
基于声场模型的猎雷声呐探测成像仿真方法
2022-07-05 03:45:28蒋文聪张宏欣
数字海洋与水下攻防 2022年3期
蒋文聪,张宏欣
(中国人民解放军91439部队 43分队,辽宁 大连 116041)
0 引言
随着水雷引信智能化水平的不断提高,通过模拟目标物理场触发水雷引信的传统非接触扫雷方式已经难以胜任当前及未来面临的反水雷任务挑战[1-2]。以直接探测定位和灭除水雷的猎雷方式已经成为反水雷训练与作战的常态样式。可以预见,未来将有更多新的猎雷型反水雷装备出现。而这些反水雷装备的作战试验考核,尤其是探灭雷效能等核心能力指标的考核通常需要大量兵力和装备来配合保障,且需要多次试验以形成统计结论,其实施难度较大,成本较高。基于反水雷装备仿真系统试验可作为实航试验的有效补充,对于作战试验阶段评估反水雷装备效能具有重要意义。
猎雷声呐探测成像仿真是构建反水雷装备仿真系统的核心与难点所在。从信号生成到接收处理过程来看,猎雷声呐探测成像仿真需要依此考虑探测波形、声源空间指向性、水下声信号传播信道、海底底质与混响、目标表面散射、信号检测与处理以及成像处理,仿真过程需要大量建模与计算[3]。此外,由于高频成像声呐系统通常需要进行聚焦波束形成,其信号处理过程也较为复杂。因此,目前的声呐探测和成像仿真方法[4-6]多采用直接目标亮点仿真的方法进行,即忽略掉声呐成像前的所有物理和信号处理过程,在恒定声速条件下直接仿真目标亮点来得到图像,这种方式虽然能够极大简化处理过程,但不能反映水文、底质等条件对于探测识别结果的影响,因此不利于构建反水雷装备仿真系统。
本文基于水下声学中广泛采用的Bellhop3D三维声场分析程序[7-8]进行计算,结合简化声散射模型与信号复分析方法,以耦合方式定量考虑了声呐搭载平台与目标相对位置、姿态对于一定开角下的探测范围影响及速度对于信号的多普勒效应,较为完整地模拟出目标回波信号,并根据声呐探测成像原理进行等效信号处理实现了成像仿真。由于Bellhop3D能够在任意三维底质和任意空间声速梯度条件下进行声场分析计算,因此基于其构建的信道冲击响应能够更好的反映实际中的水下声传播环境。此外,采用简化声散射模型和等效信号处理提高了计算效率,从而使整个过程的仿真计算可以在较短时间内完成。以某型反水雷装备前视声呐为例,对声呐探测沉底水雷目标情况进行了仿真。结果表明,本文方法能够得到高频声呐对沉底水雷目标的探测图像,与实际情况具有一致性,可应用于反水雷装备模拟仿真系统中的声呐探测成像仿真。
1 前视声呐与运动学耦合声信号模型
1.1 前视声呐、波动方程与声信号
前视声呐位于搭载平台的艏部,是用于猎雷探测的主要装备。其换能器一般包括1个弧形发射声源和1个半圆型或直线型接收阵列,聚焦波束成形在接收时由接收阵列完成。图1中给出了本文中使用的前视声呐发射声源和接收波束的几何描述。其中:θS=90°,为发射源水平开角;ϕS=45°,为垂直开角;θB=0.468°,为接收成形波束水平开角;ϕB=θs,为接收波束垂直开角范围;Rmax= 1 50m ,为前视声呐最大探测距离。

图1 发射声源和接收波束的几何描述Fig.1 Geometric description of transmitting acoustic source and receiving beam


式(1)可以利用 Bellhop3D声场分析程序求解三维传播空间内的程函方程进行计算,从而得到从声源级处到某一散射点的单程传播信道参数,即反映传播时延的函数γ(x),复包络A( x)和相变φ( x )。对于前视声呐,可以将其视作收发合置的,因此利用单程传播参数可以容易地计算得到散射点在前视声呐接收处产生的回波,即根据式(2)可得到前视声呐接收声压场信号为

1.2 运动学耦合分析
探测平台运动学信息与声发射与接收信号之间的耦合主要包括:①探测平台姿态对于发射声源和接收波束与海底地形(目标)之间的姿态的影响;②运动导致相对于位置的变化;③平台运动产生的多普勒频移。下面分别对上述耦合因素进行定量分析。
1)相对姿态与相对位置的坐标转换。
设海底(或目标)地形坐标点为xT=(xT, yT,zT),前视声呐声源坐标为 xs=(xs, ys, zs),搭载平台姿态角为 ψ = ( ψ ,θ,ϕ)。以声源坐标为原点,则海底(或目标)地形相对于前视声呐坐标系的位置为

式中:R(ψ, θ, )ϕ为搭载平台相对于地形参考系的姿态矩阵。完成上述转换后即可利用xT′作为海底(或目标)地形坐标点,导入Bellhop3D声场分析程序进行信道计算。
2)多普勒频移。
如图2中给出的一般态势所示,发射/接收信号的多普勒频移主要是由于探测平台与探测目标之间的相对运动引起的。图2中:u0为发射声源指向某运动目标的单位矢量; vrsource,vrobs分别为声源和观测点沿着相对方位的径向速度幅值;vsource,vobs为发射声源和观测点的运动速度; θsource,θobs分别为径向矢量与源运动速度和观测点运动速度之间的夹角;vrtarget,vtarget分别为目标的径向速度幅值和运动速度。

图2 发射声源与观测点/目标的相对态势Fig.2 Relative situation between acoustic source and target
根据图中给出的关系,结合多普勒频移原理,注意到声速相对于声源运动是无关的,可以容易地得到如下关系:
显然可见,上式的频移本质上相当于在时域对信号进行压缩操作。因此,本文在实际处理中,对于时域信号的频移依此通过 Chirp-Z变换、逆Fourier变换和 Hilbert变换完成,其中Chirp-Z变换和逆 Fourier变换用于频移后的离散时域信号,Hilbert变换用于求取解析信号,以便于和Bellhop3D的衰减计算结果相匹配。
2 目标散射场的简化模型
探测声波入射目标时会发生散射,散射声场一般可采用Kirchhoff模型来表示,即
式中:A和dA分别表示目标表面与微分面元;R( x)为接收点处目标面元的反射系数;n(x)接收点处目标面元的法向矢量。
对于收发合置声呐声源和接收阵可设为同一位置,以前视声呐声源所处位置点为原点。将目标表面剖分成面元,上述积分可以表示为如下的求和:

文献[6]中已表明,基于面元积分近似的散射场 Kirchhoff模型可以得到与实际符合较好的近似结果,但对于高频声呐而言这通常需要大量的面元,对于本文的研究对象是难以适用的。假设目标表面相对于波束宽度是粗糙的,那么式(5)中的指数项可以忽略,面元剖分面积可以增大,因此散射强度场可以用简单的亮点模型进行非相干近似,即

式中:K( r)为归一化和单位转换量;χk( r)为第k个亮点面积块的特征函数,即当球壳|r|与该面积相交时为1,否则为0。式(6)的简化处理意为在距离一定条件下,接收亮度取决于入射波束与入射面积块的相对方向,与观测方向无关。
3 探测成像的等效处理
对于探测成像过程中的聚焦波束成形特性,本文利用 Bellhop3D三维声场分析程序中的 N×2D子程序,根据水平开角波束宽度,跟踪每个方位角采样面内的所有单程声线信道传播参数,即传播时延函数 γi( x),复包络 Ai( x)和相变 φi(x ),则根据式(3)可以得到第i个方位角采样面内的接收回波信号为
显然,由于声压 pi( x, t)仅在第i个方位角采样面内存在,因此这个声压强度即可以等效为聚焦波束成形后的结果。因此 pi( x, t)包含了由(x, t)确定的距离、第i个采样方位以及在该方位和距离上的强度,可以容易地给出在一定探测方位和距离上的回波强度,从而得到探测目标成像结果。
4 仿真算例
如图3中所示,本节采用美国马萨诸塞州海湾流域的 Weymouth海湾的真实海底地型和底质特性数据,结合在该海域实测的声速剖面数据共同构成探测成像仿真所在的水下环境,导入Bellhop3D声场分析程序进行三维声线信道响应参数的计算。仿真中取搭载于水下潜航器的前视声呐所在位置作为Bellhop3D声场分析程序中声线跟踪计算的参考系原点。
图4给出了在图3给出环境条件数据下,采用Bellhop3D声场分析程序高斯声束方法计算得到的发射阵声线轨迹;图5给出了声源处在[0,0,8] m时,10 m深度平面内的接收传播衰减(TL)。从图4-5中可见,该水域的高频声场传播具有显著的复杂性,这是由于浅(窄)水域尺度和复杂起伏的地形环境共同导致的。
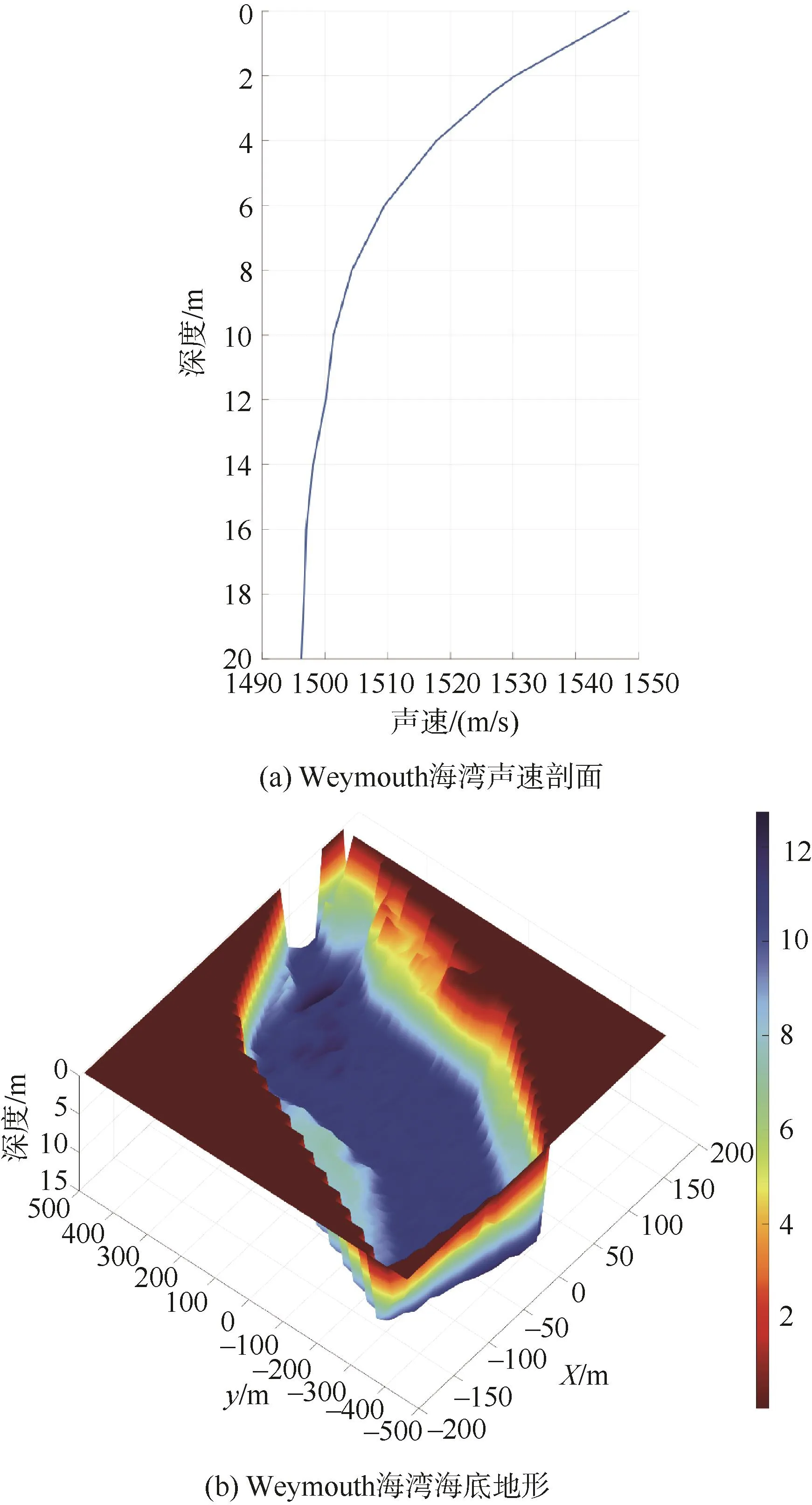
图3 Weymouth海湾海底特性数据Fig.3 Seabed characteristic data of Weymouth Bay
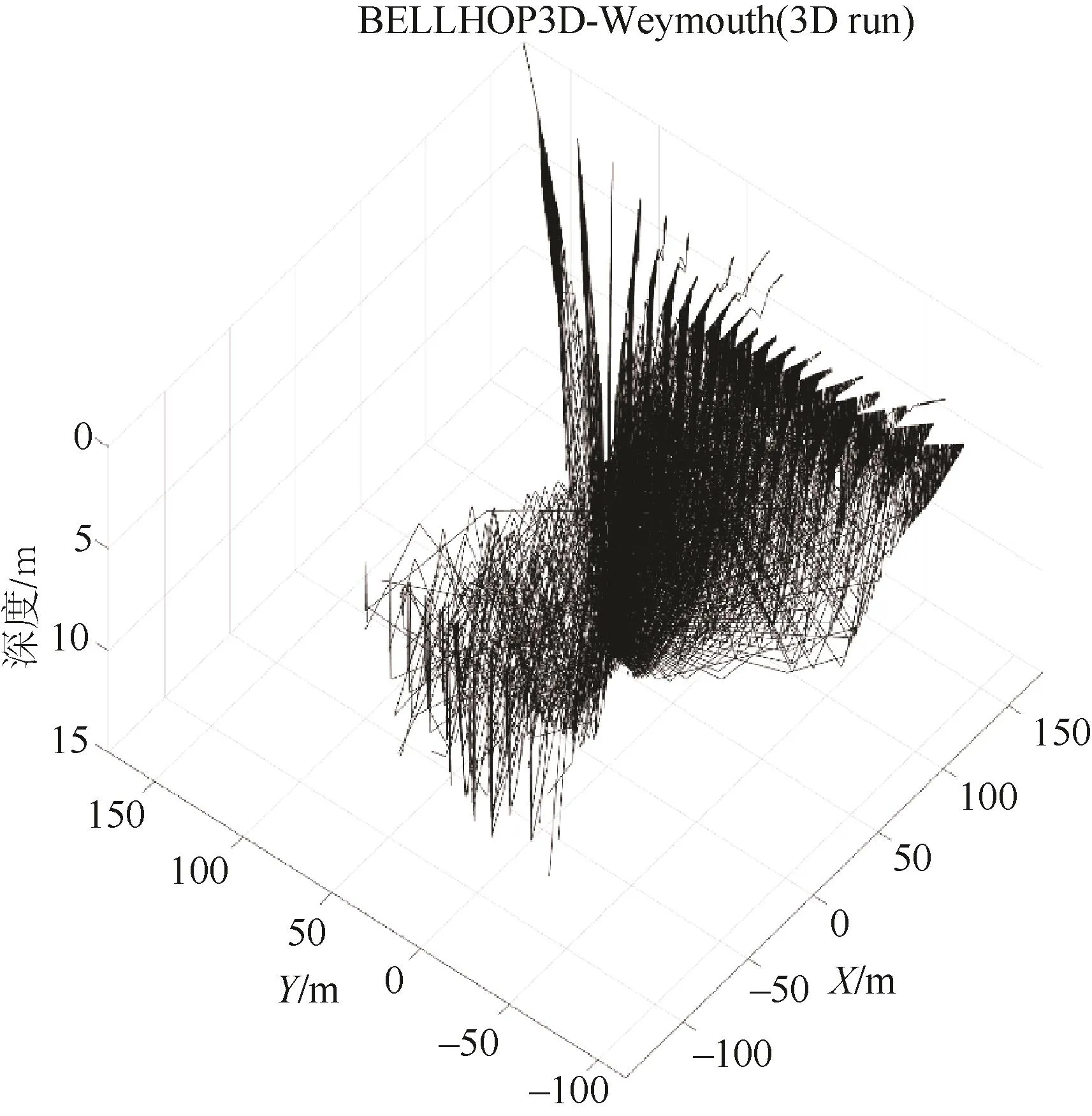
图4 前视声呐发射跟踪声线Fig.4 Forward-looking sonar emits tracking sound ray

图5 前视声呐发射波在10 m深度面内的传播衰减Fig.5 Propagation attenuation of FLS waves in a 10 m depth plane
为了通过式(11)来仿真被探测目标的散射声场强度,采用有限元软件对一个模拟沉底水雷目标进行几何建模。图6给出了该模拟目标表面的三角形任意剖分网格情况以及每个剖分面上的法向矢量。式(11)中的反射系数取水雷壳体材料的声反射系数。此外,为了模拟真实沉底水雷状态,在仿真处理时沉底水雷的下半部分没入海底地形障碍之中。

图6 模拟目标水雷及其法向矢量Fig.6 Simulated target mine and its normal vector
图7-8分别给出了在无目标条件下和目标位于前视声呐正衡25 m处条件下,采用本文方法得到的前视声呐探测图像,其中根据某型前视声呐的波束成形特性设置了正横方向附近正负15°的接收增益,此外为了便于观察目标情况和减小计算量,只取了图 3(b)中的一部分地形数据。从图中可见,本文方法能够较好的仿真出前视声呐对海底和目标的探测成像结果,验证了本文方法在直观上的正确性和有效性。
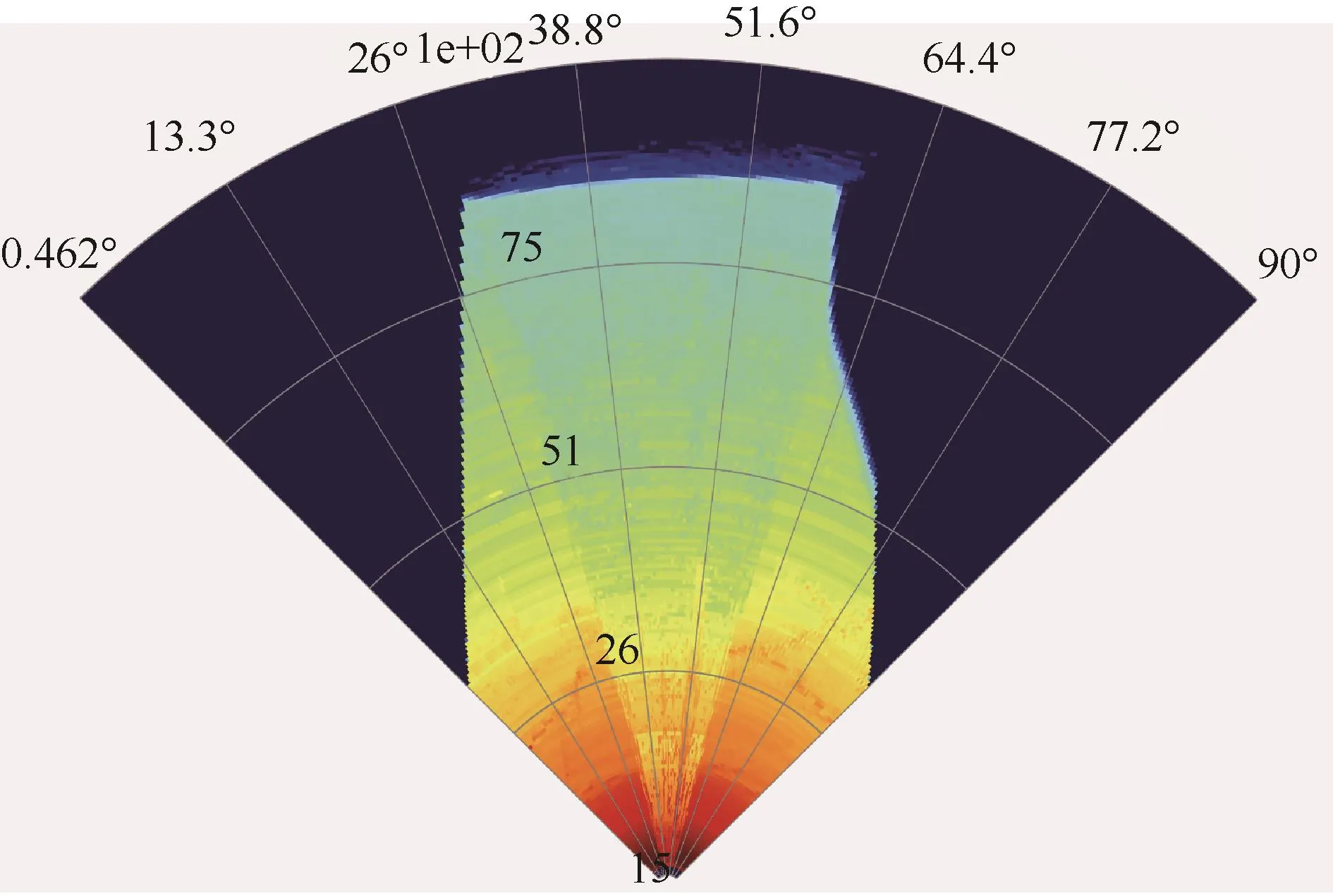
图7 无目标条件下前视声呐仿真探测成像结果Fig.7 Imaging results of FLS simulation under no-target condition
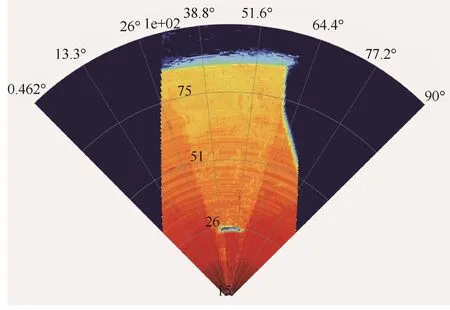
图8 目标位前视声呐正衡25 m处的仿真探测成像结果Fig.8 Imaging results of simulated detection at 25 m from the FLS abeam of the target
5 结束语
本文针对猎雷声呐对水雷目标探测仿真问题,提出一种基于运动学信息与水下声场传播耦合分析的探测成像仿真方法。利用 Bellhop3D声场分析程序计算水下声信道信号冲击响应,结合简化声散射模型与信号复分析方法,以耦合方式定量考虑声呐平台运动学因素的影响,模拟目标回波信号,并根据声呐探测成像原理进行了等效的聚焦波束形成处理。以高频前视声呐为例,对声呐探测沉底水雷目标情况进行了仿真,给出了高频声呐对沉底水雷目标的探测图像,与实际声呐探测情况具有一致性。为反水雷作战试验仿真系统与部队反水雷训练系统中的声呐探测成像仿真提供了方法依据。下一步主要工作是进一步提高成像计算效率,结合平台运动实现动态实时成像,建立搭载平台操控和探测成像一体化猎雷声呐探测仿真系统。
猜你喜欢
中国商人(2022年9期)2022-09-02 08:30:42
山东第一医科大学(山东省医学科学院)学报(2021年7期)2021-10-13 06:40:50
中华养生保健(2020年9期)2021-01-18 03:12:30
数字海洋与水下攻防(2020年5期)2021-01-04 01:40:16
数字海洋与水下攻防(2020年5期)2021-01-04 01:39:54
中学历史教学(2016年4期)2016-11-11 07:11:33
中国卫生标准管理(2015年17期)2016-01-20 09:26:45
中国卫生标准管理(2015年25期)2016-01-14 09:29:23
音乐探索(2015年1期)2015-04-27 01:01:52
时代金融(2012年9期)2012-04-29 03:09:26
