565 nm,波长间隔20 pm 的波长控制电流组合及其对应波长。
MG-Y 激光器LUT 中的波长间隔大小的选取与所采用的寻峰算法有关。质心法是一种非常适合实际工程应用的寻峰算法,计算量较少、计算速度较快,并且适用于大多数FBG 光谱解调。采用质心法至少需要10 个点才可满足寻峰算法精度需求,同时在扫描周期一定时,点数过多会导致电流快速切换,引起波长较大偏移。由于采用的FBG 传感器3 dB 带宽为200 pm,因此,所构建MG-Y 激光器LUT 波长间隔设置为20 pm。
3 实验结果与分析
为验证所构建MG-Y 激光器波长LUT 在实际光纤传感解调工程应用中的有效性,首先,进行MG-Y 激光器波长调谐实验,验证激光器的出光稳定性与准确度;然后,进行F-P 标准具解调实验,验证基于所构建LUT 的光纤光栅解调系统可应用于FBG 解调;最后,通过FBG 解调实验,验证所构建LUT 用于实际光纤传感解调工程应用的有效性,激光器工作温度均稳定在25 ℃。
3.1 MG-Y 激光器波长调谐实验
为验证按所构建LUT 控制MG-Y 激光器波长的准确度与稳定性,搭建了激光器LUT 实验系统,如图5,连续扫描20 次。实验系统以Xilinx XC7Z020 为主控单元,依据所构建LUT 控制激光器驱动电流输出特定波长的光,利用多波长计(AQ6151,精度为0.3 pm)采集输出波长,采样频率为1 Hz。

图5 MG-Y 激光器LUT 实验系统Fig.5 Laser wavelength parameter-control table test system
实验结果表明,实际扫描波长的均值与目标波长的偏差为±2 pm,标准差为0.7 pm,如图6。证明了按照该表控制MG-Y 激光器输出波长的准确度高、稳定性好,该系统可实现准确且稳定的全光谱扫描和数据采集。
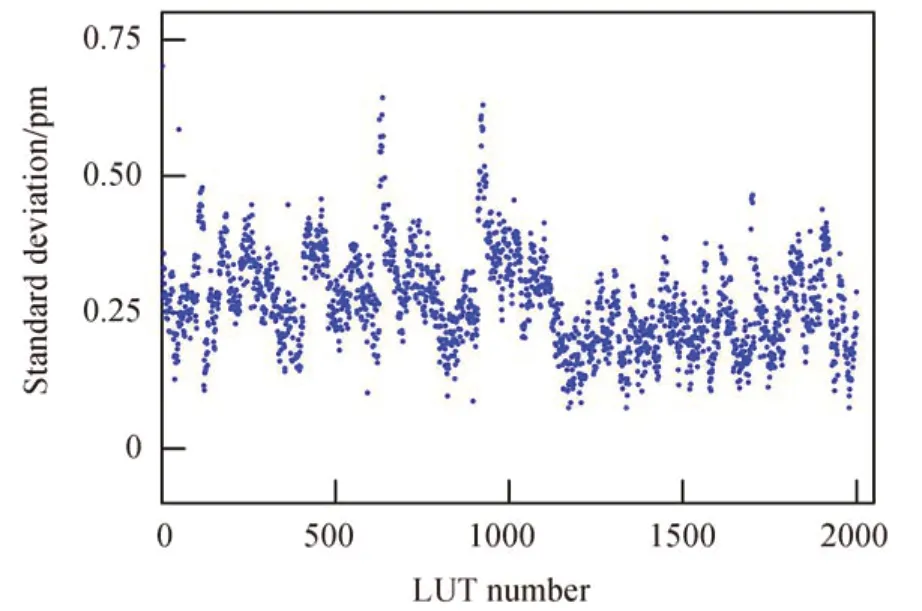
图6 连续扫描20 次波长稳定性Fig.6 Wavelength stability of 20 consecutive scans
3.2 F-P 标准具解调实验
为验证所构建LUT 有效性,搭建了F-P 标准具波长解调实验系统。将F-P 标准具与解调系统置于高低温试验箱(GDW-100)中,保持温箱温度为25 ℃,对F-P 标准具进行光谱采集及波长解调,如图7,采样频率为250 Hz。

图7 F-P 标准具解调实验系统Fig.7 F-P etalon demodulation system
实验结果表明,F-P 标准具其中10 个透射峰扫描1 次的解调波长结果如图8(a)。经计算对每个峰解调400 次的波长标准差均小于1.73 pm,如图8(b)。证明了该方法对光纤光栅解调系统具有一定的实际应用价值,可解调出稳定的F-P 标准具波长。
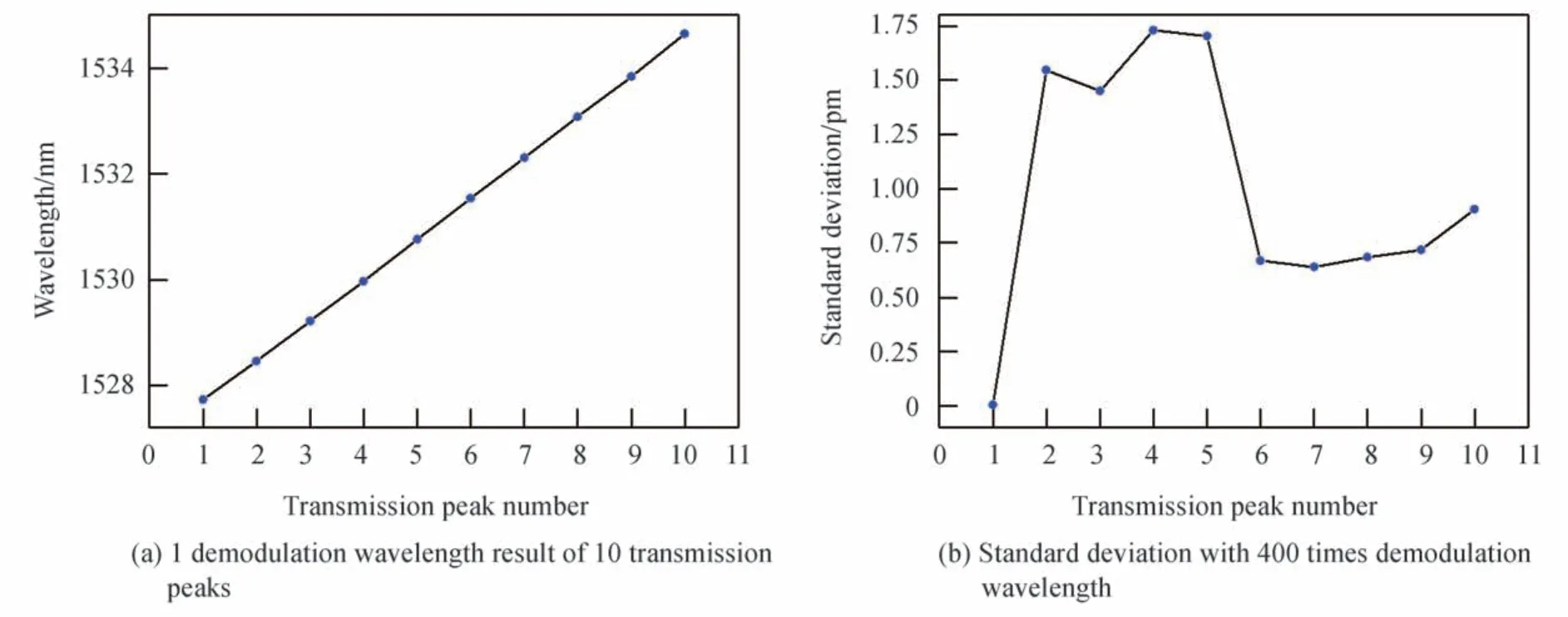
图8 F-P 标准具解调波长Fig.8 F-P etalon demodulation wavelength
3.3 FBG 解调实验
为验证所构建LUT 在实际工程应用中的有效性,基于某型飞机起落架三向载荷的检测需求,搭建了FBG 波长解调实验系统,如图9所示,FBG 温度传感器系数为10 pm/℃。在冲击条件下,利用FBG 传感网络获取起落架结构的应变响应,利用基于MG-Y 激光器的解调系统对FBG 应变光谱信息进行采集与解调,连续测量6 天,共采集104 组光谱数据,单次采样时间为5 s,采样频率为250 Hz。实验结果表明,单次实验过程中的波长偏移变化如图10(a),经计算104 组冲击响应波长偏移曲线相关系数R大于0.952 5,如图10(b),说明多次冲击条件下FBG 的波长偏移曲线相似。

图9 FBG 解调实验系统Fig.9 FBG demodulation system
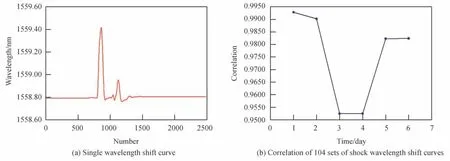
图10 FBG 解调实验结果Fig.10 FBG demodulation experimental results
以其中一天的16 次实验结果为例,分析每次冲击响应前的300 点应变响应解调波长稳定性。为获得由于激光器输出波长引起的FBG 解调波长误差,以每段波长变化均值为基准,首先采用去趋势化的方法,除去零点漂移,然后利用FBG 温度传感器进行温度补偿。图11(a)为16 次实验过程FBG 温度传感器的变化趋势,结果表明实验过程中对应FBG 温度传感器中心波长偏移12.58 pm。图11(b)为经过去趋势化和温度补偿后16 次冲击实验前300 个采样点FBG 应变传感器的响应特性,可以看出FBG 应变传感器解调波长稳定性为1.75 pm,证明了该系统可有效应用于FBG 的光谱采集与波长解调,解调波长稳定性好,满足FBG 网络对结构的应变和载荷监测需求。

图11 冲击响应波长变化曲线Fig.11 Impulse response wavelength change curve
4 结论
提出了一种MG-Y 激光器波长LUT 构建方法,该方法基于KNN 分类模型实现波长准连续调谐区域段快速分类,算法在CPU 上的运算时间仅为10 s,极大地缩短了LUT 查找表构建时间,利用相位调谐特性,采用牛顿插值进行波长精细调谐,调谐路径平滑,通用性良好。实验结果表明,MG-Y 激光器按所构建波长控制参数LUT 进行波长连续调谐时,其输出光波长稳定性好且准确度高。利用该方法的光纤光栅解调系统可实现稳定的F-P 标准具及FBG 光谱采集和波长解调,该方法具有良好的实际应用价值。
猜你喜欢
今日农业(2022年15期)2022-09-20
载人航天(2021年5期)2021-11-20
人民黄河(2021年4期)2021-04-27
环境与发展(2018年6期)2018-09-17
分析化学(2017年12期)2017-12-25
分析化学(2017年12期)2017-12-25
城市地理(2017年9期)2017-11-02
东方教育(2016年22期)2017-04-07
计算技术与自动化(2014年1期)2014-12-12
微型计算机·Geek(2009年3期)2009-12-11
