
永磁同步电机无速度传感器控制系统设计及参数影响分析
2022-07-04 11:53:58邹应勤韦忠朝
船电技术 2022年6期
邹应勤,彭 溪,朱 磊,韦忠朝
永磁同步电机无速度传感器控制系统设计及参数影响分析
邹应勤1,彭 溪1,朱 磊1,韦忠朝2
(1. 武汉船用电力推进装置研究所,武汉 430064;2. 华中科技大学,武汉 430074)
永磁同步电机无速度传感器控制以其高可靠性、低成本逐步在风机、水泵等领域广泛应用。为了进一步探究其稳定机理,扩大其应用范围,提高无感系统的动态响应速度和低速稳定性,本文以表贴式永磁同步电机为研究对象,建立了统一的电机数学模型,采用模型参考自适应方法设计转速观测器。并对参数误差造成的影响进行了分析,提出了基于扩张状态的补偿方式。仿真和实验验证了所设计系统高效可行,减小了对参数的依赖。
模型参考自适应 扩张状态观测器 永磁同步电机 电流观测器 无速度传感器控制
0 引言
永磁同步电机无传感器技术主要分为两大类,一类是基于电机的基波模型,另一类是利用电机的凸极性[1]。
电机在中高速时,基波模型能够获得很好的观测效果,不需要额外的谐波注入,只需要在算法上做小的修改。在低速时,由于种种原因,基波模型观测出来的转子转速位置效果差,在零速时甚至无法观测。观测结果依赖于电机参数,如果参数误差较大,观测得到的结果就会有较大偏差。
基于电机凸极性的算法不存在这些问题,不依赖于参数,即使零速下,只要电机具有凸极效应,都能准确观测转子位置。但是由于需要注入高频谐波,在高速时会降低母线电压利用率,在解调时用到滤波器,会带来延时。高频注入导致的低转矩波动,会产生噪声[2]。
本文采用的无感算法基于电机基波模型进行设计。一方面通过提高观测系统带宽,提高其在低速时的观测精度。另一方面,通过误差参数补偿,减小参数扰动带来的观测误差。
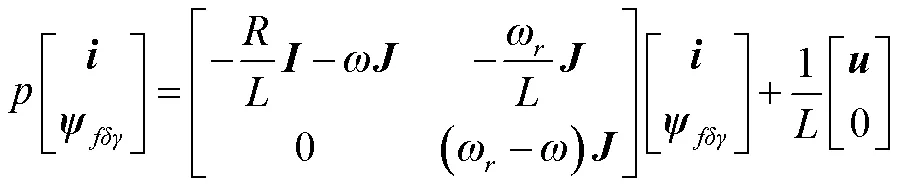
1 任意旋转坐标系下的电机模型
在三相静止坐标系中,只考虑基波,忽略磁路饱和、铁芯损耗,永磁同步电机的三相电压方程为

其中

采用PARK变换矩阵,将定转子矢量投影到转子参考系,可以得到常用的dq轴数学模型[3]。

其中,
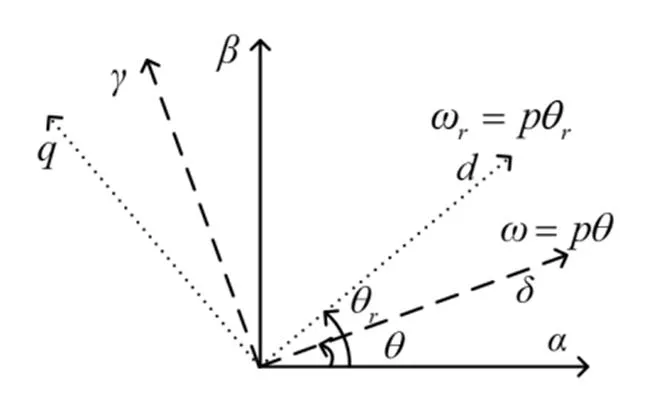
图1 参照系图
2 无感控制系统框图及反馈设计
无感控制系统的结构如图2所示:
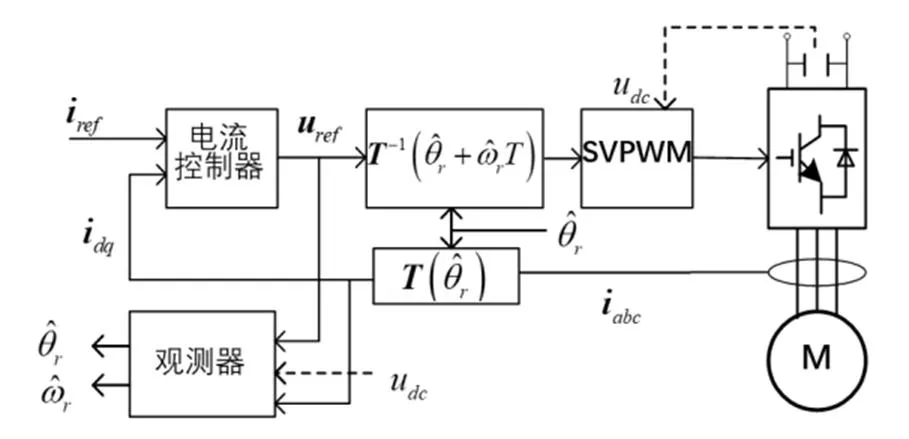
图2 无感控制系统框图
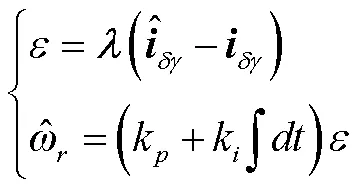
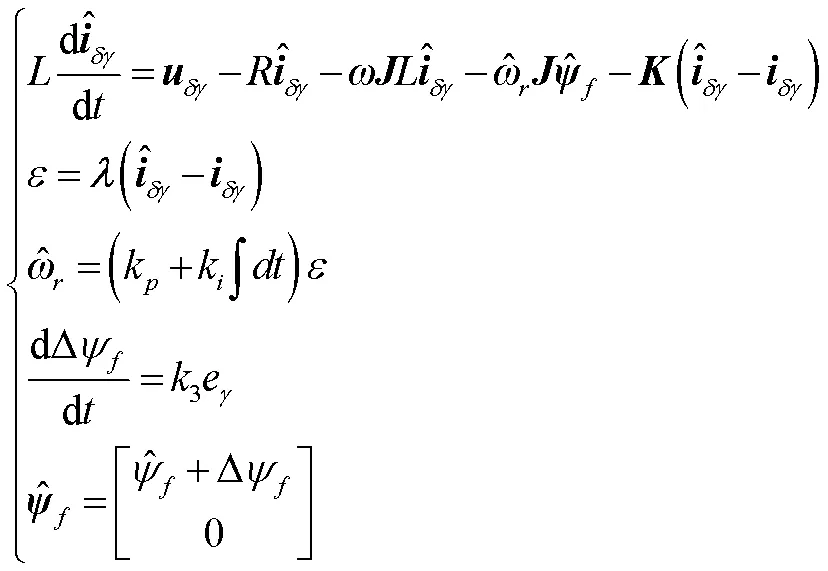
由于实际转子位置并不知道,建立如下的状态观测器:

假设电机建模参数、输入电压、检测电流均准确的情况下,观测量的误差主要由位置和速度造成。使用如下所示的趋近律:
利用观测器模型减去任意位置坐标系下建立的电机模型,得到误差方程,并对其进行线性化[5]:

基于式(8)选取误差反馈矩阵:
得到的转速观测的输入输出函数如图3。其中

图3 估计转速输出结构
3 参数误差影响分析
实际电机是一个复杂多变量非线性强耦合系统。其电感参数与电流大小相关,电流过大时电感会有饱和现象。永磁电机的永磁体对温度敏感,在磁场饱和时其磁场也会降低,而且随着使用时间增加,其磁场会有所减弱。即使不考虑这些,同一批电机的磁体磁场强度也不可能做的都一样大小,会有微小差别,在对可靠性要求高的场合,需要逐台调试,耗费工作量。电机电阻会随温度变化而变化,这意味着电机起动和运行一段时间发热后,电机参数就会不同[7]。
无感控制系统有一定的鲁棒性,能够抵御一定范围内的变化,下面定量分析上述参数扰动对观测结果的影响。

可以得到存在参数偏差的误差方程:


可见转子磁链存在偏差时,转速能够实现跟踪,但是观测得到的转子位置与实际存在偏差,会导致电机功率因数降低,效率降低,最大转矩减小。为此,将磁链扩张成一个待观测的状态变量,建立如式14的状态观测器[6]。

4 仿真验证
仿真采用MATLAB/SIMULINK完成,搭建离散仿真模型,PWM的开关频率是10 kHz。电机所带负载为风机类负载,负载转矩与转速的平方成正比。
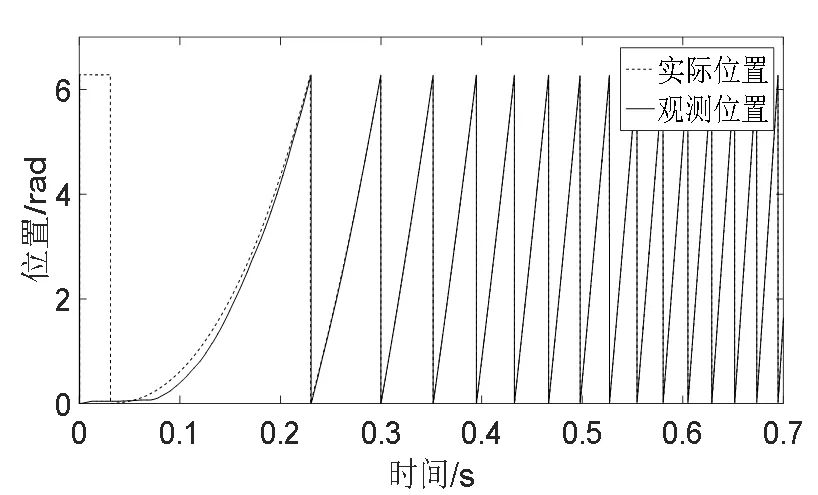
图4 观测位置与实际位置
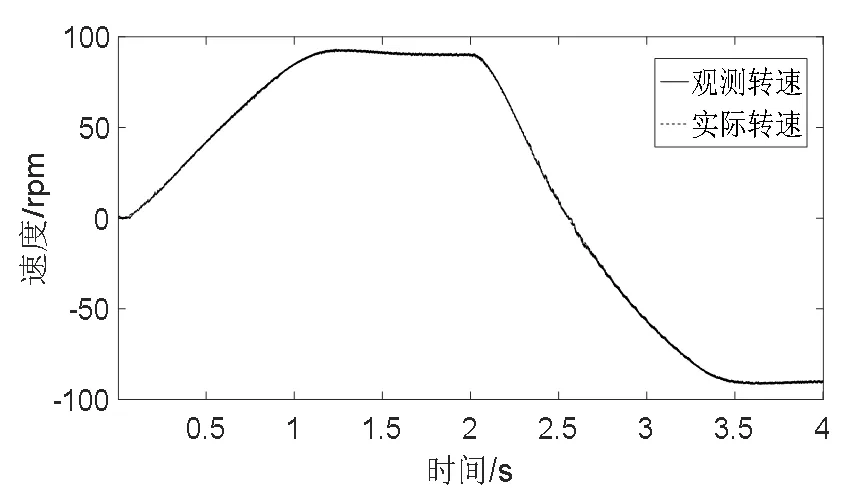
图5 观测转速与实际转速
得到的观测结果如图4~6。在2.5 s左右电机反转,电机正常运行,实现了带载过零点。正反转情况下所设计反馈均能实现较好的速度和位置观测,供转速电流控制器使用。
为了验证关于参数误差分析的结果,将观测器中建模所使用的磁链改变25%,由式(13)分析结果可以得到位置误差是17°。仿真得到的位置如图7所示,位置误差角是14.3°,与分析基本吻合。在用扩张状态观测器做了校正后,观测的转子位置如图8所示。由永磁磁链误差造成的位置观测偏差基本消除,但是在转向切换时的位置偏差相对增加了。图9是设置永磁磁链偏差为0.1时,观测器测得的永磁磁链补偿值,整体上比较平稳。
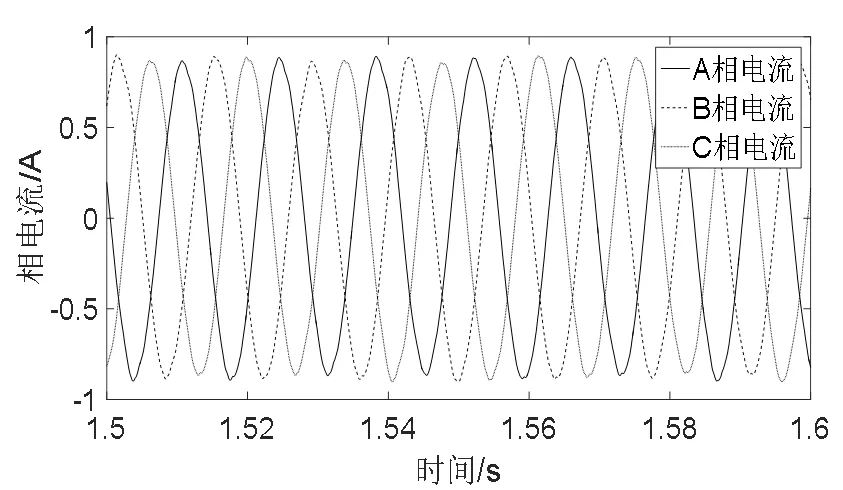
图6 电流响应
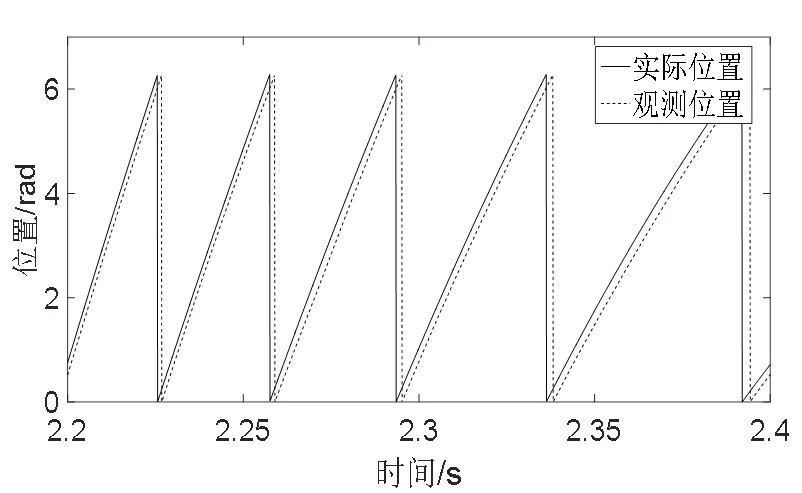
图7 磁链存在误差时的观测位置
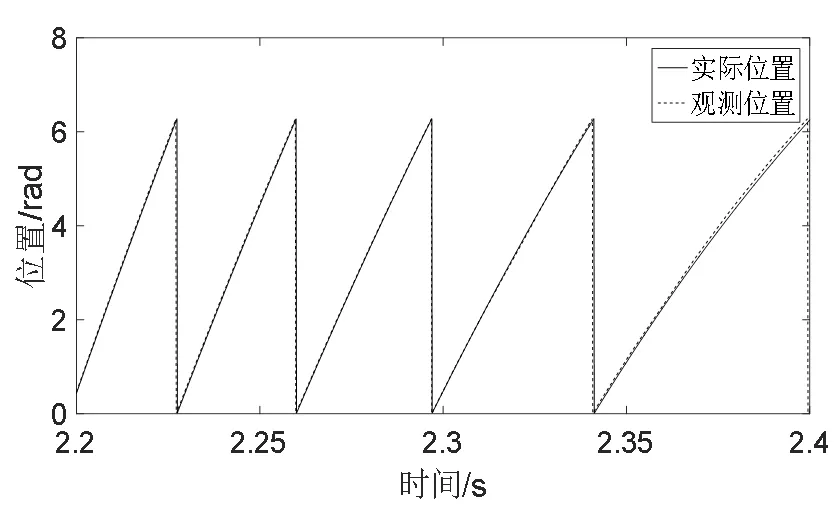
图8 校正磁链误差后的观测位置
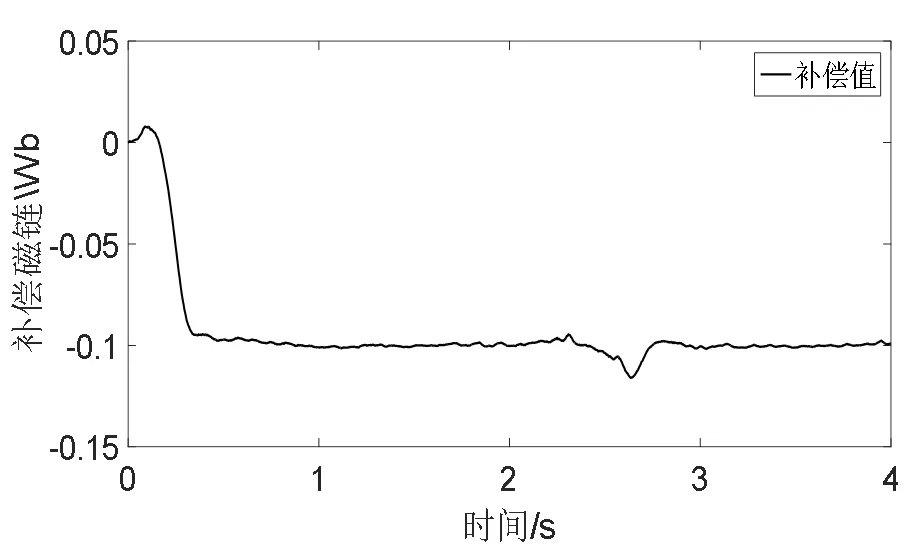
图9 磁链校正值
5 结论分析
本文在统一模型的基础上,设计了反馈系数。采用综合dq轴电流误差反馈作为转速锁相环的输入,从线性方程证明了其稳定性。针对参数误差对位置观测带来的影响,作了定量分析,并利用扩张状态观测器作了补偿,成功减小了转子位置观测偏差,提高了系统的稳定性。
通过仿真,验证了所设计无感系统的有效性和可靠性。
[1] 王子辉. 永磁同步电机全速度范围无位置传感器控制策略研究[D]. 浙江: 浙江大学, 2012.
[2] 刘小斌. 永磁同步电机无传感器转子磁极位置检测及其控制技术[M]. 江苏: 江苏大学出版社, 2017.
[3] 辜承林. 机电动力系统分析[M]. 武汉: 华中理工大学出版社, 1998.
[4] Suwankawin S, Sangwongwanich S. Design strategy of an adaptive full-order observer for speed-sensorless induction-motor Drives-tracking performance and stabilization[J]. IEEE Transactions on Industrial Electronics, 2006, 53(1): 96-119.
[5] 李殿璞. 非线性控制系统[M]. 西安: 西北工业大学出版社, 2009.
[6] 韩京清. 自抗扰控制技术:估计补偿不确定因素的控制技术[M]. 北京: 国防工业出版社, 2008.
[7] 金东. 基于爬山法的永磁同步电机参数辨识及控制系统的模型设计实现[D]. 武汉: 华中科技大学, 2019.
Design and parameter influence analysis of speed sensorless control system for PMSM
Zou Yingqin1, Peng Xi1, Zhu Lei1, Wei Zhongchao2
(1. Wuhan Institute of Marine Electric Propulsion, Wuhan 430064, China; 2. Huazhong University of Science and Technology, Wuhan 430074, China)
TM351
A
1003-4862(2022)06-0062-04
2021-12-23
邹应勤(1994-),男,助理工程师。研究方向:电机及其控制。Email: 1510315121@qq.com
猜你喜欢
加油站服务指南(2021年7期)2021-10-14 07:28:36
防爆电机(2020年6期)2020-12-14 07:16:54
中国交通信息化(2020年12期)2020-02-06 09:09:24
中国交通信息化(2020年7期)2020-01-11 12:54:34
理财·市场版(2019年10期)2019-09-10 03:46:13
光学精密工程(2016年3期)2016-11-07 09:03:49
电测与仪表(2016年10期)2016-04-12 00:26:38
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
大电机技术(2015年5期)2015-02-27 08:22:28
电测与仪表(2014年23期)2014-04-04 12:08:30
