
一种电力设备红外与可见光配准研究
2022-07-25 09:42曹珊珊
现代计算机 2022年9期
曹珊珊
(沈阳航空航天大学电子信息工程学院,沈阳 110136)
0 引言
在社会飞速发展的同时,电力设备成为人们日常生活中不可或缺的一部分,维持电力设备的安全运行也成为了一个重要课题,定期巡检与维护变电站的正常运转则是其中至关重要的一步。为了进一步解放人工,降低人力成本,目前我国已将变电站自主巡检机器人投入使用,而红外与可见光图像处理及传输技术作为巡检机器人进行电力系统的故障检测关键技术之一展现出了极大潜力。
图像配准的目的在于使两幅图像达到信息上的融合,再结合图像识别深度学习将一个设备不同状态下的信息融合于单个图像中,使设备的信息更加直观化,诊断效率也得以提高。导致电力设备的诊断系统的资源利用率和运行效率较为低下的主要原因是人工处理大量的图像数据时占用了较多的人力资源,因此,为了使自主诊断系统更加高效准确,对电力设备红外与可见光图像的自动配准研究具有重大意义。
1 算法流程
在工程实际中,巡检机器人和无人机在图像取景时,由于传感器装配差异及拍摄视角,距离和光照等客观因素,拍摄图像间难免出现清晰度及视角差异等问题,进而导致配准准度降低,最终无法准确匹配红外与可见光图像。
针对以上问题,本文提出一种基于轮廓特征的红外与可见光配准方法。该方法使用基于SUSAN+CSS 算法的角点检测方法来进行特征点提取,在图像轮廓上提取特征点并将轮廓中线特征方向作为特征点的主方向,以此解决红外与可见光图像之间存在视角差异的问题,获得正确的特征匹配点,最后使用本文算法进行特征匹配,筛选出正确匹配的特征点,得到配准图像,本文算法流程如图1所示。
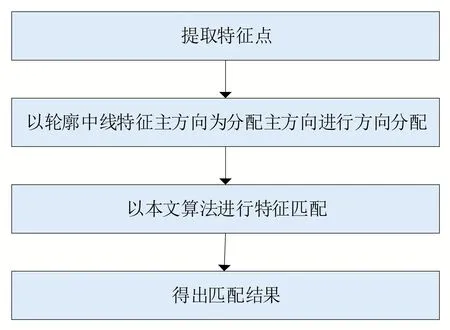
图1 算法流程
2 算法实现
当红外和可见光图像在拍摄时因客观因素导致拍出的图像存在视角差异时,现有的主方向分配算法的配准精度较低,进而导致无法准确匹配红外与可见光图像。针对此问题,在方向分配与匹配算法上进行改进,本文提出一种新的分配方法,由图像轮廓中线来决定主方向。
2.1 方向分配
平面上任意一条曲线的曲率定义式写作下式:
图像的轮廓曲线Γ为一种平面曲线,其坐标集合可定义为式(3):

因轮廓曲线Γ中存在噪声,所以在计算其曲率前需要先对Γ进行平滑滤波,式(4)中G为高斯核函数,⊗为卷积运算符号,最终可得到轮廓曲线Γ的曲率,如式(5)。



将此方向向量定义为特征点的主方向:


同一特征点在不同尺度下的采样得到的轮廓在λ和λ以上述取值后得到相似结果,使得三角形中线指向的方向向量方向相同。
2.2 匹配算法
将红外图像与可见光图像进行特征点提取后,理论上得到的所有能够正确匹配的特征点连线长度相等,且倾斜角度一致,错误匹配的特征点则不然。这些错误匹配的特征点的存在,是由于红外图像与可见光图像之间经常存在相对旋转,为了得到红外图像与可见光图像之间的精准匹配,需要筛选出正确的匹配点。
本文采用双边匹配方法进行匹配,可获得候选匹配特征点集合,见式(11),其中n为匹配点对数。
假设红外图像相对于可见光图像存在旋转角度为∅,将红外图像匹配点旋转负旋转角度后缩放于可见光图像尺度,可得旋转变换矩阵与红外候选匹配点如下:
匹配特征点连线后得到的长度与倾斜角记为式(13),为红外图像横向分辨率:


将区间[0,360°)平均分为36份,每份角度为10°,将每份所包含的Δ中的元素数量作出统计,可以得到包含元素数量最多的区间,将此区间的中间值作为旋转角∅,代入式(13)后可求出对应的与。
3 实验与结果分析
3.1 实验平台与参数设置
本实验硬件仿真环境为Intel(R)Core(TM)i5-9400F CPU @ 2.50 GHZ,软件仿真环境为MATLAB R2019b。在以上硬件与软件的基础上,从电力设备图像数据库获取本文需要的红外与可见光图像,调整图像大小为768×576进行仿真实验,采用MATLAB代码实现本文算法。
3.2 实验评价指标
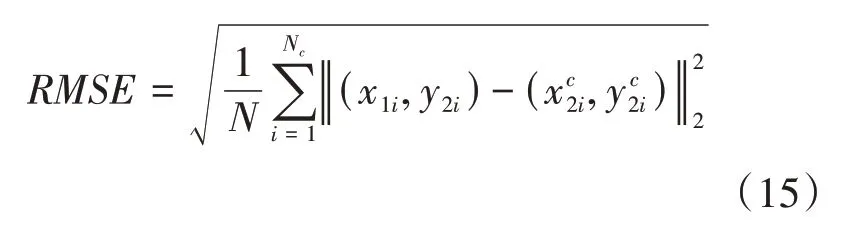


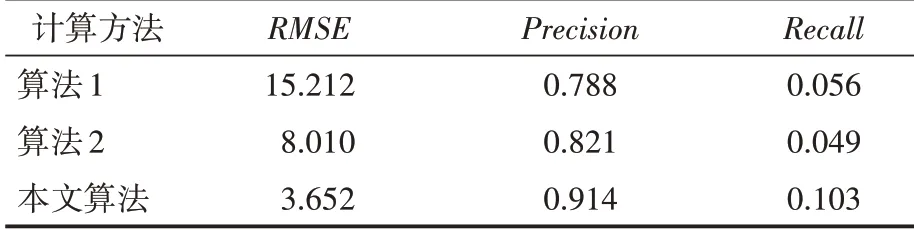
表1 数据集概述
3.3 配准实验结果
按本文算法进行图像配准,结果如图2所示。

图2 第一组图像配准及融合结果
算法一为文献[8]算法;算法二为文献[9]算法。由表格中的评价参数可知,相较于算法一与算法二,本文算法RMSE 值更低,即本文算法匹配点定位精度以及整个配准算法精度较高;Precision 和Recall 值高,即匹配算法区分正误匹配点能力越强,因此可得出结论,本文算法得到的匹配点更为精确,验证了本文算法拥有较优的特征点匹配性能。
4 结语
为了增强配准后图像的特征信息,消除拍摄过程中由视角差异等带来的负面影响,本文采用基于图像轮廓特征的匹配方法可有效筛选出正确匹配点,从而保证红外与可见光图像配准后视角一致,极大地提升了配准后图像的精度。实验数据表明,本文算法与其他算法相比有一定的优势,对变电站巡检机器人进行电力设备故障的自主诊断有研究意义。
猜你喜欢
环球时报(2022-05-23)2022-05-23
科技尚品(2021年11期)2021-12-28
中国电气工程学报(2020年10期)2020-11-06
科技创新导报(2020年3期)2020-05-06
时代英语·高一(2019年5期)2019-09-03
科技资讯(2016年27期)2017-03-01
大众摄影(2015年12期)2016-03-28
读者·校园版(2014年4期)2014-05-14
大灰狼(2009年7期)2009-08-26
舒适广告(2008年9期)2008-09-22
