
智能化高空作业平台安全控制策略研究★
2022-07-07 07:49宋吉超宋卓宇周成才杨金森
现代工业经济和信息化 2022年5期
宋吉超,宋卓宇,周成才,杨金森
(柳州铁道职业技术学院动力技术学院,广西 柳州 545000)
引言
随着高空建筑物的增多,需要对高空设备进行相关操作,高空作业平台可以高效、安全的解决这一问题。特别是我国老龄化的加速,建筑工人日益短缺,该设备极大节约了人力、物力且安全性远高于传统高空作业设备,被业界公认为是工程机械领域最后一片蓝海,极具研究价值与发展潜力。
随着人工智能、物联网技术的普及与发展。工程机械智能化是其未来发展的趋势。具有自动驾驶、智能作业的起重机、挖掘机、压路机等智能化的工程机械陆续被各大厂商推出。其中高空作业平台与上述工程机械最大的区别在于,在实现相关智能化的同时,必须确保数十米高的作业平台的安全性,如图1所示。本文以矗峰重工CFPT系列自行走高空作业平台为研究对象,在平台实现智能化功能时,提供相应的安全控制策略,使平台满足相关作业需求。
1 车辆运动学模型控制策略分析
本文所研究高空作业平台智能化功能主要包含自动驾驶、路线规划和急停避障。这就要求平台在运动的同时,数十米的高空作业平台倾摆角度、速度、加速度等方面均要达到一定要求,不然必然会造成高空作业的不稳定。传统PID控制很难在这多个方面同时达到要求,而LQR控制在倒立摆控制实验中,取得了优良的控制效果,如图2所示。
倒立摆与高空作业平台运动特点均是底盘运动并控制上部刚体达到一定的平稳性,两者运动特点相识,故本文采用LQR对高空作业平台进行控制。LQR控制器原理为;LQR即Linear Quadratic Regulator线性二次型调节器。对于给定的线性定常系统,其数学模型可描述为:
LQR控制器可以实现寻找到最优控制,使得系统由指定初始状态开始,让如下二次型性能指标取得最小值:
式中:Q为半正定的状态加权矩阵,矩阵中的元素越大意味着跟踪误差能够更快的趋近于零。R为正定的控制加权矩阵,矩阵中的元素越大意味着控制输入会越小。
为使式输出J达到最小,构造哈密顿函数为:
对哈密顿函数求导并求极值,可得:
式中:λ(t)=-P(t)x(t)。其中P(t)为黎卡提方程:PA+ATP-PBR-1BPT+Q=0的解。
则,LQR控制器最终控制率为:
式中:K=[k1,k2,k3,k4]为LQR的增益。
2 控制策略仿真
本文采用矗峰重工CFPT1416高空作业平台为研究对象,平台的相关指标、参数如表1所示。
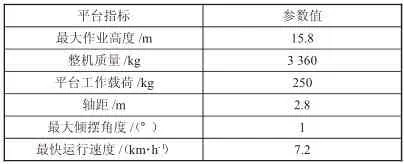
表1 高空作业平台关键指标
经现场测验,平台智能化功能中,对整个平台系统安全性造成最大影响的工况为:平台以最快运行速度全高行驶时(即15.8 m的最大作业高度),急停避障所造成平台55'的倾斜摆动。平台安全标准中,最大倾斜摆动不能超过1°。故选取此极限工况,在simulink中搭建LQR控制模块对平台进行安全控制,仿真结果如图3所示。
由图3可知,在平台急停避障的极限工况下,平台产生55'的倾摆,同时惯性的影响,会使平台产生残余加速度及速度。LQR控制器可以使平台的倾摆角度、速度、加速度在不到1 s的时间内,迅速稳定在0值。且在控制过程当中,平台反向倾摆未超过10',速度与加速度也未发生过大的超调与剧烈的振荡。LQR控制器对平台倾摆角度、速度与加速度起到了优良的控制效果。
3 结论
由上述分析可知,高空作业平台因其运动特点与高空作业情况,对其安全控制有着严格的要求。而LQR控制器所采用的最有控制思想可以很好的满足高空作业平台的控制要求。故文本以矗峰重工CFPT1416高空作业平台为研究对象,在急停避障平台产生55'倾摆角度的极限工况下,采用LQR控制,在simulink中搭建控制仿真工况,使平台的倾摆角度、速度、加速度在1 s内趋于平稳,控制过程中各控制量未产生过大超调与剧烈振荡,LQR控制对高空作业平台的极限工况达到了良好的控制效果。
猜你喜欢
能源工程(2022年2期)2022-05-23
现代电力(2022年2期)2022-05-23
商品与质量(2021年43期)2022-01-18
表面工程与再制造(2019年1期)2019-12-04
工业设计(2019年4期)2019-06-11
电子制作(2018年19期)2018-11-14
汽车观察(2018年9期)2018-10-23
消费导刊(2018年10期)2018-08-20
山东工业技术(2016年15期)2016-12-01
中国机电工业(2016年9期)2016-12-01
