基于智能微缩车的车路协同实训平台设计
2022-07-20 01:40:50郑春芳
河北能源职业技术学院学报 2022年2期
房 亮,郑春芳,王 涛
(1.天津职业大学,天津 300410;2.中国汽车技术研究中心,天津 300300;3.天津职业技术师范大学汽车与交通学院,天津 300222)
汽车产业快速升级并朝着智能化、网联化方向迈进;全国各地纷纷设立网联汽车先导示范区,加快智能科技产业、优势前沿产业发展,智能网联无人驾驶车辆发展进入快车道,行业亟需大量智能网联汽车高技术技能从业人员,人才培养迫在眉睫。车路协同系统(Cooperative Vehicle Infrastructure System,CVIS) 是采用无线通讯技术,进行全方位的车与车、车与路的信息交互,采集行驶信息开展车辆主动安全控制,实训人-车-路的有效协同,保障交通安全,提高通行效率[1]。采用实车和真实环境模拟实验和教学成本较高,为解决智能网联汽车实训产品制造成本、维护成本问题,本研究将多种传感器移植到智能网联微缩车上,实现其与实车一致性功能。
1 车路协同仿真实训平台设计
1.1 智能微缩车介绍
智能微缩车融合多传感器搭载了与智能网联汽车传感器具有相同功能和原理的微型传感器,按照1:16比例与实车缩放,着重训练智能网联车辆设备装调、代码编译、参数调节、道路测试、运维检修、V2X多维通信能力,辅助建立智能网联汽车感知、决策、控制原理的知识技能体系。[2]
智能微缩车基于ROS系统开发,ROS系统在机器人软件编写方面有广泛的应用,将大量的库、工具、协议集成在一起,极大的简化了复杂多样的机器人操作平台任务的创建和行为的控制[3]。基于ROS系统的智能微缩车结合沙盘模型的场景,易于学生理解和掌握智能车辆传感器及其工作原理、使用方法等相关技术知识,培养学生对于智能汽车等人工智能技术的认识,增强学生在人工智能时代的就业竞争力,也可以帮助相关企业进行科研实验。
智能微缩车集成了激光雷达、IMU(惯性导航单元),里程计等传感器设备,对于周围环境进行探测感知并建立室内环境的地图,并在此基础上完成任一目标点导航的任务,并在自主导航过程中可以主动避开前进过程中遇到的障碍,同时进行路径规划更新。ROS平台车的主要组成部件有:思岚A1激光雷达、乐视Astra深度相机、IMU(封装在STM32控制板上)、轮式里程计(封装在12V驱动电机内),SCL-J19工控机(上位机),STM32控制板(下位机),5200mAh锂离子电池(供能设备),12V电机(驱动设备),转向舵机(转向控制)。
智能微缩车车载单元OBU通过数据传输线接收来自激光雷达和深度相机的环境信息,通过内置的算法对环境信息进行识别处理,根据处理结果进行决策控制,决策结果通过数据传输线由工控机传输至STM32控制板,通过STM32控制板转化为电信号再经信号传输线将控制指令发送给位于后轴的驱动电机和位于前轴的转向舵机,从而完成加速、减速、差速转向、倒行等一系列基础运动,通过这些基础运动的组合来完成后续一系列功能。
1.2 实训沙盘交通场景介绍
平台所设计的实训沙盘包括了智能车辆的常见使用场景:自动寻线行驶、自动泊车、雷达跟随行驶、行驶过程中自动避障、红路灯识别等。通过在相对应场景下对智能小车进行操作和实验,图1为等比例实训沙盘交通场景设计。

图1 等比例实训沙盘交通场景
所搭建的仿真沙盘模型,根据常见的交通场景如十字路口、丁字路口、匝道、立交桥等,将微缩场景合理布局到沙盘之中,尽可能保证与实际道路的还原程度。沙盘一侧可通过总控制台控制沙盘模拟场景中路灯的开启及各处红绿灯开启和关闭,测试智能微缩车道路的适应性,如图2所示。

图2 沙盘控制台
1.3 道路及路侧系统设计
微缩车、沙盘、路侧单元及云计算平台共同构成了“车-路-云”系统。道路及路侧系统模拟真实交通环境中的道路环境及辅助设施。微型道路环境应包括实际道路的各种要素,如道路交通标志、车道线、信号灯等道路基础设施,以及十字路口、急转弯、坡道、直道等行车环境。路侧系统可辅助并保证智能车辆有序高效的通行,共包括监控命令终端、无线通信网络、数据服务器和视频监控系统[3]。平台通过射频识别技术(radio frequency identification RFID)获取智能微型车当前的实际坐标位置。智能微型汽车搭载的车载单元OBU,经过无线WiFi传输,与路侧单元RSU交互信息。路侧单元RSU将采集到的信息上传到云计算平台进行实时分析计算。视频监控系统负责车辆道路协同仿真平台的整体监控。车路协同仿真实训平台整体架构如图3所示。
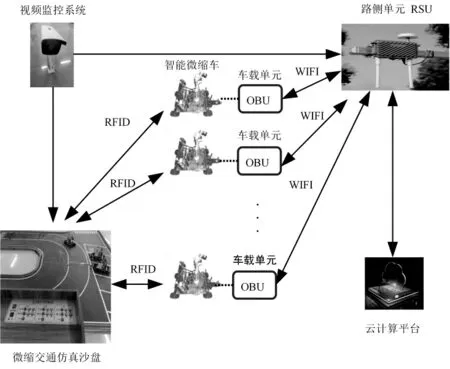
图3 车路协同仿真平台整体架构
2 .车路协同仿真实训平台实训项目开展
在交通实际应用中,无人驾驶车辆实现无人驾驶的环境感知策略目前并不唯一,无人驾驶车辆可通过毫米波雷达、视觉感知系统、超声波雷达、GPS高精定位传感器、惯性导航传感器IMU、激光雷达等不同传感器的组合来完成车辆环境感知操作,且要掌握每种传感器有自身特性及适用场景。[4]
2.1 SLAM建图
SLAM全称Simultaneous Localization and Mapping,即同时定位与制图。问题可以描述为:如果智能车在一个未知的环境中被放置在一个未知的位置,可否使智能车在移动的同时逐渐画出一幅完整的环境地图。此完整地图是指在没有障碍的情况下移动到房间的每个角落。这就意味着一辆车来到陌生的环境,它需要知道自己所处位置坐标,如果在移动,就需要时刻的坐标更新。制图是指对周围环境的了解,对周围环境的了解就能更好地定位自己,从而进一步实现在地图中任意两点之间的移动。
微缩车通过激光雷达,训练使用Gmapping、Cartographer、Hector-SLAM、Karto四种SLAM建图算法进行室内地图构建,掌握其基本原理,对比其建图精度、效率,激光雷达扫描SLAM建图过程如图4所示。在已经建立好地图的基础上,设定任意目标点,智能小车通过AMCL算法实现定位,计算出最优路径,通过激光雷达传感器实现对周围障碍物的感知,规避障碍物,抵达目标位置。
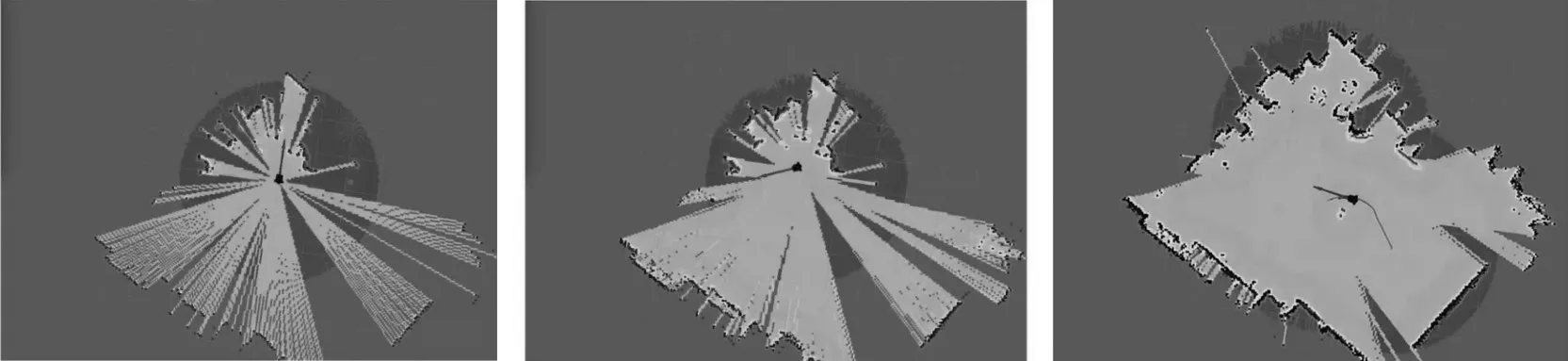
图4 激光雷达扫描SLAM建图过程
2.2 雷达跟随
通过激光雷达感知周围移动的物体,按照程序设定的固定距离和固定速度,由超声波雷达采集两车之间的距离,实现跟随行驶,如图5所示。[5]
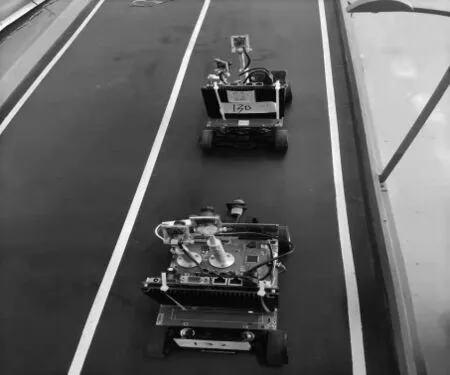
图5 雷达跟随
2.3 巡线行驶
通过搭载的深度摄像头感知地面车道线,将识别到的图像信息传回给上位机,上位机通过算法处理后将控制信息传给下位机,下位机控制驱动电机及转向舵机跟随指定路线行驶,如图6所示。[6]

图6 巡线行驶
2.4 停避障实训
如图8场景所示,自动驾驶智能微缩车在行驶过程中通过搭载的环境感知传感器首先判断道路的类型,区分出直道、弯道、坡道,随后判断与前方障碍物的距离(车辆、行人等),根据行车速度、自车转弯半径,运行车辆内置算法,执行停障或避障操作。控制过程如图7所示。
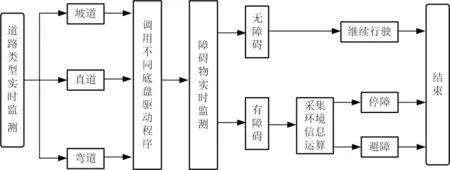
图7 微缩智能车停避障控制流程
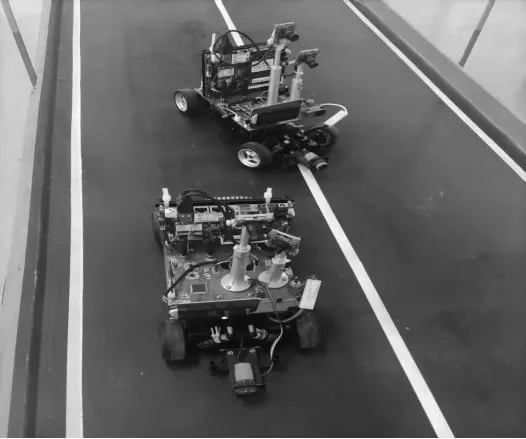
图8 停避障实训
2.5 车路协同实训
在充分了解车辆感知、决策、控制原理的基础上,智能微缩车支持车辆硬件升级、软件二次开发、软件算法优化等后续开发选项,进一步深化智能网联车辆传感器学习能力和车辆控制算法拓展。车路协同控制系统对具有共同行使目的的所有车辆进行统一管理,简化复杂的交通控制,可有效的缓解交通拥堵,提高道路通行效率[7]。智能微缩车多车编队自动驾驶如图9所示。

图9 多车编队自动驾驶
3 .结论
基于智能微缩车的车路协同实训平台通过等比例的缩放智能网联车辆和交通运行场景,模拟车辆在不同场景下的无人驾驶过程,优化车辆的算法与控制过程,对未来城市智能交通系统构建极具价值,提供了智能网联车辆人工智能、车辆工程、测控技术与仪器、软件工程、机器视觉、信号与信息处理等多学科交叉的实验实训平台。同时,本智能微缩车的车路协同仿真实训平台设计,是贯彻“岗课赛证”育人模式的进一步举措,助力汽车产业升级背景下的智能网联汽车高技能人才培养,推动了产业链、人才链、创新链的有机融合。
猜你喜欢
幼儿园(2021年3期)2021-07-28 07:11:24
海峡科技与产业(2021年1期)2021-05-22 01:26:54
福建基础教育研究(2020年1期)2020-05-28 08:39:54
奇闻怪事(2019年11期)2019-12-25 07:04:54
汽车观察(2019年2期)2019-03-15 05:59:54
看天下(2018年28期)2018-10-20 01:49:12
中国交通信息化(2018年12期)2018-03-21 05:52:32
光学精密工程(2016年1期)2016-11-07 09:01:54
工业设计(2016年3期)2016-04-22 12:20:26
当代经济(2015年4期)2015-04-16 05:57:05