卫星卷绕式柔性太阳电池阵关键技术研究
2022-07-22 06:32:38张伟兰志成吴致丞
电子技术应用 2022年6期
张伟,兰志成,吴致丞
(中国电子科技集团公司第十八研究所,天津 300384)
0 引言
随着航天任务的逐渐增多,低轨卫星网络快速发展。卫星通信将在6G 通信中承担重要角色[1-4],并发挥重要作用,通过卫星通信与地面网络的融合,达到全球全域的移动网络覆盖目标,需要发射大批量的卫星星座来实现天基的6G 通信。
整星负载的提高对太阳翼功率的需求越来越大,同时要求太阳翼具有更轻的质量、更小的体积以适应低轨卫星大批量发射部署的任务特点。虽然传统刚性/半刚性太阳阵仍是目前应用最为广泛的形式,但是其体积重量会随着航天器载荷所需功率的增加也成正比地快速增长,较难满足未来星座建设“一箭多星”对于卫星太阳阵高质量比功率及体积比功率需求[5]。针对未来大功率航天器发展需求,轻量化的柔性太阳电池阵具有较大优势。
按照展开方式,空间柔性太阳电池阵可以大体分为3种,分别为:手风琴式、扇形式以及卷绕式[6],均采用柔性薄膜材料作为太阳阵基板。手风琴式以“Z”形折叠的方式收拢,典型型号有国际空间站以及洛克希德·马丁公司的LM2100 卫星平台太阳阵。扇形展开式太阳阵展开后类似于古代的圆形折扇,太阳阵由多个三角形太阳电池毯组成,组合在一起后形成一个接近于圆形的多边形。扇形太阳电池阵已经在毅力号火星车、猎户座、露西号等多个卫星和航天器应用。相比于手风琴式和扇形展开式,卷绕式收拢式太阳阵(Roll-out Solar Array,ROSA)可利用薄壁伸展杆储存的应变能实现在轨展开,从而无需铰链、展开驱动机构,并且收拢体积较小,是未来太阳电池阵的重要发展方向。
1 卷绕式柔性太阳电池阵研制进展
美国DSS(Deployable Space Systems)公司研发了一种新型的卷绕式柔性太阳电池阵——ROSA,整体结构类似于我国古代的卷轴画卷,展开后为矩形结构,如图1 所示。ROSA 主要由与卫星连接结构部分、C 形薄壁式碳纤维伸展杆、太阳电池阵、收拢杆四部分组成,在发射阶段碳纤维杆、太阳电池阵卷绕在收拢杆上,收拢体积小节省火箭空间;太阳翼展开时,碳纤维杆伸展开,将卷绕的太阳电池阵撑开,形成图1 所示的太阳电池翼结构,为卫星提供电能。国外研究中,从原理样机到空间应用,经历了十余年的时间,产品逐渐走向成熟。

图1 ROSA 样机结构示意图
1.1 工程样机研制
2014 年7月,DSS公司完成了20 kW ROSA工程研制模型的研制和全部试验,样机尺寸为6.3 m×13.6 m,结构如图2 所示,面积约为85 m2,采用水平滚动的展开方式。研制的样机是一种整翼模块化的太阳电池阵,采用弹性自展开复合材料杆驱动太阳毯滚卷展开,系统结构简单、可靠性高。该方案在收纳比、质量比功率指标方面具有明显优势。
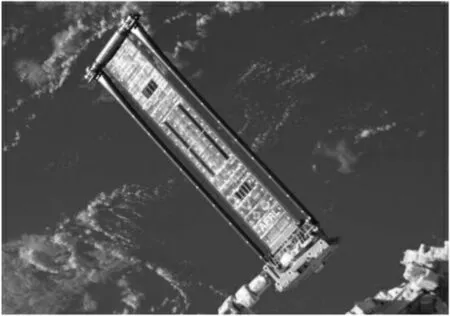
图2 ROSA 样机在轨验证图
2017 年6 月3 日NASA 发射了ROSA实验机,由SpaceX 猎鹰9 号商业补给服务发射到国际空间站,对卷绕式太阳电池阵进行了在轨飞行试验,通过龙飞船将一个尺寸为1.67 m×5.4 m 的ROSA 样机发射至国际空间站,在轨进行了展开、收拢试验,测试展开基频等,并在轨测试了Spectrolab、Solaero 以及Northrup Grumman 三家公司生产的太阳电池产品,成功验证了展开机构以及电池电路等在轨功能[7-8]。
1.2 在轨应用
2021 年6 月20日,国际空间站上其中一副新太阳翼-ROSA 安装并在轨展开,该太阳翼完全覆盖在原有太阳翼阵列上。空间站ROSA 地面收拢状态如图3 所示,展开后太阳阵的尺寸约为6×19 m2。其采用了内径约为45 cm 的卷筒,外径约75 cm。太阳阵的质量比功率约100~120 W/kg,体积比功率≥12 kW/m3。每个太阳阵在轨寿命末期输出功率约20 kW。NASA 计划采用6 个这样的柔性太阳电池阵用于替代现有太阳阵,目前已经完成2 个太阳阵的安装。

图3 国际空间站ROSA
2021 年11 月美国发射了双小行星重定向测试(Double Asteriod Redirection Test,DART)卫星,DART 是由NASA指导,约翰斯-霍普金斯大学应用物理实验室开展的全球第一个行星防御任务,该系统将通过使用航天器撞击小行星的形式来保护地球。DART 飞行器采用了一对ROSA 作为发电系统,单翼太阳阵尺寸约为1.45 m×8.6 m,如图4 所示,寿命初期输出功率大于6.6 kW,据测算,其太阳阵质量体积比功率>25 kW/m3。
ROSA 的质量比功率和体积比功率和整机的设计与总功率相关,其最大质量比功率可达200 W/kg 以上,体积比功率可达40 kW/m3以上。由于ROSA 在重量和收纳体积方面的巨大优势,越来越多的航天任务计划采用此种类型的太阳电池阵,比较典型的有美国载人登月计划-Gateway PPE(Power and Propulsion Element)项目、商业高轨卫星等。
1.3 国内卷绕式柔性太阳电池阵研制进展
中国电科十八所在柔性太阳电池阵的研制方面具有一定的研制基础。在某科学卫星型号上,设计研制了采用柔性薄膜电池、柔性基板和柔性封装的卷绕式全柔性太阳电池阵,最小可卷绕半径约5 cm,如图5 所示。太阳阵质量比功率达230 W/kg,体积比功率达26 kW/m3以上,指标达到国际先进水平。太阳阵设计状态可满足低轨道(600 km)6 个月使用寿命。目前,已经完成了地面试验验证,待命发射。

图5 某科学卫星全柔性太阳翼展开状态(上)及收拢状态(下)
2 关键技术分析
2.1 柔性功率传输技术
刚性太阳电池阵通过圆导线在基板背面对太阳电池阵的每个组件进行汇流,由于在收拢状态下不同板之间有较大间距,多条导线绑扎在一起后不影响整个太阳阵的收拢压紧。而对于卷绕式柔性太阳电池阵,太阳毯在收拢状态下时,层与层之间紧密压紧,如图6 所示,传统导线及其绑扎固定方式将不再适用。
DART 卫星采用了新型扁平化柔性电缆,实现不同柔性太阳电池组件之间的电能量传输与汇流,如图6 所示。太阳阵一端与星体连接,对于卷绕式柔性太阳电池阵的汇流,靠近星体一端流过的电流较大,而远离星体的外边缘电流较小。在柔性电缆的研制过程中,在满足电功率传输的情况下,需综合考虑电缆扁平化、可卷绕以及电缆位置间的关系,做针对性设计。

图6 扁平化柔性电缆
2.2 模块化柔性太阳电池组件技术
在空间太阳电池阵列中,制造成本最高、耗时最长的组件为太阳电池组件,包括:光伏太阳电池、太阳电池的电连接、在太阳电池正面的防护玻璃盖片。将单个太阳电池片通过互连片连接形成电路或电池串,通过粘合工艺将该电路固定到基板上,从而形成模块化太阳电池组件。柔性毯组件由独立但相同的多个模块化组件组成,如图7 所示。在批量生产过程中,模块化组件的实施使得柔性电池毯能够以非常低的成本进行大规模生产,并且在集成和测试活动期间能够快速组装或更换。
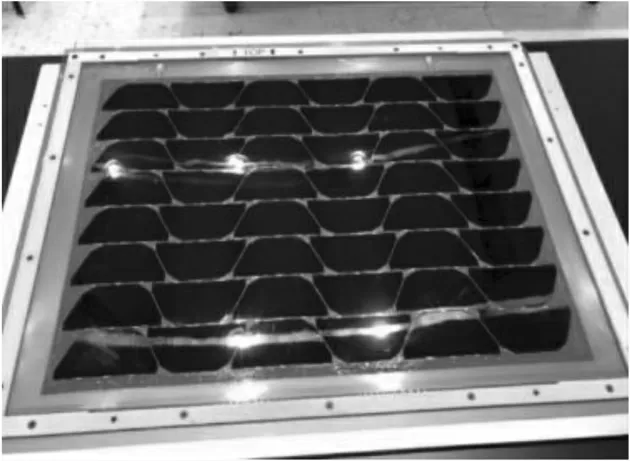
图7 模块化太阳电池组件
在模块化组件制作过程中,需实现太阳电池串在“首尾”片上的汇流及高可靠焊接。需对柔性组件的基板进行合理化设计,电池串之间的汇流材料内嵌于柔性基板中,需解决多层基板的空间大范围温度交变环境适应性问题。对内嵌于柔性基板内的汇流材料进行综合考虑设计,使其既与柔性基板有较稳定的物理连接,又要保证电池串与汇流材料之间能实现稳定的电连接。
2.3 柔性基板技术
ROSA 采用了新型网格式基板,具有高强度、超轻、超薄的特点。采用玻璃纤维材质,基板厚度约50 μm。具备多个交叉股线组成的开放网状结构,简而言之,是一个不连续的张力承载网,如图6 所示。多个分立的薄型紧固件通过粘接的方式将网格基板和模块化组件固定在一起。
紧固件可以很容易地连接或断开连接,以快速组装或从背板上移除模块化组件。电气控制沿着背板的背面布线,并连接至模块化组件正面或背面的裸露电路端。将制造柔性毯式太阳电池阵列组件的生产时间从几个月减少到几天,并提供了重量轻、功率范围宽、可靠性高、收纳比高、可卷曲、热稳定性高等特性。
2.4 柔性展开机构技术
国际空间站ROSA 采用薄壁式伸展杆作为展开结构,其无铰链式空间可展薄壁结构是近年来国际上新研制的可自展开机构,在收拢状态下自然卷绕成圆环状,储存应变能。在轨状态时,利用存储的应变能驱动太阳阵在轨展开,展开后结构变为开口较小的“C”形,具备较大刚度,如图8 所示,具有质量轻、收拢体积小、无需铰链等优势。C 形杆通常采用碳纤维复合材料制作而成,相比于刚性太阳阵及展开机构,具备许多优点,但与整个柔性太阳电池毯连接后,展开过程中存在易松脱,且展开态下刚度相对弱、基频低等问题,制约着该类结构的广泛应用。

图8 C 形薄壁式伸展杆卷绕及展开状态图[9]
作为ROSA 展开机构中最重要构件和最关键组成部分,在C 形杆及其附属机构研制及设计过程中,需解决双臂同步、有序展开过程。采用的C 形杆应具备可精确控制的特性。在柔性太阳电池电路的基础上,统筹考虑伸展杆展开过程不同位置所需展开驱动力差异,以及杆的根部及端部结构强度差异,从而对薄壁伸展杆做系统设计。满足伸展杆不同位置结构强度要求,做到多层卷绕结构自外而内,双臂有序缓慢展开。
2.5 关键技术总结
国外开展ROSA 卷绕式太阳电池阵研究已逾10年,在多颗卫星和航天器上实现了在轨应用。针对ROSA 的研发,我国急需突破多项关键技术。例如,柔性功率传输需突破在轨高可靠扁平化电缆制备与卷绕式布线设计技术;模块化组件需突破高热交变寿命的柔性太阳电池组件设计技术;柔性基板需突破轻重量、大尺寸、高可靠、高收纳比、可卷曲、高热稳定性的柔性基板制备技术;柔性展开机构技术需突破双臂同步、有序展开的高稳定C 形碳纤维伸展杆设计及制备技术。
3 结论
卷绕式柔性太阳电池阵具有质量比功率高、收纳比高、易扩展、可批量生产等特点,成为6G 卫星星座较理想的太阳电池阵方案。本文介绍了卷绕式太阳电池阵的发展历史,分析了研制过程中的一些关键技术,包括柔性功率传输技术、模块化组件技术、柔性基板技术、柔性展开机构技术等。对卷绕式太阳电池阵的研制及未来6G 卫星星座太阳电池阵选型具有借鉴意义。
猜你喜欢
发光学报(2022年7期)2022-08-05 04:41:08
海洋信息技术与应用(2022年1期)2022-06-05 07:38:22
现代装饰(2020年5期)2020-05-30 13:01:56
中国核电(2017年2期)2017-08-11 08:00:56
流程工业(2017年4期)2017-06-21 06:29:50
科技创新导报(2016年1期)2016-05-30 09:38:13
中国塑料(2016年7期)2016-04-16 05:25:55
云南师范大学学报(自然科学版)(2015年5期)2015-12-26 12:46:14
电源技术(2015年5期)2015-08-22 11:18:12
电源技术(2015年7期)2015-08-22 08:49:00