基于多相风力发电系统的容错控制策略研究
2022-07-23 10:45周诗嘉杨光源彭光强武霁阳辛清明
中国电力 2022年7期
周诗嘉,杨光源,彭光强,武霁阳,辛清明
(1.南方电网科学研究院有限责任公司,广东 广州 510080;2.中国南方电网有限责任公司超高压输电公司检修试验中心,广东 广州 510663)
0 引言
能源与社会经济发展息息相关,随着化石能源日益衰竭,能源危机日益严重,探索一条能源可持续的发展道路迫在眉睫。近年来,风能作为一种可再生能源,具有安全、清洁、储量丰富、应用技术相对成熟的特点,其增长速度超过了所有其他可再生能源[1-3]。在中国、美国和欧洲等部分地区,风电已成为重要和决定性的能源[4-5]。
多相电机具有低压大功率输出、低转矩脉动、容错性高等优势[6],特别适合应用于风力发电、电动汽车、航空航天等领域[7-10]。目前,国内外对多相电机的研究多集中舰艇、电动汽车等驱动领域,但将多相电机应用于风力发电领域却鲜有研究。
多相电机的高可靠性是系统稳定运行的前提。复杂工况下,针对多相电机可能产生的故障设计相应的容错控制策略,使其能够带故障运行成为多相电机领域的一个重要议题。目前,多相电机常见故障大致可以分为3类:传感器故障、功率变换器故障和电机绕组故障[11]。对于传感器故障,可以采用传感器冗余或是状态观测器代替传感器信号实现容错控制[12]。变流器故障是指功率开关管发生直通或开路故障,大多数处理办法是将其视为缺相故障进行处理。绕组故障中的开路故障和短路故障也都可以转化为缺相故障。对于缺相故障,其容错控制思想大多基于故障前后磁动势不变原则和转矩不变原则对非故障相电流进行重构。文献[13]对一相开路双三相永磁同步电机进行了数学建模,采用定子铜耗最小矢量控制策略,实现了电机缺相状态下的稳定运行。文献[14]以限制绕组最大输出电流作为约束条件,提出了基于分组控制方式的容错控制策略,可实现自动切除故障单元,电机系统在故障状态下的降额运行。
基于以上研究,本文提出多相直驱永磁同步发电机经三相桥式不控整流器以及隔离型DC/DC变流器,经串联型半桥子模块并入高压直流电网的拓扑结构,该串联型半桥子模块与单相模块化多电平变流器(modular multi-level converter,MMC)的结构相同[15-18]。研究其控制策略,特别是当系统发生并联隔离型DC/DC变流器开路故障时,对系统能量传输机理进行分析。基于最大风能捕获以及机侧网侧能量传输平衡的原则,对各套三相桥式不控整流器的输出电流参考值进行重新整定,采用转速外环和电流内环的双环控制实现最大功率点跟踪(maximum power point tracking, MPPT)控制以及容错控制;采用均流控制器和子模块电容电压反馈控制器实现正常相输出功率均衡,避免变流器过流。最终,确保变流器故障下,系统两侧功率平衡以及各并联隔离型DC/DC变流器功率平均分配,提高了系统的可靠性。
1 多相风力发电系统拓扑结构
基于多相直驱永磁同步发电机的风电系统拓扑结构如图1所示。以18相为例,多相直驱式永磁同步发电机包含6套三相绕组,采用不对称的绕组连接方式,2套相邻的三相绕组之间互差10°电角度,可抑制谐波磁动势。由于不对称绕组多相电机的结构特点可将每套三相绕组视为一个独立的对称三相电机,因此,风力发电系统拓扑中,将各套三相绕组分别与一个三相桥式不控整流器的输入端相连,每个三相桥式不控整流器输出端后接N个输入端并联的隔离型H桥DC/DC变流器,每个DC/DC变流器的输出端与一个MMC半桥子模块相连,所有的MMC半桥子模块和一个电感L依次串联。该串联电路的输出端与高压直流电网相连,并联的DC/DC变流器个数N由高压直流电网的电压Udc、多相风机的相数nphase和三相桥式不控整流器直流侧输出电压Uo决定,可以表示为
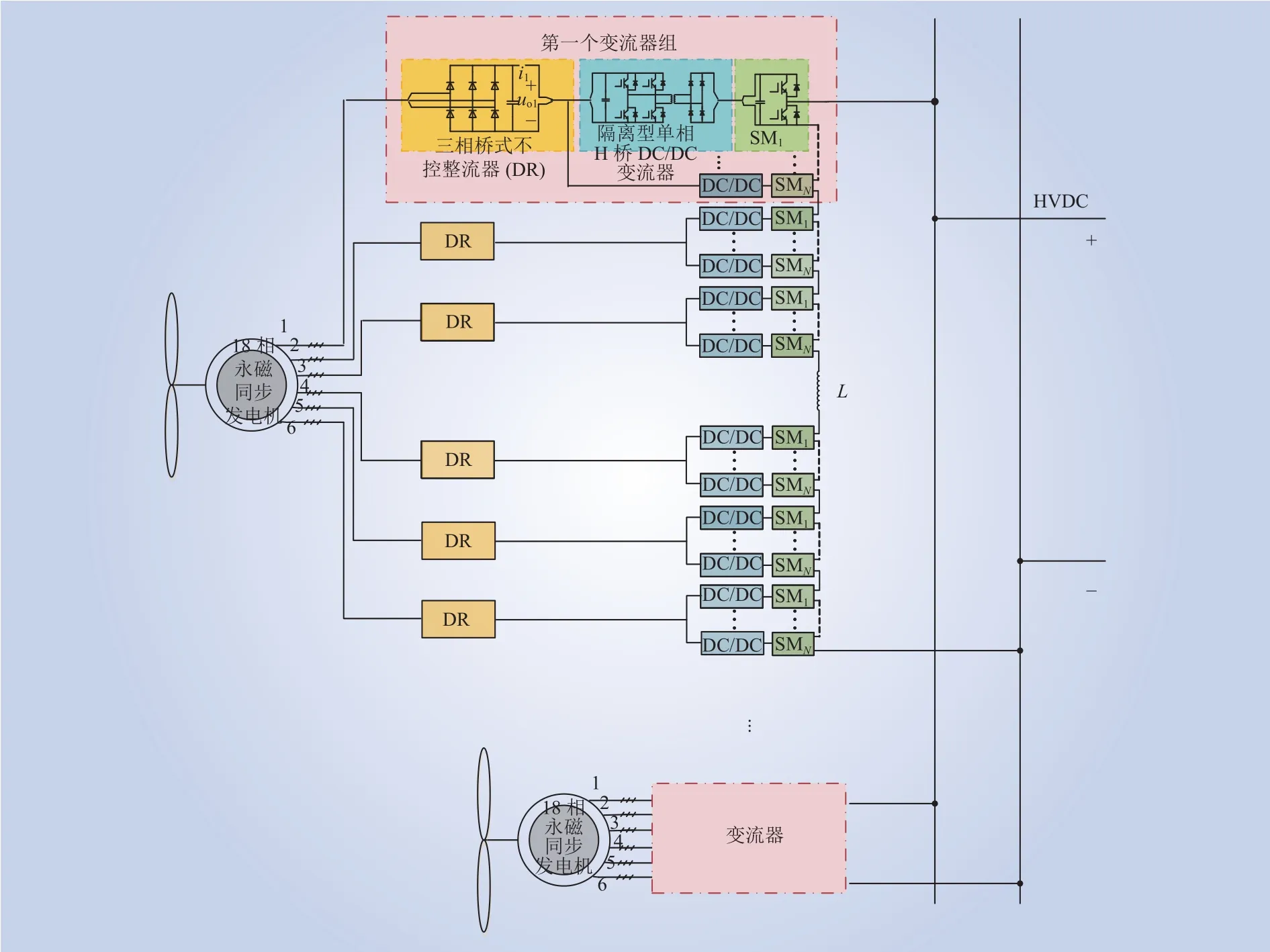
图1 风力发电系统拓扑结构Fig.1 Topology of wind power system

此方法仅适用于相数为3的整数倍的情况。为提高系统的容错性能,高压直流电网侧电压可以设为所有MMC半桥子模块电压之和的5/6倍,在某一套三相绕组发生故障后仍能保证系统正常运行。
2 控制策略
2.1 MPPT控制
采用MPPT控制的目的是为了实现风能的有效捕获和利用[19-21]。传统三相电机实现MPPT控制按照后接变流器类型不同可分为矢量控制和控制DC/DC变流器占空比的方式。对于多相直驱式永磁同步发电机来说,若对所有相进行统一的矢量控制,矢量数量急剧增大,控制变得复杂;若分成多套三相绕组进行独立的矢量控制,则必须解决各套之间的同步、磁链耦合问题。故本文将传统三相电机后接二极管整流器和DC/DC变流器结构的MPPT控制应用于多相电机中,通过控制三相桥式不控整流器的输出电流,进而调节DC/DC变流器占空比以控制端电压,从而实现最大功率跟踪的目的。
为实现最大风能捕获,应保证叶尖速比为其最优值,因此电机转速参考值ωref为

式中:R为风机叶片半径;v为当前风速;λopt为最佳叶尖速比。
当电机实际转速比转速参考值低时,需要降低电机输出电流以增大电机转速,反之提高电机输出电流使转速降低,因此,将ωref与实际转速ω作差后通过转速PI控制器进行调节,得到电流参考值iMPPT为

式中:KP1、KI1分别为转速PI调节器的比例系数和积分系数。
2.2 容错控制
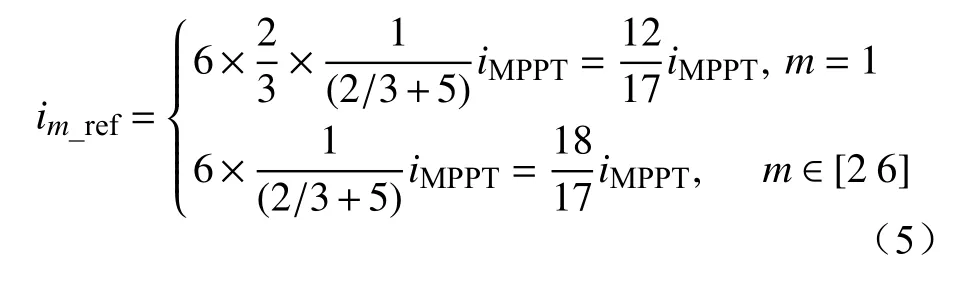
当系统正常工作时,第m套三相桥式不控整流器输出侧电流参考值im_ref为

式中:m=1,2,···,6。
当多相电机某一套绕组连接的隔离型H桥DC/DC变流器发生故障时,该隔离型H桥DC/DC变流器被切除,输入电流即为0,继续使用正常工作状态的电流分配机制,则风机侧传输到网侧的功率会减少。因此,为保证风能的最大功率追踪,机网侧能量平衡,将故障隔离型H桥DC/DC变流器负责传输的这部分能量平均分配给其余的6N-1个正常的隔离型H桥DC/DC变流器。由于隔离型H桥DC/DC变流器都是并联在三相桥式不控整流器输出端,传输的功率和流经隔离型H桥DC/DC变流器的电流成正比。因此,以18相风机带18个子模块为例,假设第一套绕组的第一个隔离型H桥DC/DC变流器发生故障,分别对故障和正常隔离型H桥DC/DC变流器所连的三相桥式不控整流器输出侧电流参考值进行如下设定。
检测三相桥式不控整流器输出电流im,将im_ref与im作差后通过PI调节器进行调节,得到第m套绕组连接的第j个隔离型H桥DC/DC变流器(j=1,2,···,N)DCmj调制信号的初始量Dm为

式中:KP2、KI2分别为三相桥式不控整流器输出电流PI调节器的比例系数和积分系数。
2.3 均流控制
均流控制的目的是使每一套三相桥式不控整流器输出侧电流在N个并联隔离型H桥DC/DC变流器之间平均分配,每个变流器传输功率相同,散热均匀。
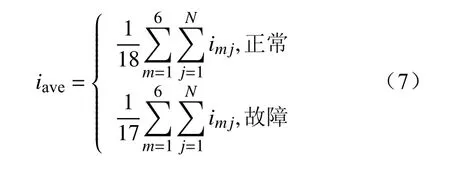
分别检测隔离型H桥DC/DC变流器DCmj的输入电流imj,系统正常工作还有故障情况下隔离型H桥DC/DC变流器的电流平均值计为
将iave和imj送入均流PI调节器,得到DCmj调制信号的第一附加量ΔDmj_1为

式中:KP3、KI3分别为均流PI调节器的比例系数和积分系数。
检测隔离型H桥DC/DC变流器输出端连接的子模块电容电压值Umj,将子模块电容电压参考值Uc_ref与Umj作差,差值送入均压P调节器,得到DCmj调制信号的第二附加量ΔDmj_2为

式中:KP4为均压P调节器的比例系数。
将DCmj调制信号的初始量Dm、第一附加量ΔDmj_1、第二附加量ΔDmj_2相加起来可以得到DCmj的调制信号Dmj为
将Dmj与三角载波比较后得到DCmj的触发脉冲信号。
2.4 直流并网控制
系统稳定的前提是保证输入输出功率平衡,直流并网中的可控量为并网电压和并网电流,其中并网电压一般为确定值,因此并网电流与输出功率呈比例关系,可通过控制并网电流以调节系统输出功率。在能量从机侧传输到高压直流侧的过程中,子模块电容起到了能量缓存的作用,各子模块电容的充放电过程表征了能量从机侧传输到直流电网侧的过程,因此考虑以子模块电容电压为外环目标、并网电流为内环目标的控制策略。当子模块电容电压平均值大于其额定值时,应控制并网电流增大,向高压直流电网侧传输更多的能量,反之应降低并网电流以减少向高压直流电网侧传输的能量。
检测子模块电容电压Uci,计算子模块电容电压平均值Uc_ave为
将Uc_ref与Uc_ave作差后通过稳压PI调节器进行调节,得到并网电流参考值idc_ref为

式中:KP5和KI5分别为稳压PI调节器的比例系数和积分系数。
检测并网电流idc,将idc_ref与idc作差后通过并网电流PI调节器进行调节,得到并网电压参考值Udc_ref为

式中:KP6和KI6分别为并网电流PI调节器的比例系数和积分系数。对Udc_ref采用最近电平逼近的方式进行调制,得到各半桥子模块的触发脉冲信号。风力发电系统控制框图如图2所示。
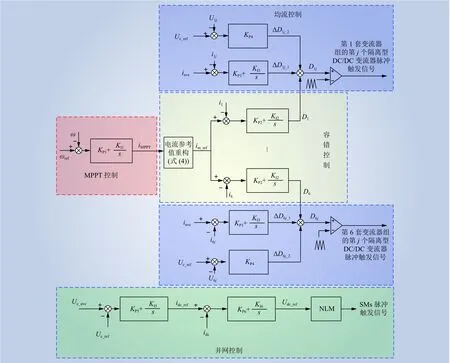
图2 风力发电系统控制框图Fig.2 Control block diagram of wind power system
3 仿真分析
为验证所提控制方法的可行性,在Matlab/Simulink中搭建基于多相风力发电系统的仿真模型,系统仿真参数如表1所示。
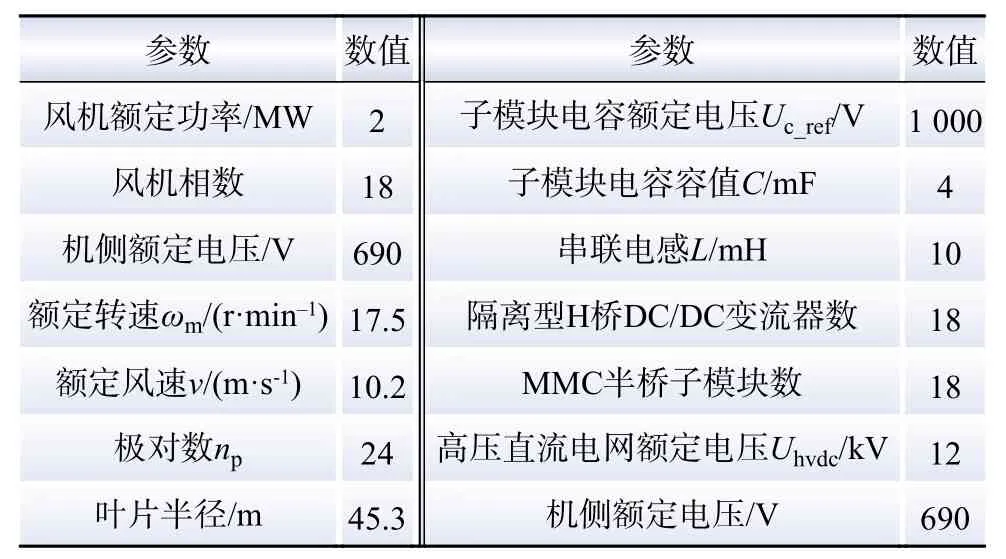
表1 系统仿真参数Table 1 System simulation parameters
3.1 正常工况
在额定风速10.2 m/s的情况下,正常工况仿真结果如图3所示。
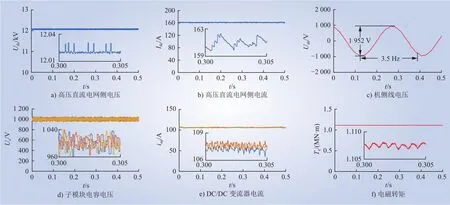
图3 额定工况仿真结果Fig.3 Simulation results under rated conditions
图3a)为直流侧电压波形,可以看出波形呈阶跃型,电压为12.02~12.03 kV,这意味着投入的子模块数量为12~13。当并网电流大于其参考值时,投入12个子模块以降低传输电流,反之,投入13个子模块以增大并网电流。考虑到电流变化时的电感电动势,投入13个子模块时,并网电压会略低于这13个子模块电容电压之和,导通12个子模块时,并网电压会略高于这12个子模块电容电压之和。直流侧电压波形略大于额定值12 kV,这是考虑到直流输电过程中,输电线路上会产生小部分压降。直流侧电流波形如图3b)所示,其幅值稳定于161 A,纹波在0.25%之内,波动较小。网侧吸收功率为1.936 MW,传输效率为96.8%。由于本拓扑是直流并网,系统的无功主要由电压纹波和电流纹波带来,从图3b)中还可看出,无功大约为800 MV·A,占总容量0.04%,可忽略不计。
图3c)为18相直驱永磁同步发电机第一套三相绕组的线电压波形,可以看出波形正弦特性较好,其幅值约为976 V,有效值约为690 V,基波频率为3.5 Hz。图3d)为MMC半桥子模块电容电压波形,电容电压基本稳定在额定值1000 V,纹波大小为8%。
图3e)为并联隔离型H桥DC/DC变流器的电流波形。由图3e)可见,流经各个隔离型H桥DC/DC变流器的电流幅值相差范围约为1 A,这得益于采用了均流控制。图3f)为电磁转矩波形。其幅值在 1.1075 MN·m 上下波动,纹波小于 0.15%,纹波频率为126 Hz,为36倍频。这是由于系统采用18相电机,其定子电流低次谐波产生转矩脉动都相互抵消的缘故。
3.2 故障工况
为了验证风力发电系统容错控制策略的有效性,在系统稳定运行0.5 s时,将第一套变流器组中的第一个并联隔离型H桥DC/DC变流器切除以模拟故障工况。采用提出的容错控制对系统进行仿真,仿真结果如图4所示。
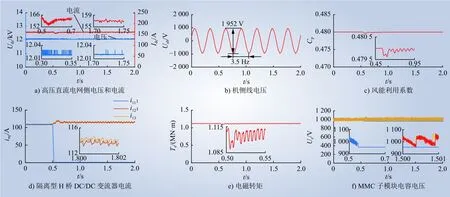
图4 故障工况仿真结果Fig.4 Simulation results under fault conditions
图4 a)为高压直流电网侧电压和电流波形。电压幅值在故障前后基本不变,为12.025 kV。电流在0.5 s发生故障后稍微有所下降,幅值降低了约9 A,这是由于故障隔离型H桥DC/DC变流器突然切除引起传输功率的降低,大概0.1 s后电流波形回复稳态。图4 b)为多相直驱永磁同步发电机的线电压波形,发生故障后,其幅值基本保持不变。
风能利用系数如图4 c)所示,由于故障造成变流器传输的功率有所波动,风能利用系数也在0.48附近微小波动,由于纹波相对较小,对系统的影响几乎可以忽略。图4 d)所示为故障下第一套变流器组的隔离型H桥DC/DC变流器电流。由于第一个隔离型H桥DC/DC变流器被切除,因此其输入电流i11减小为0,其他正常工作的隔离型H桥DC/DC变流器电流幅值从108 A增加到114 A,这是由于使用容错控制后,故障变流器需传输的功率被均分到了正常工作变流器上。
电磁转矩波形如图4 e)所示,电磁转矩纹波在故障后轻微增大,这是因为故障变流器被切除后,故障电流映射到绕组电路引起,但由于单套变流器绕组的电磁转矩远小于总的电磁转矩,因此,故障电流引起的转矩波动也相对较小。图4 f)为子模块电容电压,正常隔离型H桥DC/DC变流器连接的子模块电容电压在故障前后都稳定于参考值,故障隔离型H桥DC/DC变流器连接的子模块电容电压在故障后基本稳定于960 V,这是由于当其电压较大时,根据最近电平调制的原理,子模块投入进行放电,当其降低到最小值时会保持切除状态,因此稳定于960 V。
4 结论
本文提出了一种多相直驱永磁同步发电机经三相桥式不控整流器和隔离型H桥DC/DC变流器并入高压直流电网的拓扑结构。针对系统中并联隔离型H桥DC/DC变流器发生故障的问题,通过分析机侧网侧能量传输机理,对故障后的三相不控整流器的输出电流参考值进行了重新整定,提出了相应的容错控制方法。实现了系统在故障工况下的稳定运行,提高了系统的可靠性。通过仿真对系统故障工况下容错控制策略的有效性进行了验证。
猜你喜欢
电气技术(2022年6期)2022-06-27
防爆电机(2022年3期)2022-06-17
河北农机(2021年12期)2022-01-06
科学技术创新(2021年21期)2021-07-30
铁道机车车辆(2021年3期)2021-07-12
科学家(2021年24期)2021-04-25
防爆电机(2020年5期)2020-12-14
防爆电机(2020年3期)2020-11-06
电子制作(2019年10期)2019-06-17
电子制作(2019年23期)2019-02-23