基于ADS-B的飞行数据采集处理系统设计与实现
2022-07-22 08:31:50吴春林蓝德威李宝鹏
火控雷达技术 2022年2期
吴春林 陈 勇 邵 红 蓝德威 李宝鹏
(1.海军航空大学青岛校区 山东青岛 266041;2.海军装备部重大专项装备项目管理中心 北京 100000;3.解放军92074部队 浙江宁波 315000)
0 引言
ADS-B (Automatic Dependent Surveillance-Broadcast, 广播式自动相关监视)[1]是一种基于全球卫星定位系统和利用空地、空空数据链实现交通监控和信息传递的空管监视新技术,它充分融合了通信、定位和导航等多种现代信息技术。装备了ADS-B设备的飞机,可通过数据链向地面和机载接收机广播准确的飞机位置、速度等实时信息,在增强飞行员、管制员风险洞察能力,以及提升整体航空交通安全水平方面发挥着重要作用[2]。因此,深入研究ADS-B技术在提升民用航空交通安全水平方面有着重要意义。
针对ADS-B技术在航空监视中的广泛应用[3],本文设计并实现了一种基于ADS-B的数据采集处理系统,该系统的主要特点如下:
1)该系统通过采集并处理目标的4维位置信息(经度、纬度、高度和时间),能够形成清晰、直观的二维背景地图和探测目标的航迹以及交通态势分布。
2)该系统通过对所采集的ADS-B数据进行冗余点检测删除、漏点检测修正以及异常点识别剔除等数据优化处理,使得优化后的数据能够更为直观、准确地反映出探测目标的航行数据。
3)该系统能够将探测目标数据进行存储记录,从而可以实时重放全部目标的航迹数据记录,并以伪雷达画面实时显示在二维背景地图中。
系统在设计时以获得准确的飞行航迹为目标,以数据信息获取和处理为核心,实现了对ADS-B信息数据的采集、优化和显示功能,为飞机航行数据的分析和研究提供了可靠支撑。
1 总体设计
ADS-B数据的发送和接收处理过程如图1所示,机载ADS-B发射机广播信号,基于ADS-B的数据采集处理系统完成ADS-B数据信息的接收、处理和显示。该系统主要分为三个模块:
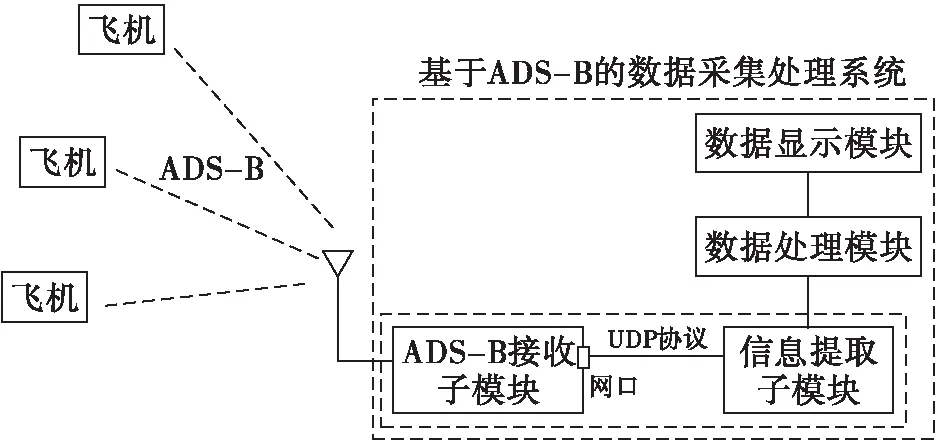
图1 ADS-B数据的发送和接收处理过程
1) 数据采集模块:由ADS-B接收子模块和信息提取子模块构成,以实现ADS-B数据信息的解析、有用信息的提取和存储。
2) 数据处理模块:对数据采集模块传过来的数据进行冗余点、漏点和异常点处理,并将处理后的数据存储在数据库中。
3) 数据显示模块:将从数据采集模块获得的原始数据信息和从数据处理模块得到的处理后数据信息进行显示,以便于飞行航迹和航班信息的直观展示。
2 数据采集模块
该模块主要完成ADS-B信号的接收和ADS-B信号中有用数据信息的提取。其中信息提取的关键是对ADS-B数据帧结构有充分的理解,下面就对其进行介绍。
ADS-B数据帧由多个ADS-B数据块组成,每个数据块包含各个域值[4-5],如图2所示。由图2可知,单条ADS-B报告共14字节,112Bit。一般来说该报告被分为5个大的数据块。在数据采集模块中,我们主要使用的是ADS-B帧的ICAO地址域和ME消息域数据信息。ICAO地址域是单条ADS-B报告的Bit9-Bit32,共24个比特位,对同一航空器而言ICAO地址域具有唯一性;ME消息域是单条ADS-B报告的Bit33-Bit88,共56个比特位,该域包含航空器的诸多元素项。
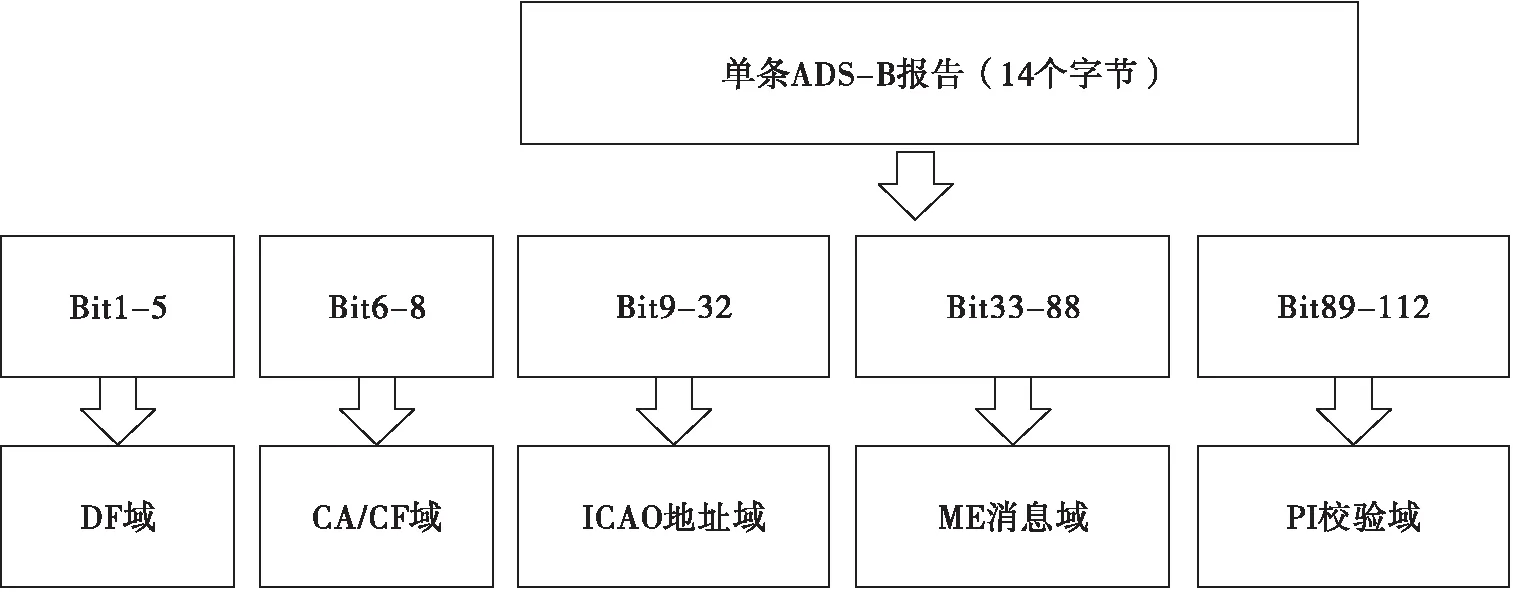
图2 软件设计方案
在接收到的ADS-B信号进入数据采集模块后,该模块就会从ICAO地址域和ME消息域中获取飞机的ICAO域代码、所处位置的经纬度、飞行高度等系统后续处理所需要的数据,随后将上述信息传入数据处理模块并存入数据库中。
3 数据处理模块
在ADS-B数据信息传输过程中,由于传输损耗、地形阻挡和电磁干扰等因素的影响, ADS-B接收子模块接收到的数据信息可能会存在很多错误,例如出现冗余点、漏点和异常点等。因此,为了正确显示航班信息和飞行航迹,必须对接收到的ADS-B数据信息数据进行处理,来尽可能消除前述错误[6-7]。
3.1 数据信息冗余点、漏点和异常点处理
本系统对数据信息冗余点、漏点和异常点这三种典型的数据错误点都进行了处理,数据处理流程如图3所示,并予以描述。

图3 数据处理流程图
1)数据输入:将采集的ADS-B数据输入到数据处理模块。
2)冗余点处理:系统采集的ADS-B数据中可能会存在多个含有相同信息的数据点,即冗余点。这些点不能提供有用信息,反而会额外占用系统的存储和计算资源。因此,在对数据信息进行处理时,首先要进行冗余点处理,即将经纬度信息相同的多余数据点删除。
3)数据提取:遍历数据库提取满足要求的数据点。
4)漏点处理:主要是在遍历数据库时,通过插值法对缺失的数据进行插值处理。具体实现方法为:当存在两个时间间隔大于一秒的数据点时,认定这两个数据点之间存在漏点。根据两点之间的时间间隔以及经纬度、飞行高度等数据的差值,计算出插值所需的增量信息,再进行插值处理。
5)滤波处理:主要是通过跟踪滤波来计算数据点的预测值,用于后续异常点的处理,每一次数据点处理都要通过α-β滤波来计算预测值并且更新迭代系数。
6)异常点处理:主要是通过预测值与观测值之间的差值来处理。两者差值较大时,说明观测值失真需要剔除;差值较小时,将两个数据按照系数进行加权。
7)数据储存:将处理完成的新数据信息存储至数据库中。
3.2 跟踪滤波
为了尽可能得到准确的飞行航线,在对ADS-B数据进行处理时,该系统还需要进行航迹跟踪计算,即通过当前接收的ADS-B数据来对下一时刻目标的位置进行预测,其主要步骤包括平滑计算和外推计算。平滑计算是对目标的当前坐标进行估计,以得到当前时刻坐标的平滑值;外推计算是对目标的外推坐标进行估计,以得到下一时刻坐标的预测值。需要说明的是,第3.1节异常点处理采用的是预测值。
在上述平滑计算和外推计算中,通常采用α-β滤波器或Kalman滤波器[8-9]。α-β滤波器是一种可用于状态估计、数据平滑的滤波器;与Kalman滤波器相比,α-β滤波不依赖系统的具体模型,使用简单,且能使系统始终保持对目标的连续跟踪。因此,考虑到计算复杂度和跟踪性能。
本文在进行航迹跟踪计算时采用了α-β滤波器,其实现框图如图4所示。

图4 α-β滤波器框图
(1)
滤波器的初始条件为

(2)
由图4和式(1)可知,α是预测值和观测值差值的加权系数。当α=0时,平滑值等于预测值;当α=1时,平滑值等于观测值;当0<α<1时,平滑值等于预测值和观测值的加权结果。β对速度值的平滑作用类似。
4 数据显示模块
在该数据采集处理系统中,由于同一ADS-B信号携带的数据信息在数据库中存在两种不同形式,即原始ADS-B数据信息和经处理后的ADS-B数据信息。因此,本文在该系统的数据显示模块中,设计了实时数据和和数据分析两种显示模式。
4.1 实时数据显示模式
实时数据显示模式使用原始ADS-B数据,该数据是直接从ADS-B接收子模块中采集得到的,不经过数据处理模块而直接传至数据显示模块。在该模式下,可以做到对飞机飞行航线和航班信息的实时显示,但可能会存在冗余点、漏点和异常点的情形,导致最终形成的飞行航迹和航班信息部分丢失或者发生错误。
图5和图6分别为数据显示模块中飞行航线及航班信息的显示界面。从图5可以看出,数据采集处理系统共监测到5架民航飞机,按照民航飞机与数据采集点的远近,其ICAO代码分别为781A9B、780FOF、78095F、780713和780DAC,与每架飞行关联的纬度、经度、高度、距离和接收时间信息在图6中得到了展示。
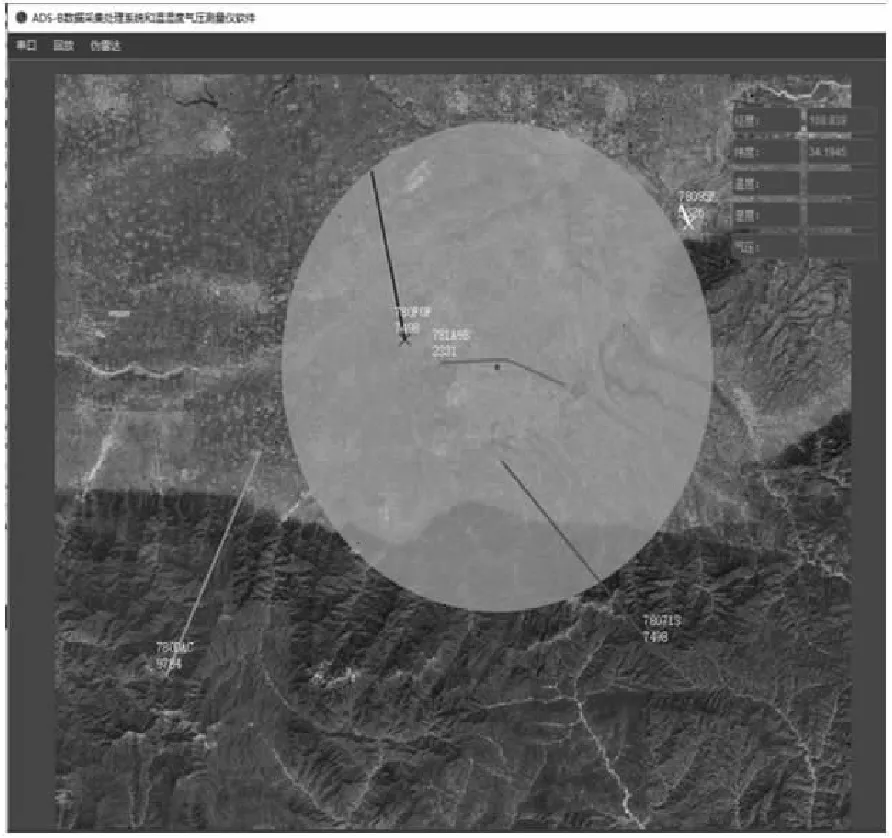
图5 飞行航线显示界面

图6 航班信息显示界面
4.2 数据分析显示模式
数据分析显示模式使用经处理后的ADS-B数据信息,该数据经过数据处理模块的处理后,再传至数据显示模块。在该模式下,由于经处理后,原数据中的冗余点、漏点和异常点现象被清除,因此可以得到优化后的飞行航线和航班信息,从而对飞机航行数据进行更精确的分析。
5 系统运行及分析
本系统在实际的民航ADS-B环境下进行了多次测试。具体测试中,我们在东经108.832384°,北纬34.0224204°处1200m高的山上进行该系统的ADS-B数据接收测试,飞行数据测试结果如图6所示。在图7中,系统接收机与飞机间距离大于400km,得到了民航飞机的4维位置信息,并且数据间隔也基本在1s以内,实现了对飞机航行信息的采集处理。在多次实地测试中,我们主要考虑接收到的ADS-B信号的实时性和准确性指标,从得到的飞机航班信息的实时数据显示结果和数据分析显示结果可以看出,此系统在实时性和准确性方面都有着优异的性能。
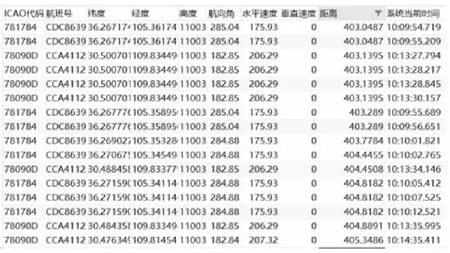
图7 1200m ADS-B接收数据
6 结束语
相对于传统的数据采集处理系统,本文提出的基于ADS-B的数据采集处理系统从ADS-B的帧结构出发,通过对ADS-B信号进行数据采集、处理和显示,不仅可以实时显示飞机的飞行航线和航班信息,还可以通过对ADS-B数据进行处理得到完整的、准确的飞机航线和航班信息。这些数据信息不仅对民航中的飞行管制有所帮助,还对我国未来新航行系统的建设有着一定的参考价值。
猜你喜欢
心理学报(2022年4期)2022-04-12 07:38:02
水泵技术(2021年3期)2021-08-14 02:09:20
青年歌声(2019年12期)2019-12-17 06:32:32
石油化工建设(2019年4期)2019-10-10 01:39:24
石油钻采工艺(2019年3期)2019-09-25 02:33:18
电子测试(2018年1期)2018-04-18 11:53:37
北京航空航天大学学报(2017年7期)2017-11-24 05:27:33
北京航空航天大学学报(2016年6期)2016-11-16 01:50:52
读写算·高年级(2016年2期)2016-05-30 04:50:02
中国惯性技术学报(2015年1期)2015-12-19 13:12:17