一种内燃电力双动力动车组制动系统设计
2022-07-07 02:35张国庆
铁道车辆 2022年3期
张国庆,李 丰
(中车青岛四方机车车辆股份有限公司 技术中心,山东 青岛 266111)
近年来,南美市场对内燃电力双动力动车组的需求逐渐增多。为满足用户运用需求,发挥产品系统技术优势和经济效应,便于用户快速掌握操作方法和降低后期维保成本,搭建制动系统技术平台很有必要。
内燃电力双动力动车组能适应动力包和电网2种供电方式,能够满足动车组在非电气化和电气化区段间穿行混跑的需求。动车组电气牵引和电制动采用交流电传动系统,电制动优先采用再生制动,制动能量反馈电网,当电网不能吸收时开通制动斩波器,把多余的能量通过制动电阻消耗掉。
本文在充分调研出口智利的内燃电力双动力动车组、电动车组、内燃动车组以及出口阿根廷的电动车组等项目设计和运用经验的基础上,搭建了一种内燃电力双动力动车组制动系统技术平台,重点对风源系统、制动控制系统及基础制动装置进行了介绍。另外,针对动力包供电和电网供电产生的电制动形式不同,使常用制动和快速制动时电制动和空气制动实时配合,满足各项制动指标要求。
1 概述
车辆最高运行速度:电网供电模式下为160 km/h;动力包供电模式下为140 km/h。在定员载荷、干燥、平直道工况下,列车速度从160 km/h降到0的平均减速度:最大常用制动减速度≥0.80 m/s2;快速制动减速度≥1.20 m/s2;紧急制动减速度≥1.40 m/s2。车辆编组形式为2动2拖:Tc1+Mp1+Mp2+Tc2。
制动系统主要由风源系统、制动控制系统及基础制动装置组成。每辆Tc车设置1台空气压缩机组提供压缩空气,采用双塔式干燥器对空气压缩机产生的空气进行净化;制动控制系统采用微机控制的直通式电空制动系统,基于网络及硬线冗余控制,制动力控制方式采用架控控制方式,制动力管理采用全列制动力分配,采用故障导向安全的原则进行设计;基础制动装置采用盘形制动。
制动系统采用双管供风模式,总风管和列车管贯穿全列。总风管压力为750~900 kPa,列车管定压为500 kPa。制动系统具有常用制动、快速制动、紧急制动功能,能够按照车辆载荷变化、冲动限制等自动调整制动力,能够根据司机控制器和外部输入指令进行制动和缓解控制。另外还具有保持制动、停放制动、乘客紧急制动、磁轨制动、超速控制、撒砂控制、机车及同型号动车组救援等功能。
2 风源系统
2.1 风源设备
在Tc1和Tc2车各配置一台无油活塞式空气压缩机组,为制动系统及其他用风设备提供压缩空气。图1为风源系统气路原理图,主要包括空气压缩机组、软管、总风缸、压力开关和压力传感器等。空气压缩机组内部的双塔式空气干燥器用于净化送至总风缸的压缩空气,安全阀A03(1 200 kPa)和安全阀A11(1 050 kPa)用于确保空气制动系统不会出现超压和受损。除了手动排水塞门外,总风缸还设置自动排水阀,可根据风缸内气压变化自动进行排水。

A00.空气压缩机组;A01.空气压缩机;A02.软管;A03、A11.安全阀;A04.双塔式空气干燥器;A06.总风缸;A06.01.手动排水塞门;A08.测试点;A09.压力开关;A10.压力传感器;A14.自动排水阀。
2.2 空压机启停管理
空压机启停采用单双日控制方式,TCMS根据单双日信息和电子制动控制单元(EBCU)传输的总风压力控制空压机启停。单日以Tc1车空压机为主,Tc2车空压机为辅;双日以Tc2车空压机为主,Tc1车空压机为辅;网络故障情况下,空压机启停由压力开关进行控制。
2.2.1 网络正常模式
空压机启停由TCMS控制:当总风压力低于(800±20) kPa时,主空压机启动;达到(900±20) kPa时,主空压机停止工作;若主空压机工作时,总风压力仍持续降低至(750±20) kPa时,辅空压机也启动,压力达到(900±20) kPa后,2台空压机停止工作。
2.2.2 网络故障模式
由压力开关进行控制,当总风压力低于(700±20) kPa时,2台空压机同时启动;总风压力达到(900±20) kPa时,2台空压机停止工作。
3 制动控制系统
每辆车安装1套辅助控制单元、2套BCU和2套EBCU。辅助控制单元和BCU气路原理图分别见图2和图3。制动控制系统以转向架为单位进行制动控制,每台转向架可以单独进行制动控制。辅助控制单元主要用于制动供风、停放制动控制和空气弹簧供风。BCU根据EBCU计算的空气制动需求将制动供风压力转换为制动缸压力。
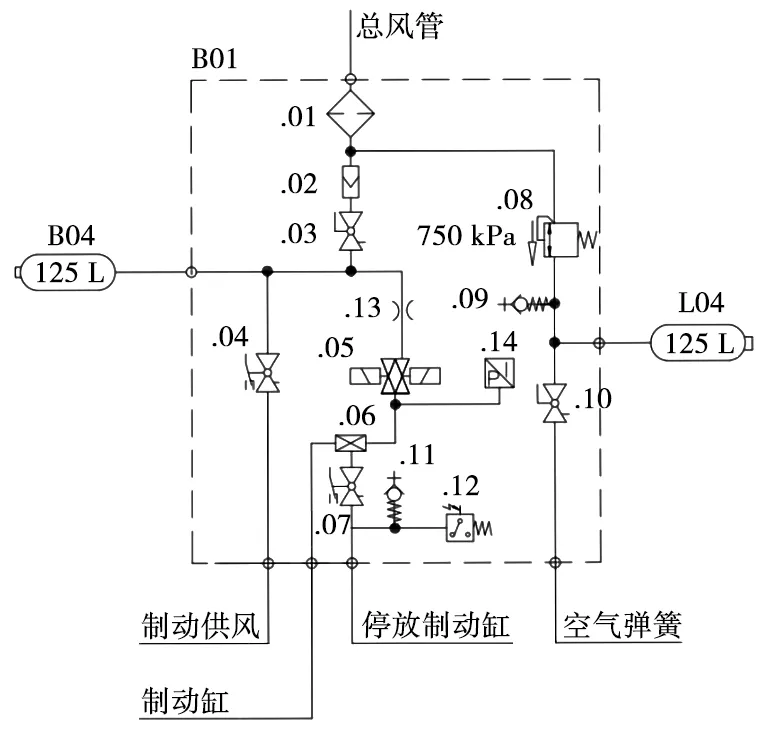
B01.辅助控制单元;B04.制动风缸;L04.空气弹簧风缸;B01.01.空气过滤器;B01.02.单向阀;B01.03、B01.04、B01.07、B01.10.截断塞门;B01.05.双脉冲电磁阀;B01.06.双向止回阀;B01.08.溢流阀;B01.09、B01.11.测试点;B01.12.压力开关;B01.13.缩堵;B01.14.压力传感器。

B05.BCU;B06.EBCU;B05.A.EP转换阀;B05.D.中继阀;B05.E.紧急电磁阀;B05.F.载荷调整阀;B05.K.压力传感器。
3.1 常用制动
常用制动通过司机控制器进行操纵,采用电制动与空气制动复合的控制方式,优先使用电制动,当电制动能力不足时,由空气制动进行补充,以减少基础制动磨耗。电网供电时电制动优先使用再生制动,制动能量反馈至电网,如果再生制动不可用或制动的能量超出电网吸收能力,则自动转换为电阻制动,通过制动电阻将能量消耗;动力包供电时电制动为电阻制动。
如图4所示,在Mp1和Mp2车各设置1套牵引控制单元(TCU),制动级位指令同时发给TCMS、TCU及EBCU,TCU通过列车网络MVB将电制动能力值(及有效位)和电制动实际值(及有效位)发送给EBCU。EBCU根据制动级位、电制动实际值、载荷信号、冲动限制(常用制动列车纵向冲击率≤0.75 m/s3)等计算是否需要补充空气制动力以满足总制动力需求。根据EBCU的空气制动需求,EP转换阀将制动供风压力转换为成比例控制的预控压力,并到达中继阀,从而控制制动缸进行充排风。
当TCU检测到电制动滑行时,发出“电制动滑行”信号并减少电制动力直至电制动滑行消失;当EBCU检测到滑行时间超过1 s,制动系统通过MVB网络和硬线同时发出电制动切除指令,并进行空气制动滑行控制。

图4 EBCU、TCU、TCMS之间逻辑关系图
电网供电和动力包供电模式下电制动力随速度变化曲线分别见图5和图6。

图5 电网供电模式下电制动力随速度变化曲线
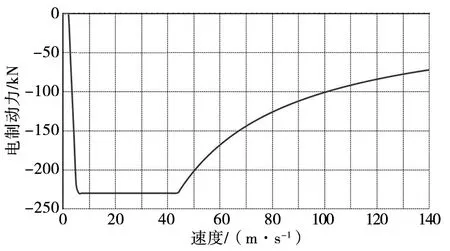
图6 动力包供电模式下电制动力随速度变化曲线
3.2 快速制动
快速制动采用电制动与空气制动复合方式,优先采用电制动,由贯穿全列的快速制动回路进行控制,以实现较大减速度,使列车尽快停下,触发条件如下:(1)司机控制器手柄施加;(2)总风压力低于600 kPa;(3)未选择驾驶模式;(4)警惕装置动作;(5)未选择驾驶方向;(6)制动控制装置严重故障;(7)牵引、制动信号不一致;(8)司机控制器故障触发;(9)救援模式下列车管压力低于250 kPa。
3.3 紧急制动
紧急制动采用“得电缓解”方式,由贯穿全列的紧急制动回路进行控制,此回路一旦断开,各车紧急电磁阀失电,所有车辆实施空气紧急制动。从制动风缸供给的空气越过EP转换阀,通过载荷调整阀进行压力调整后到达中继阀,施加紧急制动。同时,EBCU发送紧急制动信号到BCU,用来控制EP转换阀输出压力,以作为紧急电磁阀的备份。紧急制动不受冲动极限限制,触发条件如下:(1)两端司机室紧急制动按钮触发;(2)列车分离;(3)列车未激活。
由于紧急制动减速度较大,仅靠空气制动容易产生滑行,因此设置非黏着制动方式的磁轨制动。Tc车2位转向架设置磁轨制动器,通过磁极靴与轨道磁力产生的摩擦力使列车减速。紧急制动触发时,磁轨制动器与空气制动同时动作,以缩短紧急制动距离。
3.4 保持制动
列车停稳后,制动系统自动施加保持制动力,确保AW3载荷下在最大坡道上和风速100 km/h不利条件时,列车不发生溜滑。
3.4.1 保持制动施加逻辑
保持制动施加逻辑为以下3个条件取和:(1)EBCU判断车速<1 km/h;(2)EBCU接收到制动指令;(3)EBCU没有检测到保持制动强迫缓解硬线信号。
3.4.2 保持制动缓解逻辑
保持制动缓解逻辑为以下3个条件取或:(1)EBCU接收到牵引指令,且收到网络下发的保持制动缓解指令;(2)EBCU接收到牵引指令,BCU同时检测到车辆速度>5 km/h,但没有收到网络下发的保持制动缓解指令;(3)EBCU检测到保持制动强迫缓解硬线信号。
3.5 停放制动
采用弹簧储能式停放制动装置。停放制动功能由辅助控制单元和停放制动夹钳等实现。
停放制动缓解工况下,总风压力通过缩堵、双脉冲电磁阀、双向止回阀进入停放制动缸,缓解停放制动。停放制动施加工况下,停放制动缸内压缩空气通过双脉冲电磁阀排出。双向止回阀左侧连接空气制动输出的制动缸压力,右侧连接双脉冲电磁阀输出的停放制动压力,取二者中的较大值作为输出值,防止停放制动和空气制动同时施加而破坏基础制动或引起擦轮。
停放制动受司机室操纵台“停放制动施加”和“停放制动缓解”按钮控制,停放制动施加和缓解指令线贯穿全列,全列停放制动施加和缓解同步动作。通过指令线将停放制动施加/缓解信号传递给双脉冲电磁阀,从而控制停放制动缸的排/充风。在辅助控制单元内设有压力开关和压力传感器,用于监控停放制动的状态。运行过程中停放制动施加,进行封锁牵引。
3.6 乘客紧急制动
3.6.1 乘客紧急制动拉闸
在每个车门区域安装1套乘客紧急制动拉闸,主要包括手把、速动开关、复位弹簧、复位杆和接地装置等。手把操作力为(100±30) N,操作行程约15 mm。
乘客紧急制动拉闸具有自锁功能。操作手把后,手把位置将锁住,不得自动复位且无法手动复位,需采用四角钥匙进行复位操作,复位方向为顺时针。
3.6.2 乘客紧急制动控制逻辑
拉下客室内任一乘客紧急制动拉闸时,司机室蜂鸣器发出响声5 s,TCMS屏上显示紧急手柄触发区域,车体两侧(外部)黄色指示灯处于闪烁状态。同时,根据用户需求,不同工况实行不同的制动控制策略:(1)当车辆停在站台时,不自动施加制动;(2)当车辆离开站台但不超过100 m时,车辆立即施加最大常用制动;(3)当车辆离开站台且超过100 m时,车辆不自动施加制动,可继续行车;(4)当车辆离开站台且超过100 m且将“离站100 m旁路开关”转至旁路位,车辆立即施加最大常用制动。
3.7 磁轨制动
在Tc1和Tc2车各设置1套磁轨制动控制器和磁轨制动控制气路板,在Tc1和Tc2车2位转向架各设置1套磁轨制动器。
3.7.1 气路控制原理
磁轨制动气路控制原理见图7,磁轨制动动作示意图见图8。

M01.磁轨制动控制气路板;M01.31.活塞阀;M01.32.电磁阀;M01.33.减压阀;M01.35.压力传感器;M03.磁轨风缸;M05.过滤器;M06.单向阀;M07.截断塞门;M08.磁轨制动器。

图8 磁轨制动动作示意图
(1) 紧急制动施加时,磁轨制动同时被触发,磁轨制动电磁阀得电,总风经过减压阀、活塞阀后充入磁轨制动器汽缸,使磁铁下降到轨道上。同时,磁铁通电,建立磁道制动力。
(2) 紧急制动缓解时,磁轨制动电磁阀失电,磁轨制动器汽缸排气,汽缸的压缩弹簧将磁铁和履带杆拉回到其初始位置。
3.7.2 电气控制原理
图9为磁轨制动电气控制原理,在紧急制动电气回路中设置磁轨继电器,当车辆发生紧急制动时,磁轨继电器失电,其对应触点闭合,EBCU结合车辆速度发出磁轨制动请求指令给磁轨制动控制器(iRCB):车速为30 km/h以上,发送请求指令;车速为28 km/h以下,停止发送请求指令。iRCB得到磁轨制动请求指令后控制磁轨制动电磁阀得电,并给磁轨制动器供电,车辆施加磁轨制动。另外,iRCB发送磁轨制动施加信号给网络,在司机室显示屏进行显示。
在车辆制动出现滑行时,EBCU输出控制SKVR继电器得电,EBCU可通过SKVR触点发出指令控制磁轨制动动作,在直接提高车辆制动力的同时通过增大清洁轨道改善车辆黏着,获得间接的较大制动力。

图9 磁轨制动电气控制原理
3.8 超速控制
中央控制单元(CCU)向EBCU发送各车设定的实际轮径值和超速保护限速基准值(V1),EBCU通过速度传感器采集的脉冲频率、测速齿轮参数和各车实际轮径值等计算并向CCU发送本车各轴速度。
(1) 当车辆速度达到(V1+3) km/h时,CCU控制车辆报警并向TCU发送封锁牵引信号。
(2) 当由于前一项故障或车辆在下坡路段速度继续增加到(V1+5) km/h时,EBCU内部发出超速信号控制超速继电器得电,串联于紧急制动回路2的超速继电器触点断开,导致紧急制动回路2断开,紧急制动回路2上的紧急制动电磁阀失电,列车自动施加紧急制动降速,如图10所示。同时EBCU向CCU发送超速保护触发紧急信号,CCU向EBCU发出最大常用制动指令作为冗余。

图10 超速控制原理图
(3) 当车速低于V1km/h时,超速继电器失电,紧急制动回路2恢复,紧急制动可以缓解。同时EBCU停止向CCU发送超速保护触发紧急信号,CCU停止向EBCU发出冗余的最大常用制动指令,取消报警、封锁牵引及紧急制动,可以继续行车。
(4) 另外,由其他触发条件触发的紧急制动依次通过紧急继电器1和紧急继电器2使紧急电磁阀失电,只有车辆停止后(零速继电器得电)才可缓解。
3.9 撒砂控制
在Tc车的1轴和Mp车的1、4轴设置撒砂装置,每个砂箱的有效容积不低于30 L。撒砂装置可以通过手动和自动2种方式触发。
3.10 机车及同型号动车组救援
3.10.1 机车救援
图11为机车救援方案,压力传感器将动车组列车管的空气压力信号转化为电压信号,EBCU通过压力传感器读取列车管压力下降值,并施加相应制动级位的制动,实现动车组与机车同步制动或缓解。
救援前需确认动车组DC 110 V供电正常,救援方案分为双管连通和单管连通2种方案。

图11 机车救援方案
(1) 双管连通。救援前分别连通机车和动车组端部的总风管(MR)和列车管(BP),通过机车给动车组总风管供风。机车列车管定压为500 kPa,表1为机车列车管减压量与对应的动车组减速度。救援过程中,若动车组出现意外状况,可通过拍下操纵台上的紧急制动按钮同时触发机车和动车组的紧急制动。
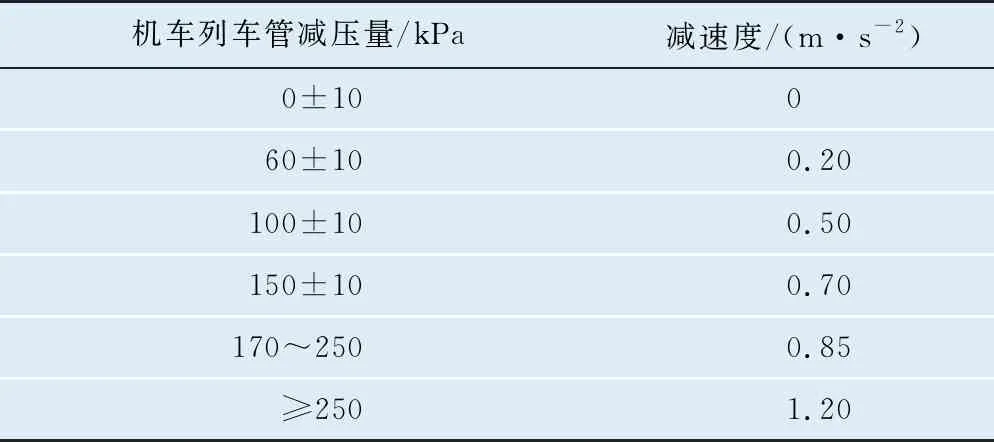
表1 机车列车管减压量与动车组减速度对应表
(2) 单管连通。救援前只连通机车和动车组的列车管,不连通总风管。通过动车组的列车管给总风管进行供风,救援时EBCU通过压力传感器读取列车管压力下降值,施加相应级位的制动。
3.10.2 同型号动车组救援
同型号动车组救援时,确认被救援动车组DC 110 V供电正常,救援动车组的制动指令通过指令线传递给被救援动车组,实现同步制动和缓解。
4 基础制动装置
每台转向架装有4套制动夹钳,其中1套为带停放制动夹钳,满足列车在最大坡道(16‰)安全停放的要求,制动夹钳如图12所示。制动盘采用铸钢盘。

图12 制动夹钳
5 制动计算
在定员载荷、干燥、平直道工况下,根据EN 14531-1:2015《铁路应用 停车、减速距离和停放制动的计算方法 第1部分:利用平均值计算动车组或单车的一般算法》对初速度为160 km/h时的制动能力进行计算。制动系统主要技术参数如表2所示,计算结果如表3所示,最大常用制动、快速制动和紧急制动的平均减速度符合顶层指标要求,黏着系数低于TSI湿轨要求。
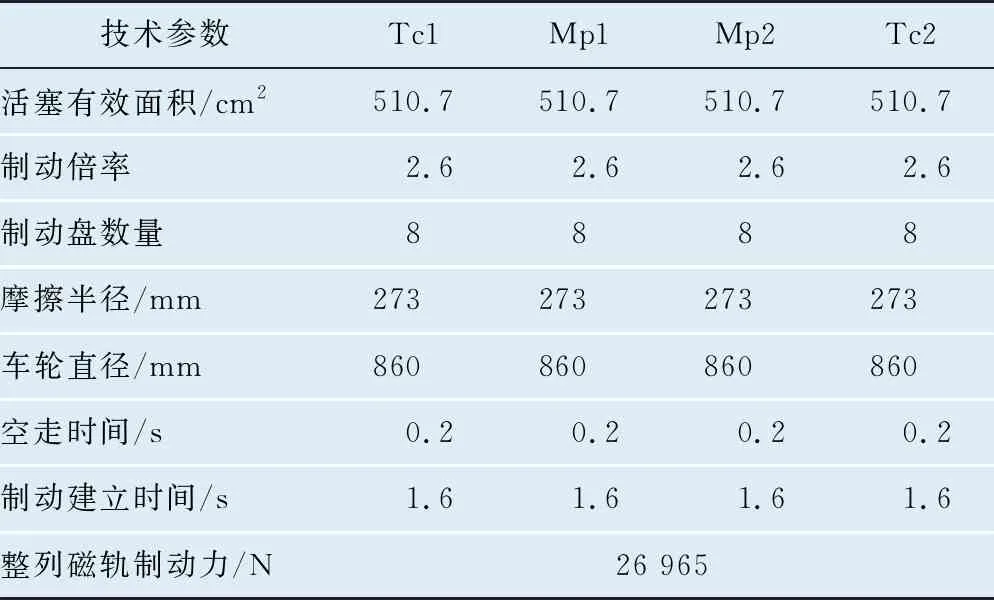
表2 制动系统主要技术参数

表3 制动计算结果
按照连续2次紧急制动进行热负荷曲线仿真,得到如图13所示的热负荷曲线图。从图13中可以看出,连续2次紧急制动后制动盘最高温度为380 ℃,低于铸钢制动盘的最高承温,热负荷符合要求。

图13 紧急制动热负荷曲线
6 结束语
首列动车组在国内和国外用户所在地完成了静态和动态型式试验,主要包括电空混合常用制动试验、纯空气常用制动试验、快速制动试验、紧急制动试验、滑行保护试验、停放制动试验等,试验结果表明各项制动性能参数完全满足要求。该制动系统技术平台的搭建完善了制动系产品平台谱系,为进一步拓展国际市场奠定了基础。
猜你喜欢
科技与创新(2022年15期)2022-08-04
军民两用技术与产品(2022年4期)2022-06-28
舰船科学技术(2022年10期)2022-06-17
汽车实用技术(2022年3期)2022-02-23
汽车实用技术(2021年22期)2021-12-11
党员干部之友(2021年9期)2021-09-18
柴油机设计与制造(2021年1期)2021-04-17
海峡姐妹(2020年2期)2020-03-03
伙伴(2020年1期)2020-02-14
汽车与驾驶维修(维修版)(2019年3期)2019-05-08