
高压气动隔离开关操作机构设计
2022-07-04 11:53李治军钟积科
船电技术 2022年6期
沈 文,李治军,钟积科
高压气动隔离开关操作机构设计
沈 文,李治军,钟积科
(武汉船用电力推进装置研究所,武汉 430064)
操作机构是隔离开关传动执行的重要部件,其可靠性直接影响隔离开关的正常合闸与分闸。本文提出了一种高压气动隔离开关,对其气动操作机构进行了设计,提出了几种气动回路方案,对方案的优劣进行了比较分析与优化,可为类似结构隔离开关操作机构的设计提供一定的参考。
高压 隔离开关 气动回路 电磁阀
0 引言
隔离开关是高压开关电器中使用最多的一种电器,其主要作用是在需要检修的部分和其它带电部分之间形成足够大且明显可见的断口以保证检修工作时的安全[1]。近年来,国内厂家不断借鉴国外隔离开关产品的生产经验,缩短了与国际产品的差距,部分超高压隔离开关设备产品国产数量已经超过进口,但与国际先进水平的产品差距仍然较大[2]。随着电器试验室和电站对隔离开关耐受短路电流能力要求不断提高,国内高压隔离开关设备在技术参数、质量性能方面仍有较大改进的空间[3]。因此,新型气动隔离开关的应用研究具有十分重要的意义。
本文所研究的高压气动隔离开关简化模型如图1所示,主要由触头组件、操作机构和底座组成。其中触头部分主要由动触头板、静触头座和触指等组成;底座部分主要由框架支座和绝缘子等组成;操作机构部分主要由气缸、连杆、转轴、轴套等组成。操作机构采用气动操作机构,可实现远程操控隔开开关动作;气缸与动触头板采用曲轴连接来实现合分闸操作。操作机构最大的要求就是保证隔离开关准确动作,为确保设备安全和人身安全,设计的操作机构应能准确定位,在开关动作到位时准确反馈运行状态[4]。
本文对该隔离开关气动操作机构的开距、转角以及传动杆系在结构上进行了设计分析,并在两种不同气动回路方案的优劣进行对比分析后,对气动回路方案进行了优化,使隔离开关运行更加可靠。
1 操作机构设计
1.1 开距转角计算
对本隔离开关操作机构的主要要求为开距,如下图2所示,开距为,若及尺寸已知,则可得出开距与转角的关系式为:

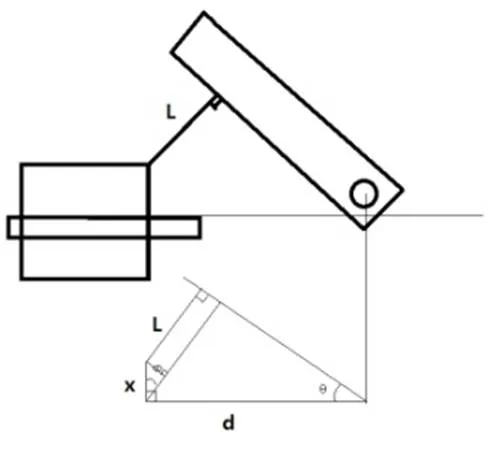
图2 开距示意图
测量本隔离开关参考样机可得=460 mm,=60 mm(约为250 mm),转角及对应的开距由公式(1)计算结果见下表1。
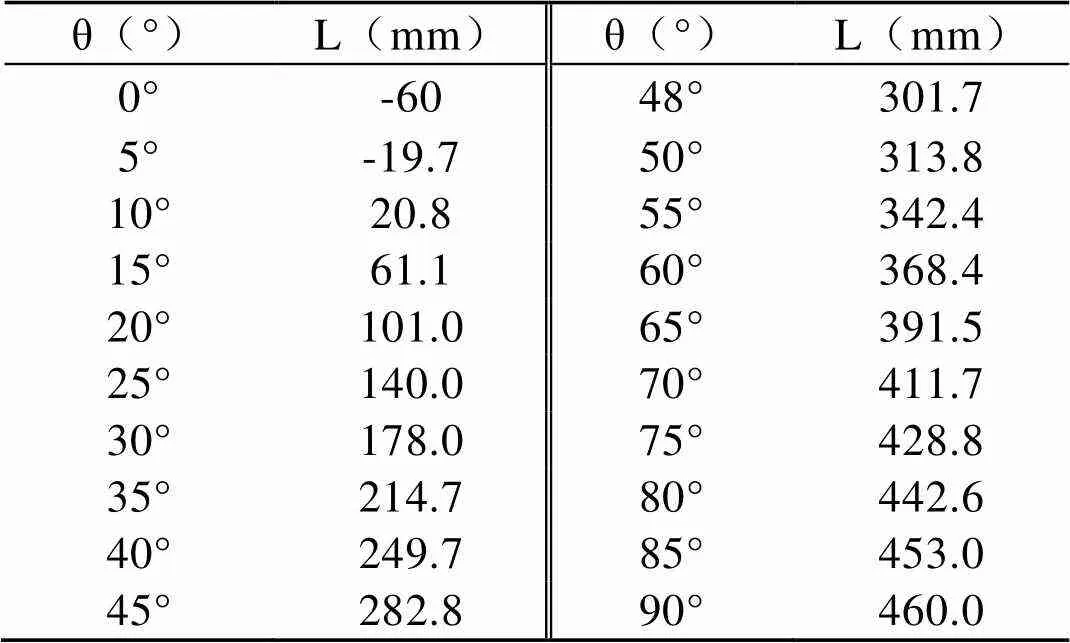
表1 转动角度对应的开距
由表1可知,开距为250 mm时,则动触刀转动角度应该为40°,若增大开距到300 mm,转动角度为48°。以下按照初始开距为250 mm,转角为40° 计算。
1.2 传动杆长度确定
如图1所示,将三个传动杆分别标为杆1、杆2、杆3,其中杆1与气缸组成杆系A、杆2和杆3组成杆系B。
根据开距反推其他杆的长度。杆系B中,已知杆2最终转角超过竖直后10°,动触刀初始状态处于水平,动触刀转动40°,另动触刀支点到中转点距离为225 mm。若设置杆2长度为150 mm,通过计算可知,杆2转角为94.35°,杆3长度为632.28 mm。由于转角过大,需对杆2长度进行略微调整,取杆2长度为200 mm,杆3为580 mm,得到杆2转角为80.92°,动触刀转角为43.18°,由公式(1)可得开距为276.4 mm,符合要求。
对于杆系A,目标值为在气缸的推动下,气缸由初始位置达到最终位置时,杆1转动角度应与杆2转动角度相同,为 80.92°。已知气缸压缩时,气缸长度为660 mm,气缸伸长时长度为960 mm,气缸初始状态安装角为15°以保证正常工作。经过计算得到杆1长度为234.76 mm,对杆1长度进行圆整,取240 mm,得到气缸初始安装角为16.6°。
至此,传动杆数据已经分析完成,所确定尺寸如下表2所示:

表2 操作机构尺寸
2 气动回路方案
2.1 气动回路方案一
气动回路方案一如图3所示,主要由气缸、单向节流阀、三位五通电磁阀及气源组成。该气动回路方案可分为三个正常状态及不同故障模式,分别如下:
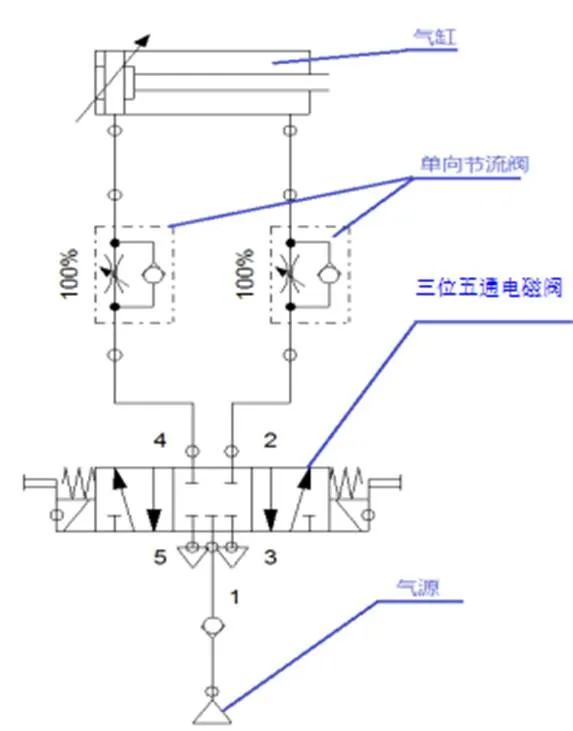
图3 气动方案一
保持态:气源提供压缩气体,经过单向阀进入三位五通电磁阀,该电磁阀为双电控式,若电磁阀两边未通电,即处于图1所示的保持态,压缩气体不能通过电磁阀,气缸内部气体也不能排除,此时处于保持态,动触刀长期闭合或者分开状态时,电磁阀应处于此状态。此时,电磁阀断电也不会造成事故。
分闸:若电磁阀左端通电(分闸过程中保持通电),此时隔离开关由保持态转换为分闸状态,分闸状态气动回路动触刀速度可通过可调单向节流阀调节。合闸完毕后,通过接近传感器感知并反馈给电磁阀,电磁阀右端断电,分闸完毕,电磁阀由分闸状态恢复到保持态,动触刀处于并保持于分开状态。
合闸:动触刀处于分开状态,且电磁阀处于保持态,若需要进行合闸,则对电磁阀右端进行通电(分闸过程中保持通电),气动回路进入合闸状态,气缸到位后接近开关感知并给电磁阀断电,电磁阀恢复到保持态,动触刀处于并保持于闭合状态。
断电断气故障:断电断气时,不管出于何种状态,电磁阀会恢复到保持态,气路气体阻塞,气缸及动触刀无任何动作,符合前面断气保持原位要求。
断电不断气故障:断电不断气时,不管出于何种状态,电磁阀会恢复到保持态,气路气体阻塞,气缸及动触刀无任何动作,符合前文所述断气保持原位要求。
断气不断电故障:当处于保持态时,气泵断气,由于气路气体阻塞,气缸及动触刀无任何动作,符合前面断气保持原位要求。
当隔离开关进行分闸时,电磁阀不断电、气泵断气,电磁阀仍处于打开状态,由于设置单向阀,气缸仍不动作,符合断气保持原位,故系统安全。
当隔离开关进行合闸时,电磁阀不断电、气泵断气,电磁阀仍处于打开状态。
2.2 气动回路方案二
方案二与方案一的区别在于电磁阀不同。如图4所示,方案二采用双电控两位五通电磁阀,该阀工作原理在于有两个位置,无保持状态。
分闸状态:电磁阀左端给电(瞬时通电即可,无复位弹簧,断电后保持通电前原位),左端导通,气缸动作,开始分闸,分闸到位后,所有部件保持原态。
合闸状态:电磁阀右端给电(瞬时通电即可,无复位弹簧,断电后保持通电前原位),右端导通,气缸动作,开始合闸,合闸到位后,所有部件保持原态。
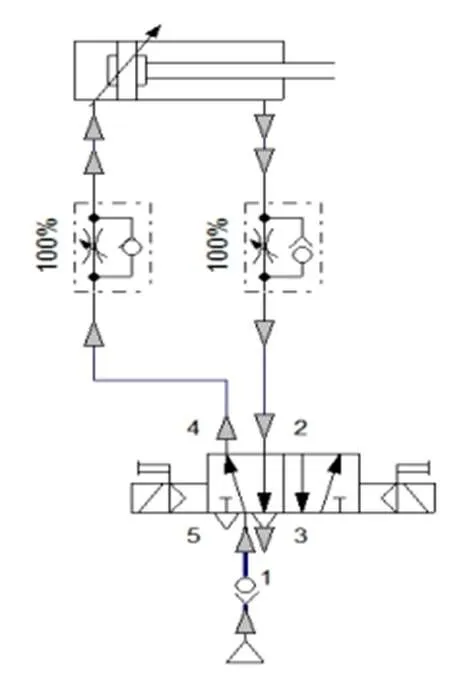
图4 气动方案二
断电故障:由于电磁阀是瞬时通电,断电对电磁阀动作不影响。
断气故障:当左端接通时,断电断气,电磁阀保持左端接通,由于有单向阀,气缸及动触刀无任何动作,符合前面断气保持原位要求;
当右端接通时,断电断气,电磁阀保持右端接通。
2.3 两种气动回路方案对比分析
两种气动回路方案的差异是由电磁阀带来的,因此各自气动回路具有各自的特点。
1)方案一
优点:电磁阀是三位,在长期闭合或分开时有自锁功能。
缺点:电磁阀在运行时需一直保持通电
2)方案二
优点:二位电磁阀结构简单,瞬时通电。
缺点:不管在何种状态,气路一直处于接通状态,供气设备一直处于供气中,对寿命有影响。
2.4 气动回路方案改进
结合前两个方案的优点,对气动回路进行了优化,设计了一种方案三(图5所示),能够很好的实现所要求的各种断电断气故障的保护措施。
分闸:若电磁阀左端通电(分闸过程中瞬时脉冲即可),此时隔离开关转换为分闸状态,分闸状态气动回路两位两通气动阀在气源有一定压力时处于接通状态,动触刀速度可通过可调节流阀调节。
合闸:若电磁阀右端通电(合闸过程中瞬时脉冲即可),此时隔离开关转换为合闸状态,合闸状态气动回路两位两通气动阀在气源有一定压力时处于接通状态,动触刀速度可通过可调节流阀调节。
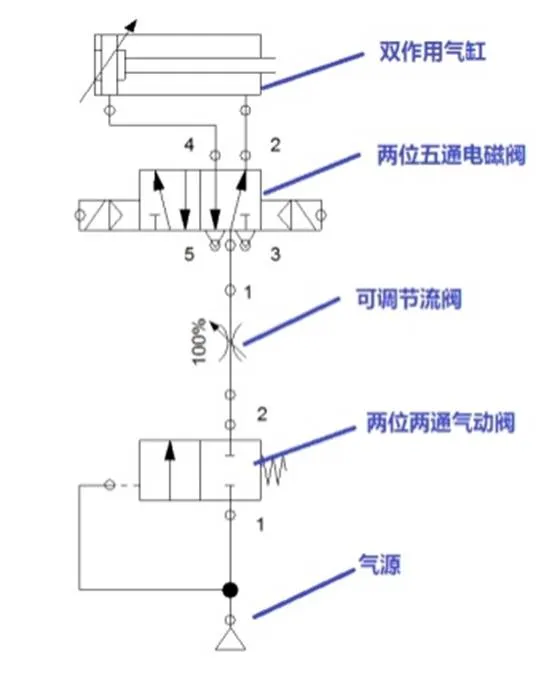
图5 气动回路方案三
断电故障:由于电磁阀是瞬时通电,断电对电磁阀动作不影响,系统安全。
断气故障:当气源断气时,两位两通气动阀会自动关闭,气缸内气体量不变,气缸不动作(无负荷或小负荷时),系统安全。
3 总结
本文提出一种高压气动隔离开关,对其结构组成作了简单介绍,并对其操作机构及气动回路进行了设计分析。
操作机构采用气动操作,可实现远程操控,气缸与动触板采用曲轴连接,在短路电流发生时能确保触头静触板和动触板的接触处于最佳状态,提高开关的动热稳定水平;连杆机构分闸位采用过死点方案,对比机构分闸不过过死点方案,使气缸断气时,不会因为自重而导致错合闸,结构更加可靠。
[1] 邵淑敏, 张英杰, 贾华景, 等. 12 kV 环保充气柜用三工位隔离开关操作机构的研发[J]. 高压电器, 2019, 55(9): 236-240.
[2] 齐炳利, 孟忠, 王宇弛, 等. 800 kV高压交流隔离开关研究开发[J]. 高压电器, 2012, 48(4): 46-53.
[3] 钟振蛟. 国产高压交流隔离开关的发展和向特高压的跨越[J]. 高压电器, 2007, 43(4): 265-268.
[4] 张艳晓, 张杰, 赵成, 等. 双凸轮组合定位的三工位隔离开关电动操作机构研究[J]. 高压电器, 2018, 54(4): 211-215.
Design of the operating mechanism for the high-voltage pneumatic isolating switch
Shen Wen, Li Zhijun, Zhong Jike
(Wuhan Institute of Marine Electric Propulsion, Wuhan 430064, China)
TM564.1
A
1003-4862(2022)06-0049-04
2021-09-30
沈文(1989-),男,工程师。研究方向:直流断路器。E-mail:549601989@qq.com
猜你喜欢
科技与创新(2022年11期)2022-06-14
电子制作(2021年4期)2021-06-16
恋爱婚姻家庭·养生版(2020年10期)2020-11-19
内燃机与配件(2020年5期)2020-09-10
科学与财富(2019年32期)2019-10-21
科技视界(2019年21期)2019-09-25
意林·少年版(2018年2期)2018-02-07
环球时报(2018-02-02)2018-02-02
世纪之星·交流版(2016年1期)2016-04-20
少年科学(2015年9期)2015-10-14
