基于信息技术的阀门智能控制系统的设计与研究
2022-07-09 06:44:32钟家富潘益茅宋吉利
计算机测量与控制 2022年6期
洪 卫,钟家富,潘益茅,宋吉利,卫 鹏
(浙江中德自控科技股份有限公司,浙江 湖州 313100)
0 引言
工业的发展不断智能化,阀门控制系统不再局限于机械式手动阀门,传统的机械式手动阀门控制工作效率低,安全性能差,并且不能进行远程操作,因此阀门智能控制系统逐渐取代机械式阀门控制系统。现有的阀门智能控制方式通过阀门开度控制策略、智能化以及总线化研究,在阀门智能控制中存在着转速较慢、精确度不高等问题。
针对上述机械式阀门控制系统的缺陷,相关文献对阀门智能控制系统也有相应的研究,文献[1]提出了一种基于PLC PsoC的电动阀门智能控制系统,该系统可实现手动与自动切换,还具有故障判断的能力,采用系统联调,解决了调试中出现的问题,并且还具有较强的抗干扰性,但该系统不能进行远程操作;文献[2]研究了一种基于磁阻电机的阀门智能控制系统,该系统采用AVR单片机设计了硬件电路,并利用上位机通讯功能和远程控制功能,实现了控制系统的数字化和智能化,但该系统上位机软件设计不够完善,缺乏对控制器和电机工作状态的监督功能。
基于上述文献中的问题,该研究提出了信息技术下阀门智能控制的研究,设计了基于信息技术的阀门智能控制系统,硬件包括CAN通信接口、单元控制器和阀门智能控制器节点3大部分,实现了智能阀门的数字控制和智能控制;软件设计了阀门智能远程控制系统,实现了远程与现场自动切换与远程控制的功能,最后利用自适应控制算法,实现阀门参数的自整定,在此基础上依据系统的响应,进而实现阀门参数的自校正[3]。
1 基于信息技术的阀门智能控制系统的设计
信息技术应用于各行各业,在阀门智能控制系统中也占了重要的部分,因此该研究设计了基于信息技术的阀门智能控制系统,该系统以控制器为核心,将阀门的检测、控制、执行、调节等组装在一起的一体化结构[4],系统通过反馈机制,通过对比控制信号和反馈信号,进而控制输出轴、阀门智能控制,基于信息技术的阀门智能控制系统的工作原理如图1所示。

图1 基于信息技术的阀门智能控制系统的工作原理
该研究设计的阀门智能控制系统是将控制机体与执行机体组合在一体的,通过控制系统直接启动远程控制信号和直接控制电机,既可以实现远程信号控制的自动操作,同时又可实现现场的控制操作,操作完成后将操作结果上传至上位机,对操作结果进行判断,并发送出反馈信号,使阀门的智能控制进行优化[5]。
1.1 硬件设计
阀门智能控制系统的硬件设计包括CAN通信接口、单元控制器和阀门智能控制器节点3大部分。采用微控制器技术,实现了阀门的数字控制和智能控制;利用CAN总线技术,构建两级总线阀门智能控制系统,实现阀门的集中控制和远程控制[6],阀门智能控制系统的硬件设计结构如图2所示。
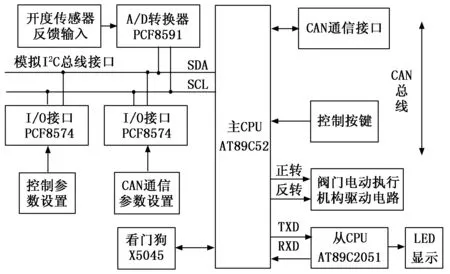
图2 阀门智能控制系统硬件结构图
本系统采用的是CAN控制器和CAN收发器结合的通信接口,实现单元控制器和智能控制器节点之间的通信。该控制器使用的是SJA1000型号;CAN收发器使用的是PCA82C250型号,能够快速接受和发送信号;微处理器采用的是AT89C52单片机[7]。该模块中利用了光电隔离电路,有效地避免了总线的干扰引入系统。
单元控制器模块利用两个CPU架构,一级CPU含有两个CAN接口,与通信系统相连接,分别与一级总线、二级总线相连接,两个总线上的传播速率能够不一样,在实际应用中根据总线中节点的分布距离进而选取合适的传送速率,进行CPU显示驱动和人机接口。
在阀门智能控制器节点的模块中,通过使用单片机来控制单项异步电动机的正反转,实现阀门的智能开关响应,在阀门处接入一个开度反馈,实现对阀门的开度准确控制,单片机也是经过CAN通信接口与总线进行通信。双CPU结构也应用在智能控制节点上,主CPU可以实现阀门的控制和CAN通信的功能。采用看门狗X5045有效地避免了系统的卡顿现象,同时看门狗X5045可以将阀门的重要数据和运行信息保存起来,在系统需要这些信息时,由看门狗X5045传出。该模块还采用了模拟I2C总线接口,实现了系统硬件资源的扩展[8]。
此外,还对系统抗干扰进行了设计,采用了光电隔离的抗干扰措施,利用光电耦合器进行对系统消除脉冲和各种噪声的干扰,使远程把测控系统与现场只有信号的通信,从而提高输入输出通道上的信噪比。利用光电耦合器,使输入与输出之间的分布电容极小,并且绝缘电阻很大,因此在信号传输中一端的干扰不易传输至另一端,因此光电耦合器既能够传输有效的信号,又能够抑制干扰信号。
在系统硬件设计中,考虑到阀门智能控制在较大压力下信号处理与传输的能力,在硬件系统中设计有大压力信号处理与传输系统,采用压力传感器,在不同压力下进行输出不同的信号,该系统分为两组信号,在大压力环境下进行输出1~5 V信号,通过对模拟量信号处理后,采用AI通道与信号采集模块相连接,并将采集到的信号进行转换,通过LCD显示屏进行显示,发生故障时,会有故障报警功能;另一路信号则是在正常环境下输出4~20 mA信号,通过模拟量光端机将信号转换为光信号,再由接收器将信号转换为电流信号为装置提供电流使用。
在信号处理与传输中采用的压力传感器为GDP 10型矿用压力变速器,可承受0~6 MPa的压力,该传感器结构一体化,易于安装,并且在易燃易爆的环境中可使用。由于在压力环境下,避免信号的干扰采用了压力信号隔离器,该压力信号隔离器采用的是WS15242D型号,来实现压力信号的隔离、转换与分配。该模块中设置有报警系统,当压力传感器发生断线、断路或压力过高、过低时,模块通过连接口发出报警信息,报警器采用KXH18(A)型声光报警器,实现故障时报警的功能。
1.2 阀门智能远程控制的软件设计
基于上述阀门智能控制的硬件设计,为了更方便阀门的控制,该研究进行研究了阀门智能远程控制的方法,设计了阀门智能远程控制系统的软件,软件系统包括客户监控端、网络云服务端、无线通信模块、局域网控制器和控制元件5大部分[9]。阀门智能远程控制的软件设计结构如图3所示。
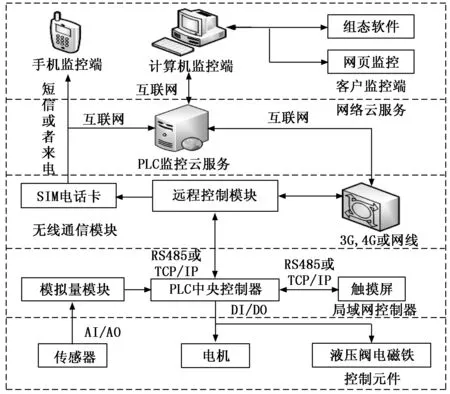
图3 阀门智能远程控制软件结构图
该系统在远程控制方面利用了PLC中央处理器及远程控制模块的方式。远程控制模块通过对阀门运行状态的采集,利用互联网等无线远程通信方式将状态信号反馈给与互联网相连的计算机监控端或手机监控端,进而实现阀门远程运行信号的智能统计,同时向相应的报警功能发出响应,系统响应的做出动作,实现“无人值守”的智能控制[10]。
该系统在无线通信模块中采用了电话卡、3G、4G网络,或者与无线网络直接相连和有限网络免插卡式上网。并且该系统支持以太网TCP/IP协议、RS485和RS232与PLC通信,且与大部分的PLC通信模式相互兼容,因此该系统的阀门采用了PLC中央处理器通信网络。远程智能控制系统的主要配置如表1所示。
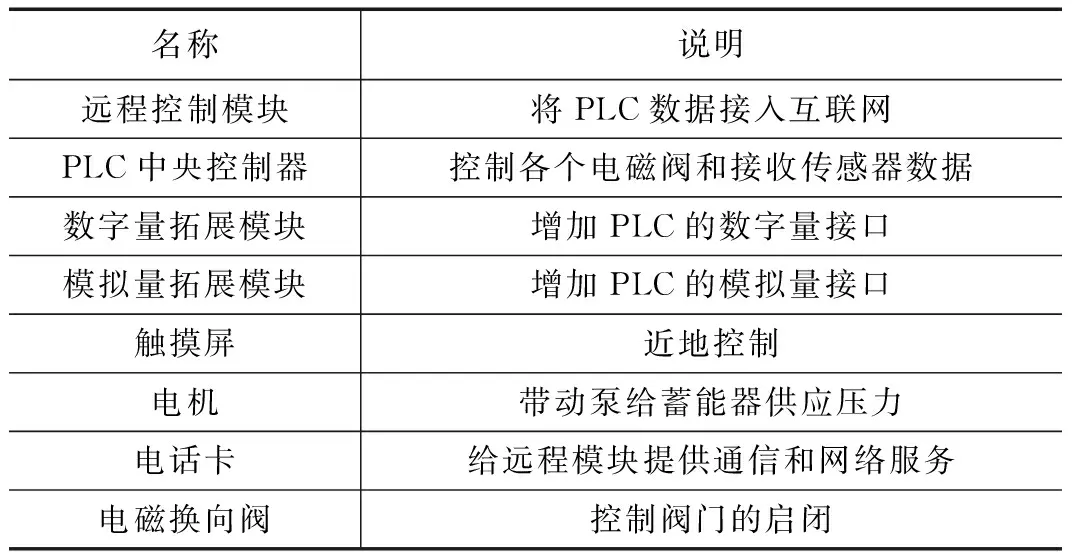
表1 远程控制系统的主要配置
为了能够很好地实现对阀门各元器件的智能控制以及相关数据的采集,该系统采用了PLC加装模拟拓展模块,使用DI/DO口与现场的阀门按钮和电磁继电器相连接实现阀门上的电磁铁和电机的启动与关闭控制,使用AI/AO口主要完成对传感器中的数据采集,并通过RS485与现场控制阀门的触摸屏相连接,进而实现阀门的现场手动智能控制。将远程模块与PLC的另一个RS485通信端口相连接,实现互联网的通入,同时可以完成PLC中寄存器内数据的存储及修改,进而实现互联网终端智能手机或计算机对阀门的远程智能控制[11]。
该系统的软件程序采用的是PLC编程,主要控制远程模块与PLC建立联系并实现数据采集,PLC编程主要分为远程和现场,远程主要由手机或计算机网页经过互联网控制,远程进行控制时近地的按钮将会不起作用。采用向远程控制发出脉冲信号复位的操作,进而PLC不会转换为近地控制。若远程模块在1 min内得不到信号响应时,将自动切换到近地的控制[12]。此外采用系统中的UPS紧急电源可进行对断电设备持续供应短时电能,实现阀门的紧急关闭,并且在所有的远程控制通信中都能够实现紧急情况的监控。
该系统在远程模块的编程中,采用RS485的coml口与PLC之间建立通信通道,利用COM1端口选取S7-200 PII协议,设定相关的波特率、从机地址等远程通信的有效参数,根据PLC的各变量寄存器地址值录入到PLC中,实现远程控制在网页中的监控,建立相应的变量组与子变量组,达到有序分类的目的。为了能够在网页中分析远程的各数字变量,在WEB端设置了按钮操作,在对应功能开状态时,设置显示的绿色按钮;在对应功能关状态时,设置显示的为红色按钮;并且在阀门自启动按钮、手动启动按钮和停止按钮之间需要互锁状态,因此远程模块箱PLC发送定时脉冲,采用定时器和时间控制器实现远程控制与近地控制的自动切换。
在软件部分还设计有监控界面,手机监控界面中设置了设备状态、远程控制状态、系统参数和模块状态。设备状态包括故障状态、按钮状态以及现场触摸屏的状态,实现方便观察阀门智能控制出现故障的原因,以及各种按钮在各种状态下的运行状况,利用手机APP或计算机网页可对阀门智能控制系统的状态进行监控,主要监控系统设备的运行参数、温度承受压力等信息,实现监控人员在线监视阀门智能控制的运行状态和远程预测系统的故障状态,实现阀门智能系统的实时监控。
2 基于自适应控制算法的阀门参数控制
由于在阀门系统正运行的过程中,每个阶段的状态都有运行的动态特性,同时,阀门所控制的气源和液源压力具有不稳定性的特点,并且阀门具有非线性因素,因此该研究使用自适应控制算法,实现阀门参数的自整定,在此基础上依据系统的响应[13],进而实现阀门的自校正,自适应控制的工作原理如图4所示。

图4 自适应控制的工作原理
该研究采用的是PID技术进行实现阀门参数的自整定,利用插进积分计算的继电方法,即阀门智能控制系统的输入频率、幅值已知的三角波信号,控制系统输出、等幅振荡的条件为:
(1)
通过式(1)可有效地控制系统输出的信号与等幅振荡。
ω90处频率响应的幅值为:
(2)
式中,k90表示在ω90处的频率响应幅值,通过该式子进一步对幅值的控制。
因此,可以计算出PID参数为:
(3)
式中,a表示振幅在测量输出信号峰值取得,T表示周期在测量系统输出两次回到工作点的时间所得,d表示三角波峰值与半周期的比值,j表示常数,ω90表示90°时,频率响应的幅值,对于阀门控制系统,相位裕度φm取30~50°,幅值裕度Am则取2~5。通过该式能够实现对参数的初步自整定。
阀门智能控制系统在控制过程中,由于气源压力的不稳定性和非线性,要求阀门控制参数通过自整定参数初值,进行实时自校正。
将系统响应误差分为两个阶段:
当智能阀门系统输出的值在15%误差以外时,采用Bang-bang控制,打开或关闭压点比例阀,全速放气或充气进而提升阀门的定位响应速度[14]。
当智能阀门系统误差在15%误差范围内,利用自适应PID控制方法,把误差e和误差变化率ec看做输入,采用模糊规则对PID参数进行整理[15]。
系统通过12位A/D采样将输入和反馈变换为量化值0~(212-1),故e的变化范围在0~4 095,而ec在0~2 000,对e和ec量化值进行归一化处理。

(4)
由控制经验Δkp,Δki,Δkd的变化分别在(-0.4~+0.4),(-0.8~+0.8),(-0.25~+0.25)区间内,亦将其归一化在区间(-5,5)内。
定义系统e′,ec′,Δkp,Δki,Δkd的变化范围为模糊集的论域,则:
e′,ec′,Δkp,Δki,Δkd=
{-5,-4,-3,-2,-1,0,1,2,3,4,5}
(5)
模糊子集为:
e′,ec′,Δkp,Δki,Δkd=
{NB,NM,NS,O,PS,PM,PB}
(6)
根据控制经验建立Δkp,Δki,Δkd的模糊规则表[16],定义e′,ec′,Δkp,Δki,Δkd,并服从正态分布,确定论域内各元素对模糊变量的隶属度,建立模糊控制表。采用重心法去模糊化,得到PID参数的修改正确的值[17],利用查询表的方法在微控制器中完成智能阀门的参数控制,即:
(7)
式(7)中,将Δkp,Δki,Δkd的变化分别控制在(-0.4~+0.4),(-0.8~+0.8),(-0.25~+0.25)范围内,则可实现智能阀门的参数控制,进而提高智能阀门的安全性能[18]。通过对Δkp,Δki,Δkd模糊指标的控制,进而实现阀门参数的智能控制,首先通过对相位与幅值的取值,采用PID控制参数初始化,利用式(7)检测获得相应曲线,得到阀门开度的局部放大,实现更好的抑制系统的超调能力,实现阀门参数的自整定与实时校正[19]。
3 实验结果与分析
系统的实验与调试是完成系统必不可少的一个步骤,该研究通过实验进行对系统的调试,并验证系统在实际应用中的可行性,实验前首先对实验做出准备,进行对实验平台的搭建,利用SiliconLaboratories IDE作为实验的开发平台,该开发平台既能够实现对硬件的仿真,又能实现对软件程序的编程[20]。本次实验的实验环境参数如表2所示。
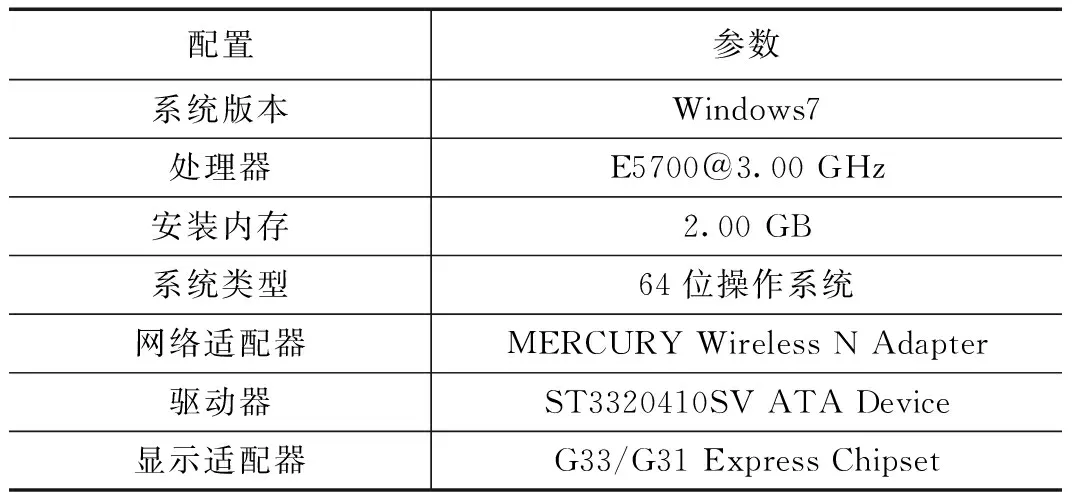
表2 实验环境参数
实验架构如图5所示。

图5 实验架构示意图
进行实验时采用的实验数据为某水电厂的智能阀门运行数据[21],实验数据如表3所示。

表3 实验数据
基于实验前的准备,接着进行对实验的验证,首先进行对阀门智能控制的误差进行测试,测试结果与文献[1]和文献[2]的结果进行对比[22],实验结果对比如图6所示。

图6 实验结果对比图
由图6可知,该研究的系统在进行阀门智能控制位置测量的误差实验中,在随着采样时间的不断变化中,阀门位置误差均低于10%,且较稳定,并且误差最大为9%,智能阀门控制的定位精确度较高[23];文献[1]在进行对智能阀门控制位置定位中的测试实验中,在随着采样时间不断变化时,阀门位置的定位误差也不断变化,并且误差的变化不稳定,最大误差为35%,与该研究的系统相比存在着较大的差距;文献[2]在进行对智能阀门控制位置定位中的测试实验中,在随着采样时间不断变化时,阀门位置的定位误差也不断变化,并且误差的变化也不稳定,最大误差为25%,与该研究的系统相比存在着很大的不足[24];由此可见该研究的系统在智能阀门定位控制时精确度较高。
基于上述对智能阀门定位位置误差的实验上,对系统远程控制的响应时间进行测试,实验结果与文献[1]和文献[2]进行对比,实验结果对比如图7所示。
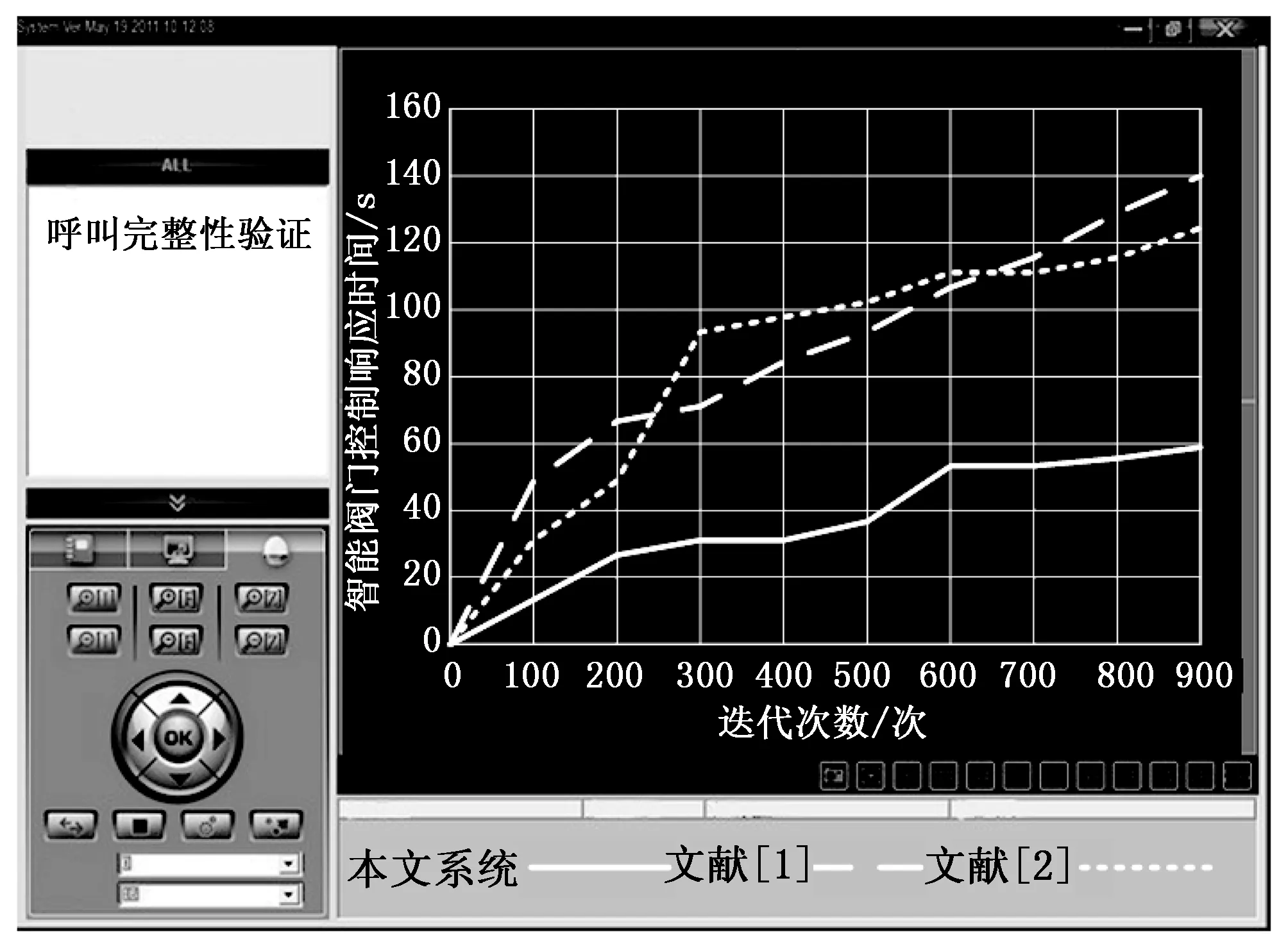
图7 实验结果对比
由图7可知,该研究的系统在进行系统远程控制的响应时间测试中,系统响应时间随着迭代次数的增多响应时间逐渐上升,并且在迭代次数为900次时,系统响应时间为60 s[25];文献[1]在进行对智能阀门远程控制响应时间测试中,在系统迭代次数为900次时,智能阀门远程控制响应时间为140 s,与该研究的系统相比存在着较大的缺陷;文献[2]在进行对智能阀门远程控制响应时间测试中,在系统迭代次数为900次时,智能阀门远程控制响应时间为125 s,与该研究的系统相比有一定的差距[26];由此可见,该研究的系统对于远程控制中响应速度较快,并且性能较好。
4 结束语
为了解决传统机械式手动阀门工作效率低,安全性能差的问题,该研究对阀门智能控制进行了研究,设计了基于信息技术的阀门智能控制系统,采用微控制器技术,实现了智能阀门的数字控制和智能控制;利用CAN总线技术,构建两级总线智能阀门控制系统,实现智能阀门的集中控制,利用软件系统,进行设计了智能阀门的远程控制,实现了智能阀门的远程操作,最后利用自适应控制算法,实现阀门参数的自整定,在此基础上依据系统的响应,进而实现阀门参数的自校正。
该研究的系统还存在着一定的不足,在进行远程控制时,由于运行数据量较大,系统会出现发热现象,因此在今后的研究中会做进一步的改进。
猜你喜欢
军事文摘(2022年20期)2023-01-10 07:18:38
流程工业(2022年3期)2022-06-23 09:41:08
英语文摘(2021年11期)2021-12-31 03:25:18
煤气与热力(2021年3期)2021-06-09 06:16:18
学生天地(2018年19期)2018-09-07 07:06:30
中学科技(2014年11期)2014-12-25 07:38:53
太空探索(2014年3期)2014-07-10 14:59:39
筑路机械与施工机械化(2014年4期)2014-03-01 02:59:05
自动化博览(2014年9期)2014-02-28 22:33:17
自动化博览(2014年4期)2014-02-28 22:31:15