基于激光雷达的东莞常绿阔叶林结构参数提取与生物量估算
2022-07-09 16:07苏纯兰朱韦光严朝东董辉刘颂颂曾焕忱
热带林业 2022年1期
苏纯兰,朱韦光,严朝东,董辉,刘颂颂,曾焕忱
1.东莞市林业科学研究所,广东东莞 523006;
2.中国科学院华南植物园,广东广州 510650
森林是自然界中物质最繁多、多样性最丰富多彩、层次结构最复杂、生产力最宏大的陆地生态系统,在各类陆地生态系统中居于主体地位[1],具有调节气候、涵养水源、碳固存、生物多样性保育等不可替代的生态系统功能和服务功能[2]。森林资源是生态建设的物质基础,是生态安全的前提保障,是生态文明的重要载体,而森林资源调查是掌握森林资源数量、质量以及分布状况的重要途径,也是森林经营规划方案科学制定和生态结构调整的重要依据。获取森林结构参数,如树高、胸径等,是森林资源调查的主要工作,为森林生物量、碳储量以及经济生态价值估算提供重要的基础数据[3]。
森林群落结构是指树木个体在环境中的分布及其与周围环境之间相互作用所形成的组分和构造,包括非空间结构特征指标如物种组成、区系特征、径级结构等和空间结构指标如林木空间分布格局、竞争指数(生长空间、大小比数)以及混交度等[4]。与其他生态系统相比,森林生态系统在水平和垂直维度上都存在着较大的异质性。森林生态系统结构不同,其所具有的生态功能也就不同[5]。因此,研究森林结构,对深入了解物种分布与环境的关系,以及探讨森林生长发育和更新演替规律等都具有重要意义[6]。传统森林结构调查,多采用人工调查的方式,既费时又耗力,且调查结果多以文字解析或统计描述为主,无法有效的解决森林生态系统空间异质性问题。森林生物量是评估生态系统功能的基本测度指标,一直受到学者们的高度关注。有学者[7-8]通过估算生物量进而评估植被碳储量、生产力及其他生态系统服务功能。激光雷达可以直接、快速、精准地获取研究对象的三维空间信息[9-10],在森林监测中使用激光雷达可以精确获取森林三维结构和功能信息[11],如树高、胸径、冠幅直径、冠幅面积、冠幅体积等[12]。通过提取得到的结构参数便可以进一步估算生物量、蓄积量等[13-14]其它重要森林信息。
文章将机载激光雷达和背包激光雷达的扫描数据,通过点云处理软件以人机交互的方式获取阔叶林单木及结构参数,包括胸径、树高、冠幅直径、冠幅面积、冠幅体积等因子,并与实测数据进行对比验证,分析各结构因子的提取精度,并用监测结果对林分生物量建立预测模型,研究采用背包激光雷达数据和机载雷达数据获取林分结构参数及估测生物量的精度及适用性。
1 研究区及设备概况
1.1 研究区概况
大岭山森林公园位于广东省东莞市西南部,珠江口的东北部,北至厚大路,东以大岭山山体为界线,东南以莲花山山腰为界,西南至大岭山林场场部,西北至厚街大迳村。东莞市林科园位于大岭山森林公园东南部,面积105.33hm2,是该市以林业科研和科普教育为主题的基地。研究区是位于东莞市林科园的地带性森林群落恢复与重建研究示范区,是乔木层以马占相思为主的常绿阔叶林。
1.2 设备概况
该研究选用大载重工业级无人机(RT470)(图1)四旋翼无人机及背包搭载激光雷达对常绿阔叶林进行监测,空中雷达(挂载LD-R1350 激光雷达)可直接安装于机舱腹部,飞机整体采用航空铝材、碳纤相结合的机架结构,雷达卡扣式安装简便快捷,单架次续航可达40min,抗风等级6 级。同时有效提升飞机的安全性、有效性,充分保障对于测量的安全和续航时长的要求。背包雷达(PX-80)直接安装于背包(图1),对林地结构参数进行监测。
2 研究方法
2.1 地面样地建设
于监测区域选择4 种不同抚育强度的以马占相思为主的阔叶混交林,各建立1 个20m×60m 的样方,调查对象为样方乔木、灌木、草本层。乔木层监测指标包括树木种类、树高、胸径、冠幅、位置;灌木层监测指标包括灌木种类、高度、盖度;草本层监测指标包括种名、盖度等指标。
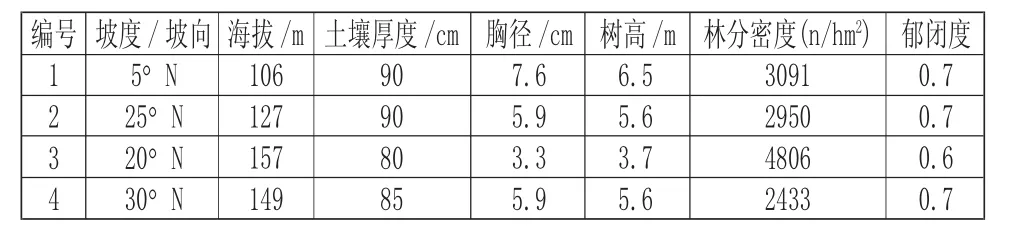
表1 各样地基本情况Tab.1 Basic Information of Various Places
2.2 无人机数据获取
无人机激光雷达影像数据的获取时间为2019年3 月,飞行时天气状况良好。通过定位设备,找到布设样地位置,进行无人机遥感影像采集。每个样地采集的影像大小依据当地的地面控制而定,飞行区域为样地范围的10hm2森林。
背包雷达影像的获取时间为2020 年3 月,区域同上。
2.3 无人机数据处理
因无人机为低空飞行,获取的单张遥感影像覆盖范围较小,需要通过拍摄多张影像才能覆盖样地及地面控制点范围,而且无人机的飞行姿态、地面地物的复杂性、不同时间光线明暗等,都会影响拍摄得到的单张影像质量[3]。机载激光雷达图像拼接的流程一般为:图像几何校正、图像预处理、图像配准、图像融合,从而得到拼接后的监测区域全景影像。无人机激光雷达及背包雷达全景影像数据拼接及分析运用LiDAR360 软件。通过软件拼接后就可得到可直接用于分析的机载激光雷达点云数据、背包雷达点云数据,导出监测指标,具体导出初级指标如表2。
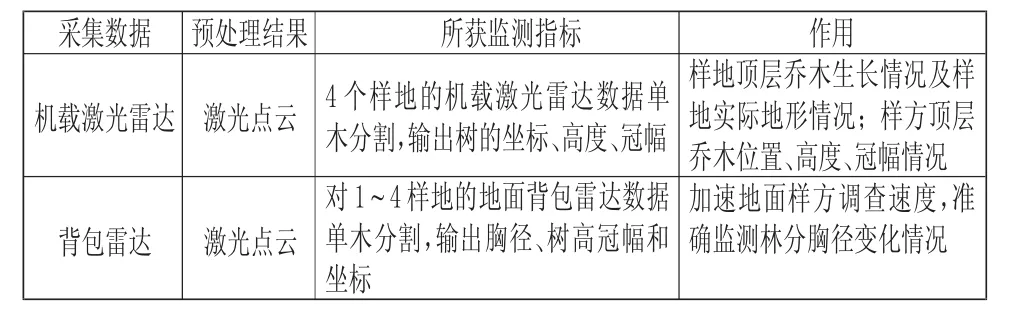
表2 各类监测平台导出初级指标Tab.2 List of Primary Indicators Exported by Various Monitoring Platforms
3 结果与分析
3.1 无人机激光雷达监测指标提取
对机载点云数据进行点云着色,通过分析可知,数据采集范围合格。点云数据的航带间的点云没有分层,能够很好采集植被下的地面点,还原实际地形起伏,地面点厚度在22cm 以内(地面有大量落叶,可能导致地面点厚度增加)。点云数据能够真实还原树木点云,查看树木分布及生长情况,树木扫描情况数据质量合格(图2)。
通过软件提取单木种子点,进行单木分割,能够获取树高、冠幅等信息;单木分割可以得到树木比较精确的位置,快速获取林班树高、冠幅等信息,且通过分析点云数据可为后续生物量估算提供数据支撑。4 个20m×60m 的实测样地,无人机激光雷达点云各样地顶层树木分割数量为1 号(25 棵)、2 号(12棵)、3 号(19 棵)、4 号(27 棵)。这些被识别的顶层乔木大都为马占相思,平均识别率为74%。
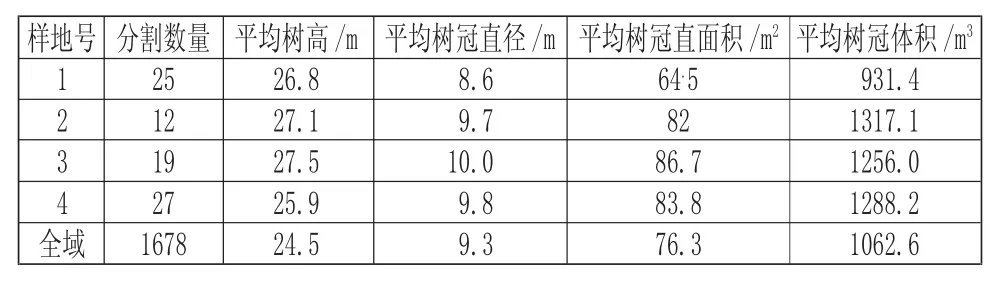
表3 1~4 号样地机载激光雷达点云单木分割结果Tab.3 Single Tree Segmentation Results of Airborne Lidar Point Cloud for Plot No.1~4
3.2 背包激光雷达监测指标提取
使用PX80 背包lidar 采集了1~4 号样地的地面点云数据,用于精细化获取单木位置及胸径,采集步骤如下:实地踏勘,规划采集路线,布设像控板。地面背包雷达扫描的整体情况:能够清晰分辨树木主体结构,有少量躁点;树木高度大于8m 的部分,背包雷达采集不到。点云回环情况:样地内点云没有分层、重影。地面点云密度情况:5000pts/m2~60000pts/m2之间。综上,背包雷达采集数据较好,可用于后续的处理与利用。将PX80 背包数据导入LiDAR360 分析软件中进行单木分割处理,提取单木位置、胸径等参数,单木分割的流程为:裁剪样地点云;地面点分类;点云归一化原数据;提取种子点、人工编辑;基于种子点的单木分割;获取单木位置、胸径等参数,并对背包雷达单木分割结果进行精度分析。
采集的背包数据,经过轨迹解算、点云着色、三维重建处理,可导出标准格式(.las)的点云数据。将点云数据导入分析软件中进行单木分割处理,为区分不同分割单木,对不同单木赋予不同颜色,生成分割结果,背包激光雷达对于地面点向上一定距离内点云采集密度较大,呈现结果较好,但超过这一距离时,点云逐渐变得稀疏,显示结果相对较差,经过软件分析,这一距离为8m,即背包雷达能够准确获取距离地面8m 之内树木的点云数据。大于这个值,点云数据就只能呈现结构位置情况,无法显示细节参数,或细节参数显示不准确。精度分析显示,背包雷达测量胸径(>5cm) 与实际测量对比标准误差为1.2cm(表4)。背包雷达测量胸径与实测胸径拟合直线图(图4),直线K 值为1.038,R2高达0.9391。背包激光雷达可在林下灌木和小乔木较少时,快速准确监测样方树种胸径,为生物量估算提供精确数据基础。
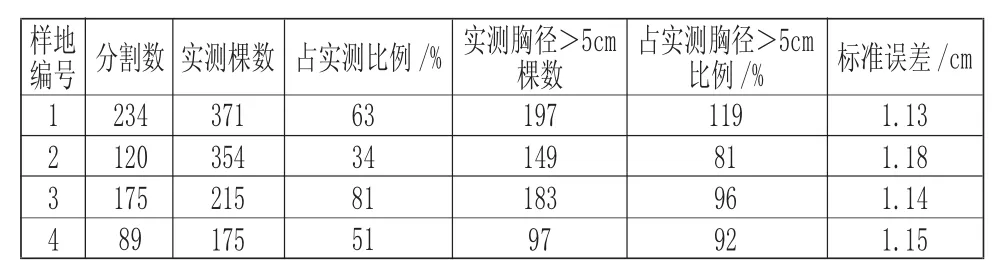
表4 背包雷达数据精度分析Tab.4 Accuracy Analysis of Backpack Radar Data
3.3 生物量估算结果分析
生物量与森林垂直结构信息相关性高[15],当选择机载激光雷达时,选取乔木树高作为初级反演指标,用上述1~4 号样地分割的树高作为自变量与通过实测获得胸径作为因变量进行各类曲线回归(表5),结果发现10 个曲线模型的F 检验P 值都远小于0.01,拟合模型在统计学意义上非常显著。由表5 可知,点云数据所获树高与实测胸径拟合度(R2)最大的是二次曲线方程,故相对而言二次曲线方程为描述云数据所获树高与实测胸径关系的最优方程。
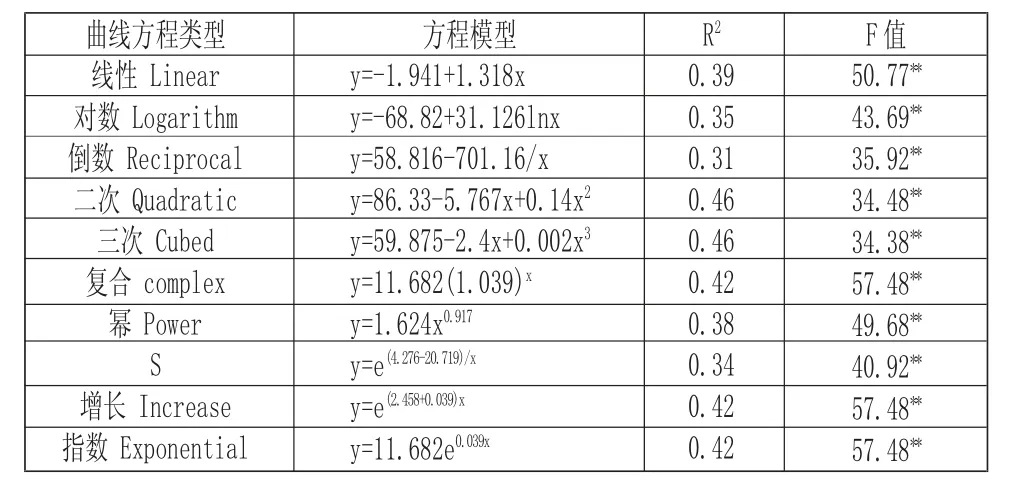
表5 机载激光雷达点云监测树高与实测胸径曲线拟合模型Tab.5 Airborne Lidar Point Cloud Monitoring Tree Height and Measured Breast Diameter Curve Fitting Model
通过把10hm2(除1~4 号样地)所获得的剩余点云估测树高带入最优拟合曲线:y=86.33-5.767x+0.14x2,即可得到相应的胸径值。胸径值带入阔叶林乔木各器官生物量W=aDb 模型方程[16]计算得到的生物量(表6)。由表6 可知,无人机激光雷达点云数据反演的大岭山森林公园以马占相思为建群种的阔叶混交林,顶层单株干生物量平均值为0.42t,枝生物量平均值为0.1t,叶生物量平均值为0.07t,根生物量平均值为0.12t,单株总生物量平均值为0.71t。

表6 无人机激光雷达数据阔叶混交林生物量反演结果Tab.6 Biomass Inversion Results of Broad-Leaved Mixed Forest From Uav Lidar Data
当选取背包激光雷达数据反演时,由已获得的背包雷达数据处理得到的1~4 号样地的单木分割结果,代入生物量W=aDb模型方程。结果显示(表7),背包雷达扫描点云数据反演单株干生物量平均值为0.09t,枝生物量平均值为0.02t,叶生物量平均值为0.03t,根生物量平均值为0.03t,单株总生物量平均值为0.16t。

表7 背包激光雷达数据阔叶混交林生物量反演结果Tab.7 Inversion Results of Biomass in Broad-Leaved Mixed Forest From Backpack Lidar Data
4 结论与讨论
4.1 结论
该研究以东莞市林科园的常绿阔叶林为主要研究对象,通过无人机激光雷达和背包激光雷达获取森林样地数据,提取相关单木参数并估算其生物量。得到的研究结论如下:无人机搭载激光雷达可以快速获取林地的三维地形情况[15],通过单木分割可获得林冠上层乔木的树高、冠幅等单木参数,进而估算生物量。背包激光雷达可准确监测林冠下层林分结构信息,其中胸径监测精度高,利用生物量方程进而也可以估算生物量,并且可作为机载雷达的补充。无人机遥感监测技术与地面人工样方监测技术相比,其可在较短时间,较高效率,监测得到评估指标,估算生物量。随着人工成本在不断提高,无人机遥感监测优势将越来越明显。
4.2 讨论
单木参数获取是森林资源调查的主要工作,为森林生物量估算提供重要的基础数据[17]。及时准确、快速高效以及低成本的获取单木参数和森林地上生物量一直是林业从业者及研究人员关注的重点问题。传统的森林资源调查多采用抽样调查的方法,需调查人员对样地内所有树木每木检尺,需耗费大量的时间、人力、物力和财力,且调查周期长、效率低[18]。激光雷达具有很强的穿透力,能够获取森林三维空间结构及林下地形的详细信息,进而准确的提取单木参数,并为无损测量估算森林相关参数提供了借鉴和参考[19-21]。
激光雷达是近些年来发展十分迅速的一种主动遥感技术,对植被和林冠层均有很强的穿透力,能够获取森林空间结构的详细信息。单木参数因子是森林资源调查的主要工作,及时准确、快速高效的获取这些森林基本参数因子可以大大减少林业从业者的工作量、调查周期以及提高调查效率[15]。激光雷达不仅可以从森林资源数据中提取基本的森林参数因子,还能记录森林真实的三维空间结构信息,为森林资源的动态监测提供了准确有效的解决方案。无人机激光雷达和背包激光雷达均能够在短时间内获取森林空间结构详细的点云数据,进而提取林木参数因子,结合生物量异速生长模型估算森林资源的地上生物量;而后直接与某一生物量相关性较高的生态效益搭建关系,或生物量与生态效益搭建关系,建立模型,从而进行生态效益估算[22-24]。
在该次监测研究中,无人机搭载的激光雷达可获取的平均树高为24.5m,平均冠幅直径为9.3m,平均冠幅面积为76.3m2,平均冠幅体积为1062.6m3。因此,无人机搭载的激光雷达更适合一些林冠分层少,林下灌木少的林地监测。地面背包激光雷达则适用于样地级小尺度,可以获得样地内单木位置、胸径,测量胸径(>5cm) 与实际测量对比标准误差为1.2cm,幼树、相邻单木枝叶分割时可能出错。监测中也可发现,背包激光雷达在抚育强度较高的样地,即林下植物少的样地,其监测效果较好,这说明背包雷达测量受植物覆盖度及郁闭度影响较大。另外,背包激光雷达也可精确监测树高小于8m 的树木的冠幅。
猜你喜欢
绿色天府(2022年9期)2022-11-19
安徽农业科学(2022年19期)2022-10-29
湖南林业科技(2022年4期)2022-08-29
世界热带农业信息(2022年8期)2022-07-19
绿色科技(2022年11期)2022-07-02
贵州畜牧兽医(2022年3期)2022-06-28
绿色天府(2022年2期)2022-03-16
现代园艺(2021年23期)2021-12-01
防护林科技(2021年3期)2021-09-12
南方农业·下旬(2014年2期)2014-09-23