
RASS 测量技术在空管一二次雷达性能评估中的应用
2022-07-08 03:04唐凯冯军岗
电子技术与软件工程 2022年1期
唐凯 冯军岗
(民航空管技术装备发展有限公司 北京市 100015)
随着雷达系统的复杂程度越来越高使雷达现场的环境情况不断变化,同时不断增加的空中交通流量,使得ATC 系统的总体质量控制变成一项十分重要但又非常困难的工作。为此,民航局空中交通管理局引进了比利时IE 公司的RASS系统,用于对空管一二次雷达性能状态进行在线检测评估和分析。
1 一二次雷达系统
截至2020 年底,民航空管体系已经投产运行的一/二次合装雷达30 套,单二次雷达110 套,至2025 年,空管一二次雷达将达180 余套。以欧制进口ELDIS-RL2000/MSSR1一二次雷达系统为例,整机由天馈系统、发射接收系统、雷达信号处理和录取系统构成。
1.1 一次雷达
一次雷达系统使用长短脉冲调制波和双弯曲赋形反射面天线向空中发射电磁波探测目标,目标(飞机)把雷达电磁波能量的一部分(雷达回波)向雷达的方向反射,雷达接收后处理这些微弱回波,进行滤波采样、脉冲压缩处理、相参处理、回波自适应动目标检测和点迹处理等,形成目标点航迹并计算距离、速度、角度等信息。
1.2 二次雷达
二次雷达系统使用大垂直口径单脉冲阵列天线向飞机发射编码询问信号,飞机机载应答机接收到询问信号并发出应答信号,二次雷达在接收到应答信号后,检测和分辨框架脉冲,鉴别真实应答、窜扰/副瓣/幻影等应答,并对有效框架脉冲内的编码信息进行解码来确认飞机的完整信息,形成飞机点迹和航迹数据,获知飞机的高度、识别码等各类信息。
1.3 雷达数据格式
目前我国民航监视设备的数据传输标准格式为ASTERIX(All purpose STructured Eurocontrol Radar Information eXchange),是欧洲民航组织用于监视设备和自动化设备的数据通信格式,包括CAT01/02 和CAT34/48 数据类。CAT01数据类用于一二次雷达的点航迹信息目标报告,CAT02 数据类用于雷达监视服务信息,随着S 模式二次雷达的应用,EUROCONTROL(欧洲空中交通管制组织)新增CAT48 作为CAT01 的升级版,CAT34 作为CAT02 的演进版本,相关定义参见雷达数据传输欧控标准手册,这里不再赘述。
2 RASS雷达分析支持系统
RASS 是一套能够在雷达设备运行状态下的测试工具和方法,用于在线检测评估空管一二次雷达性能状态,可实现雷达全性能测试评估。适用于每个雷达制造商的雷达,独立于雷达制造商以外减少对生产厂家的依赖,并被Eurocontrol和FAA(美国联邦航空局)认可,符合ICAO(国际民用航空组织)标准。系统包含RASS-S 应用软件、RASS-R 数据实时监测分析应用软件、RFA(641)雷达外场分析仪、RFT(646)雷达射频测试仪、RGI(596)雷达陀螺仪和倾角计、RER(794)雷达编码器记录仪和UDR(600)USB 数据记录仪等等。如表1 内容所示,利用RASS 系统可完成在雷达日常/换季维护维修时期、安装调试和交接验收阶段的系统性检测评估。

表1:雷达性能检测评估表
3 雷达系统性能评估方法
3.1 雷达整机性能评估
3.1.1 覆盖范围
雷达理论覆盖范围根据天线特性、站点海拔和地形地貌测算,与雷达站各方位角度内的地形障碍和高程角度有关,通过RASS-R 软件加载雷达扇区遮蔽角文件hrscr-file 和站点地形图文件relief map file,计算出本站二次雷达理论威力范围,可为雷达设备更新以及建设规划提供理论依据。
3.1.2 数据质量
雷达数据质量包含探测概率PD、方位精度、距离精度、虚警假目标、跳点、反射、二次解码有效性等等,为最大限度提高数据分析的可靠性,ICAO 和EUROCONTROL 规定,在低密度交通区域数据录取时长不低于4 小时,至少包含50000 采样数据和200 条航迹,且每条航迹保持5 分钟以上。利用UDR 数据记录仪与RASS-S 应用软件在线对雷达输出的CAT01/02 或CAT34/48 数据进行记录,通过RASS-S或RASS-R 软件将的数据格式转换成.s4 file,配置RASS-R软件Radar Comparator Mono 工具参数,加载.s4 file 数据包进行雷达信号质量的统计和评估。
3.1.3 检测方法
具体检测方法如下:
(1)设备连接。将雷达串口输出通过串口转网口模块连接至UDR 数据记录仪,UDR 通过USB 接口连接至安装有RASS-S 软件的电脑。
(2)数据记录。雷达置于正常工作状态,打开RASS-S软件,点击Serial Data-Serial Protocol Recorder(UDR),在UDR 控制界面配置波特率后,点击开始运行记录数据。
(3)格式转换。数据录取结束并保存,关闭UDR控制界面,在RASS-S 界面点击Serial Data-Convert Data Recording,在弹出的窗口里,将刚保存的雷达串口数据转换为RASS-.S4 file 文件。
(4)生成理论覆盖地图文件。运行RASS-R 软件,打开Coverage Map Calculation 工具,Cme Data Path 选择strm_V2.1,自建Destination Path 存储路径,Map Origin 输出雷达站点经纬度和天线塔海拔高度,点击开始生成雷达扇区遮蔽角文件hrscr-file 和站点地形图文件relief map file。
(5)软件参数配置。将格式转换后的数据文件RASS-.S4 file 复制到Campaign-S6DataRaData 下,打开RASS-R 界面的Radar Comparator Mono 工具,指定根目录Campaign-S6,设置Data Path 为Campaign-S6DataRaData,Node-Parameters 输入雷达站经纬度、塔高和天线转速,Data type 选择PSR、SSR、Modes 或其他项,Coverage 选择站点地形图文件relief map file,Screening 选择雷达扇区遮蔽角文件hrscr-file,其余参数默认。
(6)数据分析。在Radar Comparator Mono 界面点击执行,将自动进行数据统计分析。
3.1.4 评估实例
探测概率PD、方位/距离精度、假目标、跳点、反射、解码有效性等结果可以以表格或图形方式在各自选项中体现。在RASS 系统中,探测概率Pd Cell 图是在雷达各方位距离窗口对真实点迹/航迹进行统计分析得出的,值得注意的是,在没有真实目标的区域将不会统计Pd 值。
图1 为某空管二次雷达站理论覆盖范围和所辖区域内实际航线图,雷达实际覆盖图是由雷达真实点/航迹信息的数据形成,通过理论和实际覆盖图的对比分析,评估出高度分层、实际探测距离、顶空盲区、远距离低空盲区、遮蔽角、威力边缘跟踪连续性情况。

图1:雷达水平覆盖范围
3.2 分系统性能评估
3.2.1 接收系统
RASS 系统能够自动测量计算接收机各项参数通过分析曲线,评估各通道接收机性能和匹配程度。测试时,一二次雷达触发脉冲作为RASS 设备的同步触发,RFA641 以信号源的形式输出一次雷达回波信号或二次雷达应答信号至接收机输入端,同时将接收机的输出视频连接至RFA641 的视频接口。
3.2.1.1 接收机灵敏度和动态范围
运行RASS-S 软件, 打开RX 模块下的Radar Rx Calibration & Sensitivity(RFA)工具窗口,选择测量的接收通道,通过功率编程使RFA641 的输出功率在7dBm 至-110dBm范围内逐级递减,并测量接收机输出视频信号的电压幅度,RASS-S 软件会自动构建出“输入功率”与“输出电压”的响应曲线,计算出接收机灵敏度和动态范围曲线。图2 为某空管二次雷达接收机(和、差、控制)灵敏度动态实测曲线,切线灵敏度-100dBm,动态范围92dB,符合空管二次雷达规范。

图2:灵敏度动态曲线
3.2.1.2 接收机带宽
以接收机线性区的视频电压幅度为基准,设置RFA641为扫频模式,实现输出频率步进连续变化,对接收机输出的视频信号电压进行测量,构建出“频率”与“衰减”的响应曲线,计算3dB、40dB 带宽。
3.2.1.3 STC 灵敏度时间控制
向接收注入测试信号,测试脉冲的延时由大到小变化,对接收机输出的视频信号电压进行测量,构建出“延迟”与“功率”的响应曲线,形成扇区测试图,分析评估雷达接收机在各个扇区的STC(Sensitivity time control)实现功能。
3.2.2 天线辐射场型
天线外场测试对周边环境要求较高,测试点与雷达天线之间需保证没有任何遮挡物,且尽量避免存在能导致信号反射的建筑或高山等等。本方法是在天线保持定速旋转、辐射时,将RASS 系统外场天线固定在距离雷达站0.5-40km 的一个合适地点且瞄准雷达天线的方向,通过RFA641 接收雷达电磁波,利用RASS-S 软件计算分析出高精度的雷达天线Σ、Ω 波束水平方向图,分析出雷达是否存在旁瓣/后瓣穿透、脉冲辐射强度比值、主波束3dB 波束宽度等参数,以此评估天线性能和潜在的故障。图3 为二次雷达天线实测图,图中红色曲线为二次雷达Σ 通道水平波幅度,浅绿色为Ω 通道水平波幅度,可见该雷达不存在旁瓣/后瓣穿透,理论上不会出现旁瓣假目标。
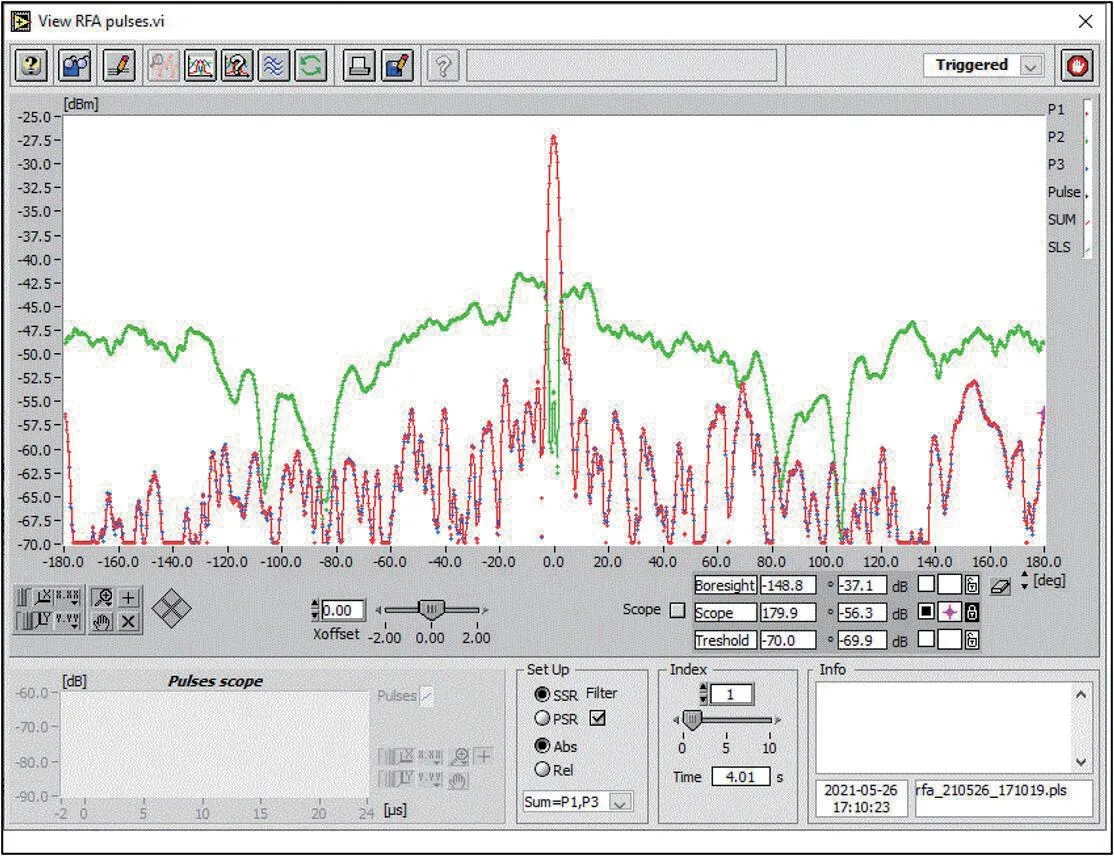
图3:天线水平方向HPD 图
3.2.3 机械特性
RASS 系统可以专门检测天线旋转匀速性、平稳性、编码器脉冲质量和方位精度。在天线转盘上固定放置RGI596雷达陀螺仪和倾角计跟随天线同步旋转检测角速度、水平性能,RER794 用来记录方位编码器ARP 和ACP 脉冲,通过RASS-S 软件Mechanical Gyro-Inclino Recording 和Analysis功能记录和分析雷达机械特性。检测方法如下:
(1)启动RGI596 陀螺倾角计,并固定放置在天线大盘水平基准面上。连接设置RER794 编码记录器,用于记录雷达ACP、ARP 脉冲。
(2)启动雷达,运行RASS-S 软件,打开Mechanical Gyro-Inclino Data Recording 模块,点击开始记录5 分钟以上;
(3)关闭雷达,取下RGI陀螺倾角计并将数据导入电脑。从Mechanical 功能模块中打开刚刚记录的文件,即可生成旋转角速度、水平度和方位编码器误差曲线。
4 结束语
目前该技术已在民航“十三五”期间监视信息探测系统的建设与运行得到应用,各站点测试评估报告被中国民航空中交通管理局认可。
相对于通用仪表而言,其具备技术先进、集成度高、功能完善、携带便捷等优点。未来将被民航系统广大雷达技术人员深入研究实践,通过RASS 与通用仪表的结合使用,能做到检测数据对比、优势互补,全面打造符合具有中国民航空管特色的空管监视技术装备性能评估体系,从而对雷达进行预防性维护、优化改进和提升雷达性能提供依据,达到雷达系统高质量高可靠性运行。
猜你喜欢
民航管理(2019年2期)2019-06-04
测控技术(2018年6期)2018-11-25
电子制作(2018年19期)2018-11-14
中国交通信息化(2017年10期)2017-06-06
电子制作(2016年1期)2016-11-07
电子制作(2016年1期)2016-11-07
系统工程与电子技术(2016年4期)2016-08-24
学习月刊(2016年19期)2016-07-11
现代防御技术(2014年6期)2014-02-28
河南科技(2014年22期)2014-02-27
