基于时段优化拼接的多传感器协同探测任务规划*
2022-07-25 03:59:54帅逸仙张明恩程仙垒
火力与指挥控制 2022年4期
董 晨,何 舒,帅逸仙,张明恩,程仙垒
(1.上海机电工程研究所,上海 201109;2.军事科学院系统工程研究院系统总体研究所,北京 100141)
0 引言
在网络化防空反导体系中,各作战单元享有统一的空情态势和制导信息,可实现接力制导、异地制导等协同交战模式,提升复杂对抗环境下的作战效能。在这种模式下,需要对网络中多部跟踪制导传感器的探测任务进行合理规划,实现对目标的协同探测,为各作战单元及时、高质量地提供制导信息,充分发挥各作战单元的作战能力。
多传感器协同探测主要解决复杂对抗条件下对目标的协同跟踪与引导问题,即满足传感器资源约束,按一定规划准则,在合适时间选择合适传感器对目标进行跟踪,且在目标穿越不同传感器探测空域时,确定交/接班传感器、引导时机等信息,保证对目标的连续跟踪。针对上述问题,目前已开展相关的研究工作,主要思路是将作战过程划分为若干时间段,在每一时间段内根据传感器性能及运用限制等约束,分配传感器资源,即求解传感器-目标分配问题,得到各传感器对目标的探测序列。采用整数规划、多智能体理论、智能优化算法、强化学习、协方差控制、隐马尔科夫模型和信息熵等解决传感器任务规划问题,实现探测精度最高、协同探测效能最大等目标,保证多传感器协同探测时的探测任务有序执行。
在网络化防空反导作战中,多传感器协同探测除需满足传感器性能及运用限制等约束外,对各目标的连续探测时间还需满足作战单元与该目标交战的信息保障时间要求,使作战单元能够及时完成火控解算、导弹发射及制导、杀伤评估等一系列交战流程;同时,防空反导作战节奏较快,要求快速生成多传感器协同探测任务,及时形成制导信息,使作战单元尽早拦截目标。这对多传感器协同探测任务规划提出了新的要求。
本文研究一种基于时段优化拼接的多传感器协同探测任务规划方法,将作战过程中多个时间段上的传感器-目标分配问题转化为“传感器- 目标”空间上的传感器工作时段优选和拼接问题,采用分枝定界法进行求解,使对各目标的连续探测时间满足信息保障时间要求,同时满足传感器资源限制、对目标探测连续性、传感器接力探测交接班过渡时间等约束。在传感器目标通道和目标数量较多的情况下,该方法能够减少任务规划问题求解的工作量,有助于快速形成多传感器协同探测计划,对防空反导作战有较好的适应性。
1 基于时段拼接的探测任务快速规划问题
本文研究的多传感器协同探测任务规划问题,是在获得目标预警信息并估计其航迹、计算各传感器对各目标的可探测时段的基础上,以保证对各目标的连续探测时段满足要求为目标,满足传感器资源限制、对目标探测连续性、传感器接力探测交接班过渡时间等约束,规划各传感器对目标的探测时段,形成多传感器协同探测计划。
将多传感器协同探测任务规划问题转化为图1所示的“传感器- 目标”空间上的传感器工作时段优选和拼接问题。图中,T 代表目标、S 代表传感器、两端为圆点的实线代表传感器对目标的探测时段。从各传感器对目标的可探测时段内截取合适的时段,拼接形成对目标的探测时段,满足前述各项约束,减少任务规划工作量,快速生成以“目标-传感器-探测时段”表示的多传感器协同探测计划。
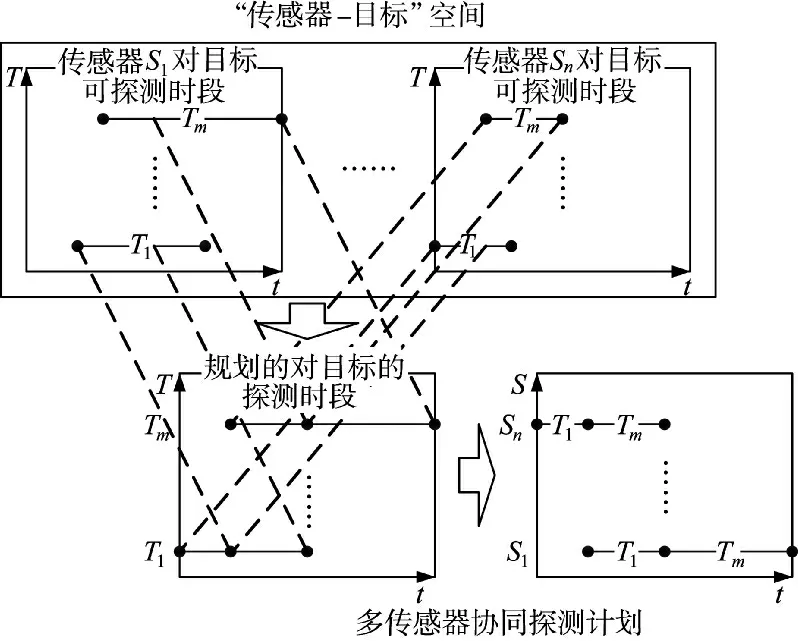
图1 多传感器协同探测任务规划示意图
2 多传感器协同探测任务规划方法
假设多部传感器共有n 个目标通道,一个目标通道只能跟踪一个目标,目标数量为m 个,且对每一个目标,总有不少于一个传感器的目标通道可对其进行跟踪。
2.1 目标可探测时段及期望探测时段
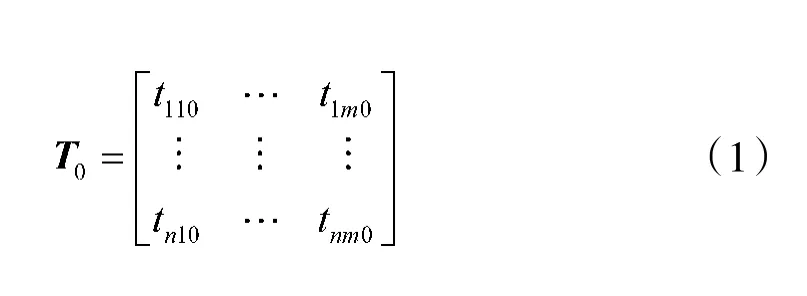
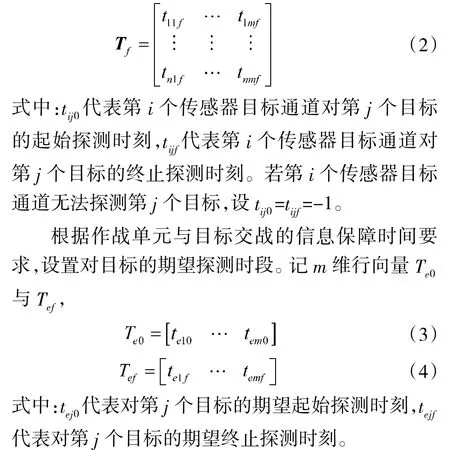
定义传感器对目标的可探测时段为目标从进入到离开传感器探测范围的时间段。根据估计的各目标航迹、速度,以及各传感器的部署位置、探测范围,可判断目标是否进入传感器的探测范围以及进入、离开传感器探测范围的时刻。记n×m 维矩阵T与T,
2.2 目标探测时段优选模型
基于目标可探测时段及期望探测时段,考虑传感器资源限制、对目标探测连续性等约束条件,建立目标探测时段优选模型。
优化变量设为n×m 维矩阵D,
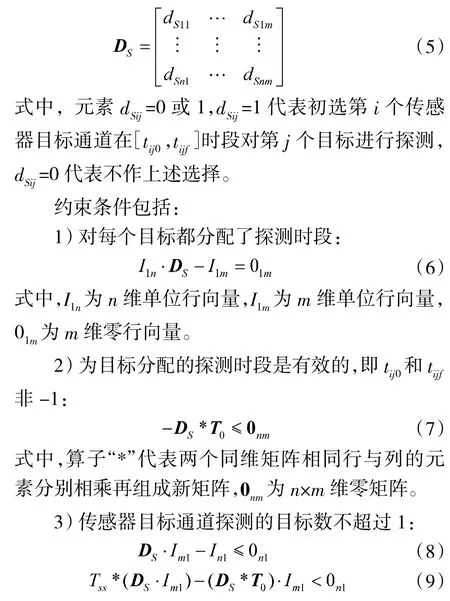
式中,I为m 维单位列向量,I为n 维单位列向量,0为n 维零列向量,T为n 维列向量,如第i 个传感器目标通道已被分配过探测任务,则T的第i 个元素t为第i 个传感器目标通道已分配探测时段的终止时刻;否则,t=0。

式中,算子“//”表示两个同维向量相同行与列的元素分别相除再组成新向量,定义函数Rmin(A,B)为同维行向量A 与B 中相同位置的元素取最小值构成新的向量。
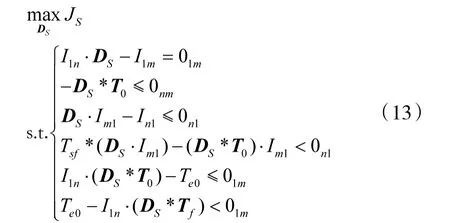
建立目标探测时段优选模型如下:
2.3 目标探测时段优选与拼接
基于式(13)所示的目标探测时段优选模型,可求解得到传感器对目标的探测关系以及探测时段,判断对各目标的探测时段是否满足信息保障时间要求,若不满足则可通过多次目标探测时段优选以及拼接,形成多传感器协同探测计划。
式(13)所示的目标探测时段优选,是一类0-1整数规划问题,可采用分枝定界法进行求解,该方法对约束条件较多的大型问题有一定的优越性。通过求解,可得到传感器对目标的探测关系以及探测时段。求解式(13)得到最优解D,表示传感器对目标的探测关系,若其第i 行、第j 列元素为1,则表示分配第i 个传感器目标通道探测第j 个目标。
对各目标初选的探测时段的起始时刻和终止时刻分别以m 维行向量T与T表示,有

为节约传感器资源,取对目标的探测时段为初选探测时段与期望探测时段的交集,则对第k 个目标(k=1,2,…,m),有

式中,Δt 为两部传感器交/接班的过渡时间,保证传感器接力探测时交接班过渡时间要求得到满足;
2)传感器目标通道工作状态更新,对分配探测任务的传感器目标通道,更新其探测终止时刻;
3)目标数量m 更新,同时调整目标探测时段优选模型中各矩阵和向量的维度及元素,减小优化问题的规模。
基于更新的目标探测时段优选模型,开始新一轮探测时段优选,按上述方法得到传感器对目标的探测关系以及探测时段,重新判断对剩余目标的探测时段是否满足信息保障时间要求。若不满足,则对未满足信息保障时间要求的目标,继续更新目标探测时段优选模型并求解,直至对全部目标的信息保障时间要求均被满足为止,如图2 所示。

图2 目标探测时段优选与拼接流程
依据传感器对目标的探测关系,将对各目标的探测时段按时序拼接,形成多传感器协同探测计划:

式中,S 为负责探测目标的传感器目标通道,方括号代表探测时段,箭头代表接力探测的先后顺序。
3 多传感器协同探测任务规划示例
3.1 验证条件
为验证本文提出的多传感器协同探测任务规划方法,假设有12 部传感器,每部传感器多目标能力为1,目标数量为10 批,将10 批目标分别记为T1~T10,12 个传感器目标通道分别记为S1~S12,两部传感器交/接班的过渡时间Δt=5 s。根据估计各目标航线、各传感器位置及性能,计算目标可探测时段起始时刻和终止时刻如表1 和下页表2 所示。
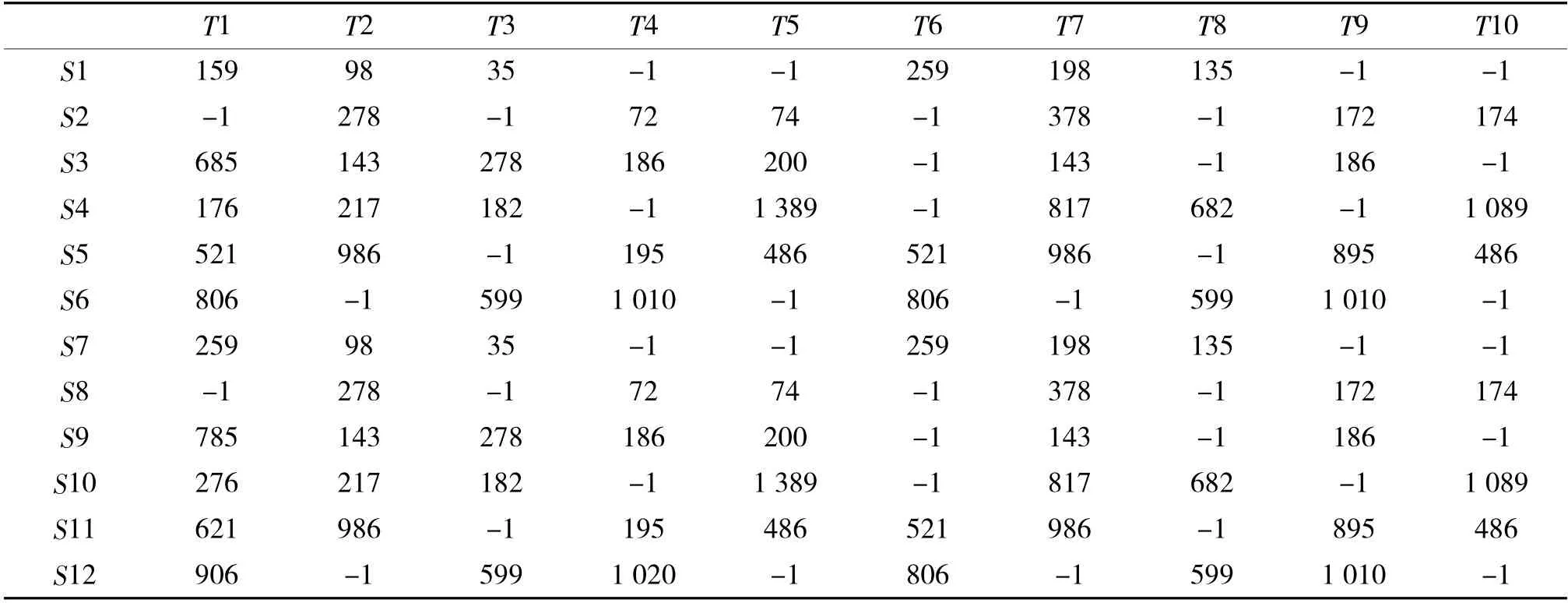
表1 目标可探测时段起始时刻(单位:s)
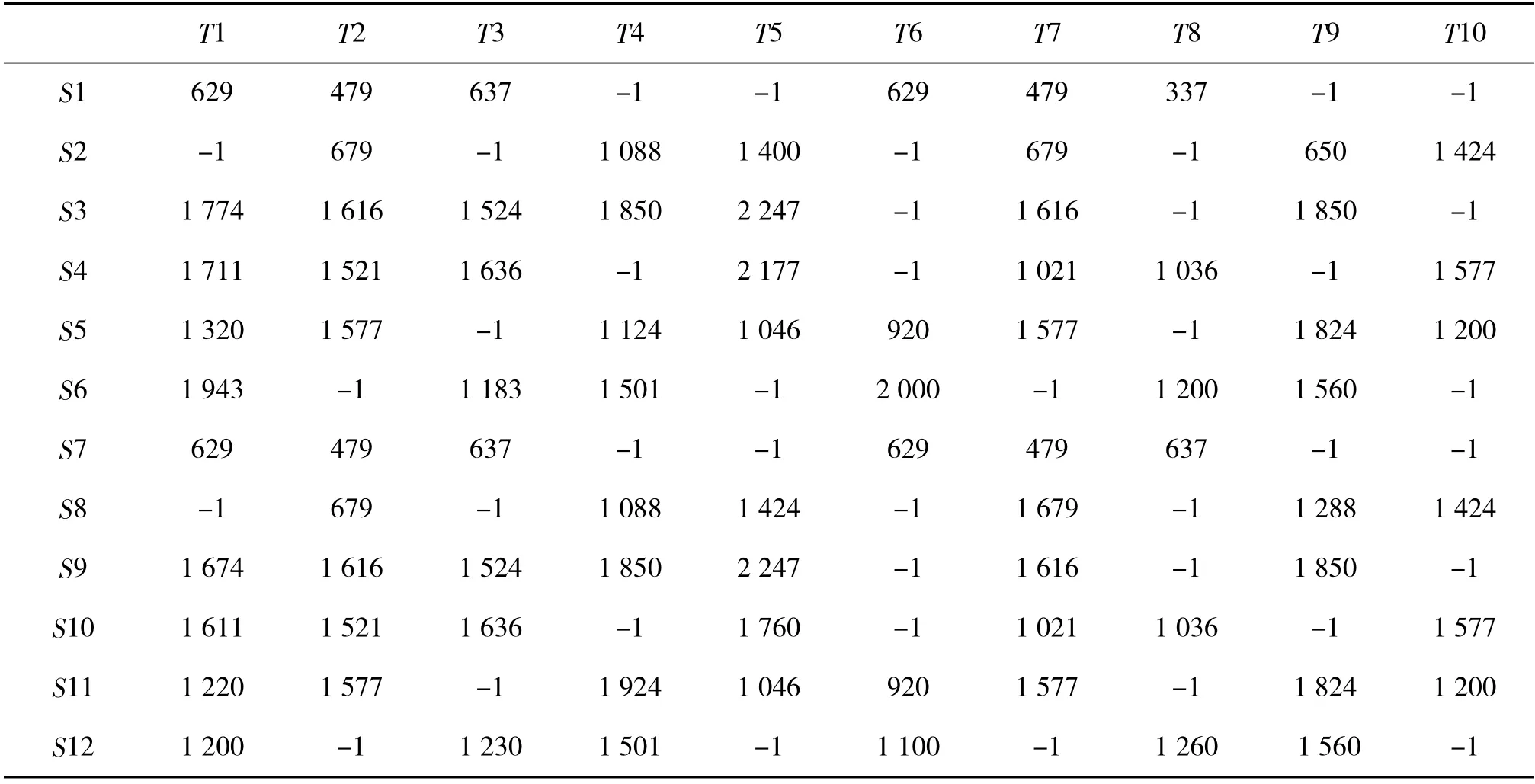
表2 目标可探测时段终止时刻(单位:s)
假设两种交战方案,根据不同交战方案下作战单元与目标交战的信息保障时间要求,分别设置对各目标的期望探测时段,其起始时刻和终止时刻分别如表3 和表4 所示。

表3 交战方案1 下的目标期望探测时段(单位:s)

表4 交战方案2 下的目标期望探测时段(单位:s)
3.2 结果及分析
3.2.1 交战方案1
依据表3 规定的目标期望探测时段,采用本文提出的方法,通过两次目标探测时段优选,得到表5所示的多传感器协同探测计划。对各目标的探测时段以及各传感器的工作时段如下页图3 所示。

图3 交战方案1 协同探测计划示意图

表5 交战方案1 多传感器协同探测计划
通过两次目标探测时段优选得到的表5 中对各目标的总探测时段,满足表3 规定作战单元与目标交战的信息保障时间要求。其中,目标T1 由传感器目标通道S4 与S6 接力跟踪,目标T5 由传感器目标通道S2 与S10 接力跟踪,目标T6 由传感器目标通道S1 与S5 接力跟踪,目标T8 由传感器目标通道S7 与S12 接力跟踪。传感器交/接班均满足5 s 的过渡时间要求。
在图3 中,蓝色实线代表首次目标探测时段优选得到的探测时段,红色实线代表第2 次目标探测时段优选得到的探测时段,每一段连续的实线代表对一个目标的探测时段。由图3(a)可见,目标T1~T10 均被传感器跟踪,且对各目标的总探测时段是连续的。由图3(b)可见,各传感器目标通道在任一时刻探测的目标数不超过1 个,满足传感器多目标能力的限制,多传感器协同探测的各项约束均被满足。
在本场景下,采用文献[4]给出的方法,需要求解25 次优化问题,每次求解的优化变量数均为120个。本文研究的方法求解2 次优化问题,优化变量的数量分别为120 个和48 个,减小了任务规划问题求解的工作量。
3.2.2 交战方案2
依据表4 规定的目标期望探测时段,采用本文提出的方法,通过3 次目标探测时段优选,得到表6所示的多传感器协同探测计划。对各目标的探测时段以及各传感器的工作时段如图4 所示。

图4 交战方案2 协同探测计划示意图
通过3 次目标探测时段优选得到的表6 中对各目标的总探测时段,满足表4 规定作战单元与目标交战的信息保障时间要求。其中,目标T6 由传感器目标通道S1、S5 与S6 接力跟踪,其他目标由一个传感器目标通道跟踪即可满足信息保障时间要求。传感器交/接班均满足5 s 的过渡时间要求。
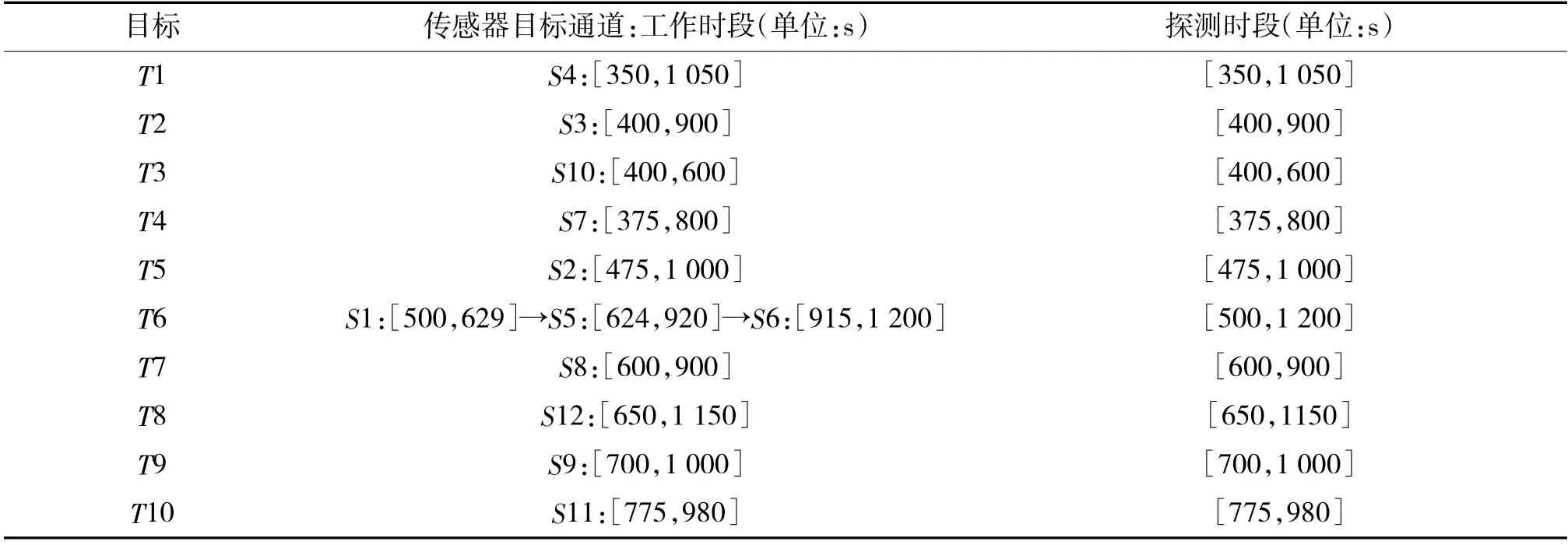
表6 交战方案2 多传感器协同探测计划
在图4 中,蓝色实线代表首次目标探测时段优选得到的探测时段,红色实线代表第2 次目标探测时段优选得到的探测时段,绿色实线代表第3 次目标探测时段优选得到的探测时段,每一段连续的实线代表对一个目标的探测时段。由图4 可见,各目标均被传感器跟踪,对各目标的总探测时段是连续的,各传感器目标通道在任一时刻探测的目标数不超过1 个,多传感器协同探测的各项约束均被满足。
在本场景下,采用文献[4]给出的方法,需要求解25 次优化问题,每次求解的优化变量数均为120个。本文研究的方法求解3 次优化问题,优化变量的数量分别为120 个、12 个、12 个,同样减小了任务规划问题求解的工作量。
4 结论
本文研究了基于时段优化拼接的多传感器协同探测任务规划方法,以满足作战单元与目标交战的信息保障时间要求为目标,在考虑传感器资源限制、对目标探测连续性、传感器接力探测交接班过渡时间等约束的情况下,生成多传感器协同探测计划。在假设的条件下,验证本文提出的方法,生成的多传感器协同探测计划满足各项约束条件,且满足信息保障时间要求。与已有的方法进行对比,本文提出的方法减小任务规划问题求解的工作量,有助于快速形成多传感器协同探测计划,对防空反导作战有较好的适应性。
猜你喜欢
人民交通(2021年17期)2021-09-09 05:50:00
科学大众(2020年23期)2021-01-18 03:09:08
娃娃画报(2019年10期)2019-12-17 08:02:09
诗潮(2019年8期)2019-08-23 05:39:48
启蒙(3-7岁)(2019年3期)2019-04-03 01:39:28
汽车观察(2019年2期)2019-03-15 06:00:50
中国生殖健康(2019年8期)2019-01-07 01:18:20
中国卫生(2016年5期)2016-11-12 13:25:26
发明与创新(2015年33期)2015-02-27 10:40:10
西南军医(2015年5期)2015-01-23 01:25:07