
一种多功能输液架的设计
2022-07-09 08:50:52陆鑫焱王曼丽
科学技术创新 2022年19期
陆鑫焱 王曼丽*
(1、辽宁科技大学,辽宁 鞍山 114051 2、鞍山钢铁集团有限公司,辽宁 鞍山 114021)
1 研究背景
在医疗领域输液架应用非常广泛,是用于吊挂药液容器的必备医护设备。使用时患者坐卧在输液架旁边,药液袋吊挂在输液架上并通过输液管和针头,应用大气压强原理将药业注射入患者的静脉内,实现治疗的目的。目前主要有天轨式、儿童座椅式、立式等,虽然这些种输液架已经能够满足日常的基本需要,但是随着人民生活水平的提高和社会科学技术水平的不断进步,仅仅具有基本功能的一个架子,已经不能满足患者高质量就医环境的需要,本设计在规划之初便进行了充分的调研,总结出人们对于输液架的改进需求主要集中在三个方面,一是由于输液情况监控不及时造成的事故;二是由于输液时不能随意走动而造成的不便;三是由于输液的温度与体温有较大的温度差而造成身体的不适应。为解决上述问题,本文应用电子信息和自动化技术设计了一种多功能输液架,能够实现患者输液时监控输液情况、跟随患者行走和控制输液温度等功能,增加这些功能的输液架能够从医院最常规的输液环节提高医疗服务质量,对于改善患者的就医体验,减缓医患矛盾有很大的帮助[1-2]。
2 总体方案设计
本输液架的总体设计方案包括液量监督与控制、UWB 自动跟随、药液温度控制三部分功能。输液架主体是传统的医疗输液架,在原有承载输液药品功能的基础上作为其他各新增功能模块的载体;小管液位检测传感器用于监测输液状态,并通过内部继电器控制输液量控制模块实现对输液量的控制;自动伴随控制模块与UWB标签手环相互传输信息计算相对位置,确定人和输液架的位置变化数据,传输给中央控制器控制主动轮行走的方向和距离,实现伴随功能;采用一个主动轮三个从动轮的设计即可以保持输液架的平稳行走,又节省了整体设备的成本;加热部件安装在手环上实现在输液过程中对输入人体的药液进行加热;从而实现在原有输液架基础上增加自动伴随功能、输液液量控制和药液加热功能的设计目的。整体结构示意图如图1 所示。

图1 整体结构示意图
3 设备功能的实现
3.1 液量监督与控制
患者在输液时因为担心输液过程出现问题,需要不时的关注药液的余量,这在很大程度上增加了患者和陪护人员的心理负担。如果对输液过程监控不及时就有可能发生输液过快、过慢、肿胀、回血等医疗问题。坚持采用自动化的手段对输液过程进行监控是非常有必要的,即可以大大缓解患者输液时的心理负担,也可以应用科技手段减少输液过程缺乏监控而造成的医疗事故,从而减轻医患矛盾,减轻医护人员的工作压力。在本设计中,输液情况控制部分包括中央控制器、液位检测开关、电动伺服夹爪以及蜂鸣器等部件。液位检测开关连接电动伺服夹爪和蜂鸣器并固定在输液支架上部。液量监控制过程如图2 所示。
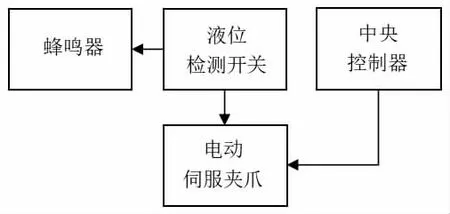
图2 液量监控制过程
液位检测开关采用小管道式5-10MM 非接触液位传感器,型号为XKC-Y28A-5V,信号选为常闭输出,该传感器隔着输液管感应液体液面,不与药液直接接触不会影响药液的品质,应用内部自带的2A 继电器可直接驱动负载,当感应到输液管内的液体时指示灯亮继电器不动作,当输液管内没有液体时指示灯灭继电器动作。在本设计中,小管液位检测开关时刻监测输液液体流通情况,如果出现液体断流,则继电器动作控制电动伺服夹爪夹紧输液管停止继续输液,同时控制蜂鸣器发出蜂鸣声对患者和医生进行提醒。
电动伺服夹爪的选择很重要,通过该部件控制输液的速度。本设计选用RM-GB 智能电动伺服夹爪,该电动夹爪内部带有伺服电机易于操作,能够完成高速度情况下的夹紧工作。在使用过程中,将电动伺服夹爪通过脉冲控制器连接到中央控制器上,患者和医护人员可以通过调节按钮精准的控制输液的速度,当输液将要完成时通过小管液位检测开关的控制及时的夹紧输液管停止输液并控制蜂鸣声通知医护和患者。
3.2 基于UWB 的自动跟随
患者输液时间一般达到两个小时以上甚至更长,在这期间会因为输液的影响而产生去卫生间的需求,儿童患者更是因为好动的年纪很难长时间保持坐在座位上不走动,面对这种情况目前一般由陪护着帮助拿着输液袋,并保持一定的高度陪同行走,患者和陪护人员都很不方便,尤其是出入卫生间时更是比较尴尬,因此在考虑输液架整体制造成本的前提下,用简单、经济和实用的方法实现自动跟随功能是非常必要的。
3.2.1 定位系统的选择
自动跟随技术依托于定位系统,随着无线通讯技术的发展,定位逐渐趋于完善并应用到各行各业中。通过对四大全球定位系统[3-4],以及蓝牙定位、Wi-Fi 定位、UWB 超宽带无线通信定位[5-6]等技术的分析,我们发现其中定位精度较高的UWB 超宽带无线通信技术的特点符合本设计的需要,因此选择该技术实现自动跟随功能。
3.2.2 自动跟随功能模块的组成结构
自动跟随功能模块的组成包括中央控制器、USB 定位模块、方向控制、运动控制等部分,本设计中选用3 个UWB 定位部件,其中1 个设置为标签用于佩戴在患者身上,另外两个设置为基站安装在输液架的基座上,用于获得患者与输液架之间的相对位置信息;应用方向控制电机实现运动方向控制,应用运动控制电机实现输液架行走功能,从而实现设计目标的自动跟随功能。自动跟随模块组成结构如图3 所示。

图3 自动跟随模块组成结构
3.2.3 自动跟随模块的功能实现
中央控制器采用Arduino mega2560 开发板,板载ATmega2560 微处理器,具有54 个输入输出接口,具有4对硬件串口以及模拟软串口功能,能够满足本设计中液量监督与控制、自动跟随、药液温度控制三个功能模块公用同一中央控制器的需求。另外该开发板还具有价格低廉、使用方便等的特点。
UWB 定位模块是实现自动跟随功能的主要部件,通过串口(UART)与中央控制器通信。本设计中采用基于DW1000 芯片开发的NodeMCU-BU01 UWB 室内定位开发板,具有双向测距功能,定位精度为10 厘米,数据传输速度达到6.8Mbps,符合输液架实现自动跟随需要的反馈速度和定位精度的要求。定位模块包括UWB 标签和UWB 基站两个部分。UWB 标签手环佩戴在患者的身上,与X 轴、Y 轴方向的UWB 基站模块无线通信,检测X 轴方向和Y 轴方向UWB 基站模块与UWB 标签定位手环之间的位置变化数据,通过UART 串口协议传输给中央控制器;中央控制器计算得到UWB 标签手环与UWB 基站模块之间的距离和角度变化,进行后续动作的应用。UWB 自动跟随计算如图4 所示。

图4 UWB 自动跟随计算
图中已知标签c 到基站a 和基站b 的距离分别为Dca 和Dcb ,基站a 和基站b 到中心点o 的距离分别为Doa 和Dob 。通过计算得到标签c 到输液架中心点o 的距离Dco 用于控制输液架和标签之间的距离,计算得到夹角∠coe 用于控制输液架运动的方向。
方向控制电机采用20KG DS3218 舵机,连接到中央控制器的PWM 引脚,接收运动方向信息并带动主动轮转向。舵机是位置伺服的驱动器,可以通过程序控制转角大小并保持状态,在Arduino 开发板中通过调用servo函数库可以很方便的操控舵机实现设计目标。运动控制电机采用齿轮箱与马达一体的42 行星减速步进电机,减速比为17:1,扭矩可以达到0.7N,具有响应快调节方便等特点。步进电机通过步进电机驱动器连接到中央控制器的PWM 引脚,中央控制器通过程序控制发送脉冲的数量,从而控制步进电机的角位移量,通过控制脉冲发送的频率,控制步进电机输出轴转动的速度,实现前进、后退、快速、慢速等动作,实现自动跟随的设计目标。自动跟随模块各部分的通信关系如图5 所示,步进电机驱动控制如图6 所示。
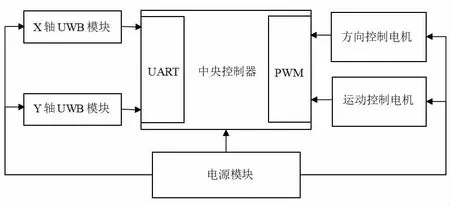
图5 自动跟随模块通信关系
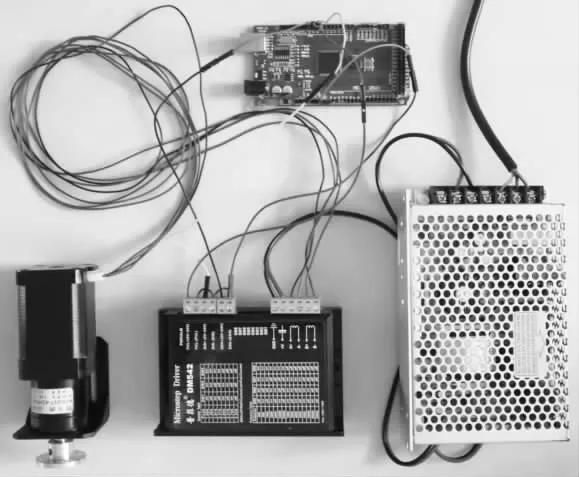
图6 步进电机驱动控制
3.3 药液温度控制
输液过程中,药液通过输液管和针头流入到人体静脉血管中,由于药液的保存环境和室内温度等因素影响,药液的温度与人体温度往往存在较大的温度差,容易引起病人的不适和各种输液反应[7],特别是天气冷的时候更易导致感觉冷、胃肠不舒服、咳嗽等症状。病人和家属为了解决药液温度低的问题,经常采用体温加热,或用热水袋为输液管适度加温等方式,这些做法不但增加了陪护难度,而且效果也不好。
本设计中加热片选用聚酰亚胺加热膜柔性电加热片,该加热片厚度仅0.25mm,常用于医疗仪器,适用于任意电压,可以制作成U 型槽将输液管放入其中进行加热。温控开关选用KSD-01F25℃常闭和KSD-01F30℃常开两种规格,这种温控开关突跳式工作,控制范围为0度~150 度,工作环境温度-55℃- 160℃,短时最高温度:260℃/10 秒,性能和反应速度符合本设计的需要。KSD-01F25℃常闭开关连接电加热片,将输液管中的药液温度加热到25℃,当液体温度超过25℃时停止加热;KSD-01F30℃常开开关连接蜂鸣报警器,当药液温度高于30℃时提醒患者和医务人员及时查看情况。
4 结论
随着电子信息与自动化技术的不断发展,应用新技术和部件解决我们生活中遇到的问题,可以改善生活体验和质量。本文设计的多功能输液架在原有输液架在基础上,根据患者的需求增加了新的功能,解决了患者在输液过程中经常遇到的一些问题。设计中选用Arduino为主控板,采用小管液位检测开关、UWB 自动跟随、温控开关和加热片等电子技术,解决了病人在输液过程中遇到的输液情况监控、不能轻易走动、输液温度不适等问题,使人们能够获得更好的就医体验,具有大规模推广的价值。
猜你喜欢
中学生数理化·八年级物理人教版(2022年4期)2022-04-26 14:11:12
临床护理杂志(2021年6期)2022-01-05 03:37:54
农技服务(2020年7期)2020-12-17 20:45:50
妇女生活(2018年12期)2018-12-14 06:43:30
测控技术(2018年9期)2018-11-25 07:45:00
石油化工自动化(2018年5期)2018-11-14 02:34:30
畜牧兽医科技信息(2016年12期)2016-02-23 11:44:49
发明与创新·中学生(2015年11期)2015-11-30 00:56:55
汽车维护与修理(2015年2期)2015-02-28 12:15:41
江西理工大学学报(2013年1期)2013-03-20 14:57:11
