
一种多级特征辅助的精密测速方法
2022-07-08 03:35:16周明阳蔡玖良
电子技术与软件工程 2022年8期
周明阳 蔡玖良
(中国电子科技集团公司第十四研究所 江苏省南京市 210039)
1 引言
单脉冲测量雷达通过提取目标回波的多普勒频率得到目标速度,得益于雷达频谱纯度与相参技术的提高,在目标探测场景理想的情况下可以获得较高的测量精度。目前的目标测速方法一般采用闭环测量法,用窄带跟踪滤波器和二阶环路实现,在此基础上,针对多普勒频率捕获与跟踪之初,对跟踪频谱可能出现的多普勒频率模糊,利用测距数据微分得到的速度与测速数据相比较,平滑处理后估计模糊谱线数,进行速度消模糊。
在实际目标跟踪过程中,回波相位常因目标起伏导致相位质量下降,多散射点噪声、目标震动、信号遮挡等不利因素都可能导致测频误差甚至出现跳谱线,上述方法不能很好的适应这类复杂场景。
本文设计了一套精密测速流程,利用滑窗傅里叶变换进行速度测量,利用惯性滤波器进行滤波跟踪,精密测速;针对在多散射点、目标起伏等复杂场景下跳谱线问题,设计了一种完备的实时滑窗模糊纠正方法,利用点迹距离、信噪比、距离差拟合斜率、拟合系数等特征作为辅助,排除干扰,准确判断并估计速度模糊度。通过该方法可得到稳定可靠的速度信息。
2 闭环测速与速度跟踪系统
雷达采用单脉冲跟踪工作方式,每个驻留只包含单个脉冲,采用线性调频信号,利用多个驻留回波数据进行频率测量与测速。
设第n 个驻留发射脉冲波形为:

其中,A为回波幅度, 为回波时延,c 为光速,λ 为波长。则脉压后的回波为:
如果考虑目标加速度,回波频谱展宽,影响速度测量,需要先对加速度进行跟踪估计,使用加速度对回波进行展宽修正,再进行速度测量。加速度跟踪方法与速度相似,首先利用分数阶傅里叶变换、Wigner-Ville 分布等时频分析方法获得本次滑窗估计的目标加速度,再使用上述一阶惯性滤波器进行跟踪滤波。也可以根据速度测量偏差使用α-β 滤波器组成二阶速度跟踪环路,同步进行速度、加速度跟踪。
3 全程跳谱监测
考虑到初始目标速度误差可能跨多普勒,导致每帧速度跟踪结果与真实速度相差整数倍个Fλ/2,可以利用闭环测速积分与雷达测距距离的差值进行跳谱检测并纠正。另外,对于相位质量较差的复杂场景,在其跟踪过程中也可能出现跳谱现象,需要进行全程监测,且监测机制本身也需要剔除多散射点干扰、目标起伏、测距误差等影响。在此设计了全程的实时跳谱监测与纠正流程,准确得到测速误差,进行速度纠正。流程的关键点有:
3.1 点迹距离与滤波器预测距离比较
预测距离由雷达目标跟踪滤波器得到,在对上一帧数据进行滤波时产生。在信噪比较低时,滤波器产生速度、加速度的误差会造成预测距离的偏差,且具有一定的时间相关性,导致预测距离的偏差产生积累,积累偏差较大时会影响对测速误差的监测;点迹距离由回波检测后凝聚得到,与滤波预测距离相比,虽随机差较大,但时间相关性弱,不存在积累偏差。所以本方法使用点迹距离进行速度模糊估计。
3.2 “测速积分距离-点迹距离”差值曲线拟合斜率与拟合系数
测速无模糊时,测速积分距离与点迹距离差值所得直线斜率为0;而当出现模糊且模糊度为M 时,差值斜率为M倍的模糊速度。利用“差值斜率为模糊速度的整数倍”作为先验信息对拟合斜率与模糊速度的关系进行限制,可以有效提高速度模糊的识别准确性。
另外,若距离差值出现波动或异常值时,会造成模糊度估计偏差。利用拟合系数约束可以有效避免此问题:当拟合系数低于某一门限时,判断此次距离差值线性度差,斜率估计值可靠性差,不使用此次估计斜率纠模糊。
3.3 信噪比过低判断
在信噪比较低甚至在目标所在距离单元无检测点时,都可能引起距离差拟合窗中出现异常点,导致斜率估计错误或得到的拟合系数过低。而对于信噪比起伏大的目标,这种情况发生频繁,影响模糊纠正。
本方法在设置距离差值窗的同时,设置了低信噪比标识窗,对于检测信号幅度低于某一门限或者未检测到目标的数据帧,在纠模糊判断时被丢弃,不参与距离差值窗的线性拟合,减少过低信噪比异常点的影响。
跳谱监测的流程设计如图1。
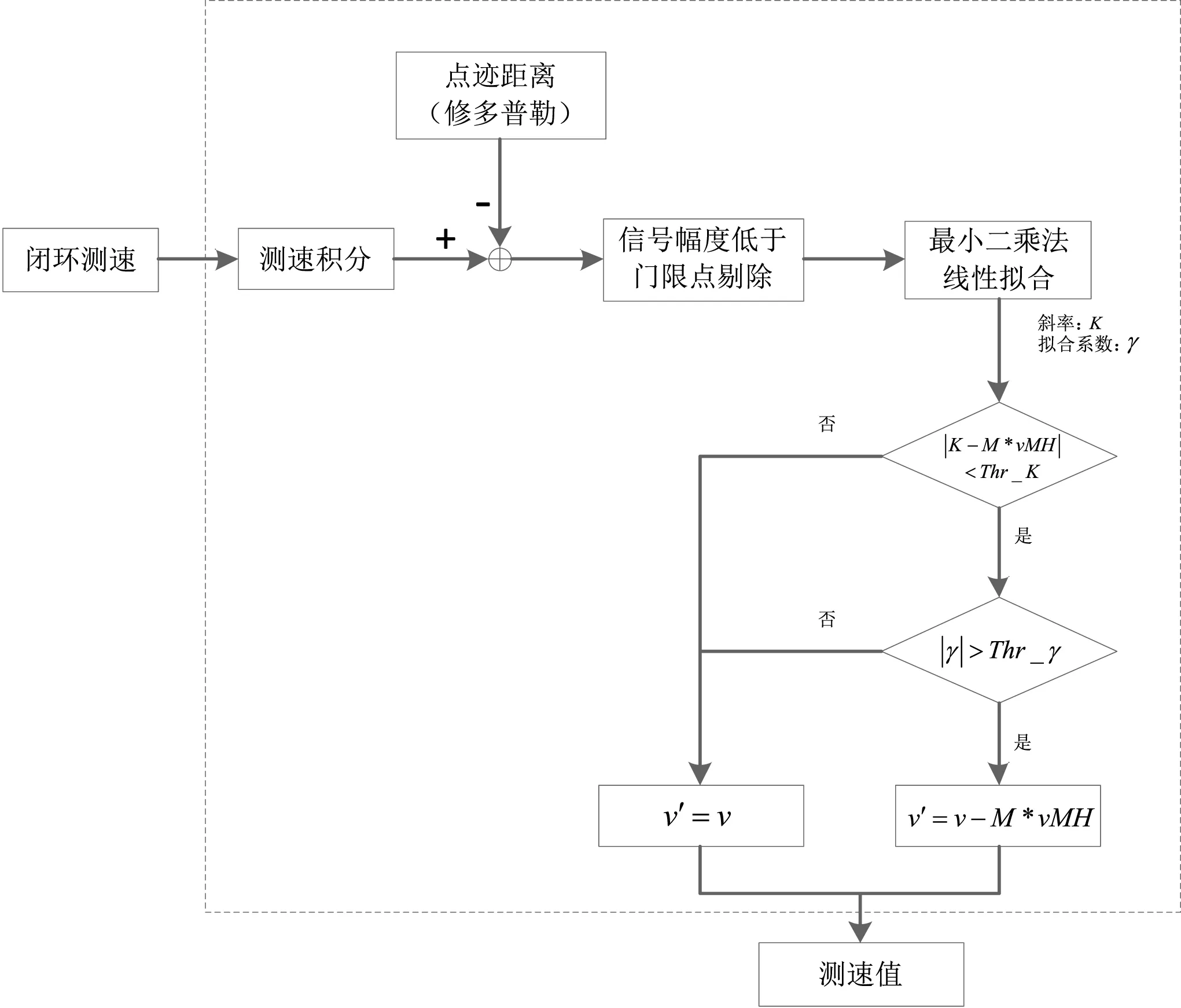
图1: 跳谱监测流程框图
具体步骤如下:
(1)对闭环测速值持续积分;
网络课堂的课程选择也可以不局限于学生本专业的专业选修课,特别是需要在课堂内容中引进国学、音乐、科技方面的课程,使学生在学习理论的同时进行深层的知识拓展,在知识拓展的过程中拥有高方向的个人视野。
(2)计算目标点迹距离,并完成多普勒距离修正;
(3)滑窗记录测速积分与点迹距离的差值以进行全程速度模糊监测;
(4)计算纠模糊窗内信号幅度,低于门限点进行剔除;
(5)窗内剩余点利用最小二乘法完成线性拟合,计算得到拟合直线斜率K 与拟合系数γ;
(6)比较斜率与速度模糊值,若斜率与速度模糊值的整数倍偏差小于门限Thr_k,则满足斜率要求,继续下一级判断,否则,判断无模糊;
(7)判断拟合系数是否大于门限Thr_γ,若大于则认为线性度满足,可以进行模糊度计算,否则,判断无模糊;
(8)根据判断结果进行纠模糊处理,v'为最终测速值。
4 仿真分析
利用本文测速方法对某雷达探测目标所记录回波数据进行仿真处理,完成功能验证。试验中选择非球形星作为探测目标,其回波起伏较大,多散射点互相干扰,可以验证本方法的处理效果。试验中卫星从远处进入雷达探测范围,过捷径后离开。

图2: 本文方法测速效果
截取有速度模糊的一段数据展示低信噪比对“测速积分距离-点迹距离”差值产生的影响以及本文方法针对性处理的效果。
如图3 所示,若对此段距离差值曲线直接进行线性拟合,拟合效果见图3(a),图3(b)为相应时间段的目标回波幅度。图3(a)中可见在0.4s 左右出现多个异常点,此段与图3(b)中回波幅度较低处(噪底约为30dB,被噪声污染严重)相对应;从拟合斜率可以判断此处出现了速度模糊,但由于拟合直线斜率为模糊速度的1.49 倍(非整数倍),且拟合系数仅为0.08,无法准确识别模糊度。

图3: 低信噪比对距离差值拟合产生的影响
按照本文方法,设置低信噪比标识窗,依照信号幅度与门限大小关系置标识位,低信噪比异常点不参与距离差值窗的线性拟合。去掉异常数据帧后再进行拟合,所得拟合斜率为模糊速度的1.09 倍,拟合系数高达0.8,如图4 所示。

图4: 去掉低信噪比异常点后的拟合效果
由于此时计算出的拟合斜率可信度较高,可更准确地估计速度模糊度,及时纠正模糊,保证测速稳定度与精度。
5 结论
本文设计了一种精密测速方法,利用滑窗傅里叶变换进行速度估计,利用一阶惯性滤波器进行跟踪滤波,可以得到较高精度测速值;针对多散射点、目标起伏等复杂场景下可能出现的多普勒模糊问题,设计了一种完备的实时模糊纠正方法,利用点迹距离、信噪比、距离差拟合斜率、拟合系数等作为辅助特征,排除干扰,准确判断并估计速度模糊,保证了测速稳定度与精度。利用实测数据验证了方法的有效性。
猜你喜欢
高师理科学刊(2020年2期)2020-11-26 06:01:32
物理之友(2020年12期)2020-07-16 05:39:16
北京航空航天大学学报(2019年9期)2019-10-26 02:30:12
电子测试(2018年11期)2018-06-26 05:56:02
雷达学报(2017年3期)2018-01-19 02:01:27
中成药(2017年6期)2017-06-13 07:30:35
福建中学数学(2016年7期)2016-12-03 07:10:28
光学精密工程(2016年1期)2016-11-07 09:01:53
电测与仪表(2016年6期)2016-04-11 12:05:54
西南石油大学学报(自然科学版)(2015年5期)2015-04-16 05:12:24
