基于遗传算法的旋翼无人机危险环境中航迹规划方法
2022-07-02 06:32杨智玲
太原师范学院学报(自然科学版) 2022年2期
杨智玲
(厦门海洋职业技术学院,福建 厦门 361100)
0 引言
无人机(UAV)不需要人工驾驶,只需要通过智能程序实现制动.近年来,一些西方国家认为无人机在战争中具有很高的优势.因此,众多国家在无人机研发上投入了大量资金,从而推动了无人机领域的快速发展[1].同时,部分国家也将无人机应用于气象探测,防灾防火等领域.
旋翼无人机通常适用于不同速度与飞行航路,能够实现自由悬停与垂直起降.同时,旋翼无人机体积较小、隐蔽性强,在起步时不需要弹射器等设备即可实现发射,且飞行高度低,能够执行大量的、不同种类的飞行任务,还能够观察更微小的细节,因此旋翼无人机被广泛应用在不同领域[2].旋翼无人机航迹规划是指获取起始点到目的地的最佳路径,通过航迹规划,减少无人机执行任务的距离[3],降低任务执行时间.
在当前较多规划方法中,遗传算法属于一种较为优秀的算法,该算法能够考虑较多方面,且对约束问题的处理更加完美,适用于解决航迹规划中的复杂问题.有较多学者对航迹规划进行了研究,例如高升等[4]通过混合种群算法完成航迹规划,但该方法规划后的航迹代价较高,不适用于大多任务场景,例如岳秀等[5]研究基于A-Star和改进模拟退火算法的航迹规划方法,但该方法规划后的航迹,无人机执行任务时的飞行时间延长.
为此,本文研究基于遗传算法的旋翼无人机危险环境中航迹规划方法,通过自适应遗传算法完成无人机在危险环境下的航迹规划.
1 旋翼无人机危险环境中航迹规划
1.1 旋翼无人机危险环境中航迹规划建模
1.1.1 旋翼无人机模型
旋翼无人机模型的准确程度与航迹规划的质量密不可分,在进行航迹规划之前,需要充分考虑旋翼无人机自身的特性,例如欧拉角、飞行距离等[6],使旋翼无人机航迹路径能够按照约束规划.
为了合理描述旋翼无人机动态系统,本文需针对机体轴与地球惯性两个坐标系进行详细分析.其中地球惯性坐标系对于地面来说保持不变,但其依附于地球,假设无人机位置上固定点为原点O,在该原点O上的OX、OY、OZ轴构成右手坐标系,Z轴属于高度轴.
本文通过欧拉角描述旋翼无人机的姿态,具体分析俯仰角φ以及偏航角θ.在地球惯性坐标系中,无人机纵轴在OX轴正方向与OXY面内投影的夹角为偏航角;水平面OXY与无人机纵轴的夹角为俯仰角.
本文考虑旋翼无人机位置,将其作为一个质点,当处于t时刻时,通过矢量X(t)表示旋翼无人机的运动状态,并通过公式(1)计算:
X(t)=[x(t),y(t),z(t),θ(t),φ(t)]T
(1)
公式(1)中,无人机位置的坐标分别为x(t)、y(t)、z(t);无人机偏航角状态为θ(t);俯仰角状态为φ(t).
依据质点运动学原理,当处于地球惯性系下,每个坐标系之间存在如下关系:
(2)
公式(2)中,无人机的速度由V表示;偏航角、俯仰角的控制输入依次由η、μ表示.
1.1.2 旋翼无人机机动性能约束
必须按照无人机的动态性能约束完成航迹规划,否则该无人机会在执行任务时发生异常现象[7,8].因此,本文设定旋翼无人机重点动态性能约束,具体情况如下:
1)最远飞行距离约束Lmax:旋翼无人机在飞行时无法携带大量能量,因此所携带的能力会在一定范围内限制飞行距离,为使无人机飞行更加安全,本文对最远飞行距离进行约束.假设在航段{li|i=1,2,...,n}构成旋翼无人机航迹,那么可利用公式(3)表示该约束条件:
(3)
公式(3)中,第i段的飞行距离由‖li‖表示;最远飞行距离由Lmax表示.
2)飞行高度约束H:当旋翼无人机以稳定状态飞行时,由于自身性能的影响,会使飞行高度受限,同时为避免碰撞地面,飞行高度也不宜过低[9],因此,需对无人机的飞行高度进行约束,通过公式(4)表示对飞行高度的约束:
Hmin≤Hi≤Hmax
(4)
公式(4)中,第i个航迹点的高度由Hi表示;最低飞行高度由Hmin表示;最高飞行高度由Hmax表示.
3)最小直飞距离约束Lmin:为使旋翼无人机在飞行过程中更加安全,需在无人机改变姿势之前维持合理的直飞距离,当该距离过低时会导致无人机出现危险,通过公式(5)约束旋翼无人机的最小直飞距离:
‖li‖≥Lmin
(5)
公式(5)中,第i段直线飞行距离由‖li‖描述;最短直飞距离由Lmin描述.
1.2 旋翼无人机飞行环境与等效数字地图建模
在无人机危险环境飞行航迹规划过程中,需要使无人机能够有效避免危险环境的威胁,且在无人机执行飞行任务时需要具备地形跟随能力[10],为此,采用一种威胁建模方法,对无人机执行任务时存在的威胁现象进行数学建模.
1.2.1 旋翼无人机飞行环境建模
1)危险环境基准地形建模
由于旋翼无人机在飞行过程中的地理环境与航路规划问题十分紧密,且在航路规划时不仅要考虑危险环境下的基准地形,还要考虑突出的山峰地貌以及威胁情况,为此,本文采用函数模拟方法,对旋翼无人机飞行过程中的真实地形进行模拟,即通过公式(6)函数表示:
(6)
公式(6)中,在水平面时,模型投影后的点坐标分别为x、y;水平面点相应的高程值由z1描述.常系数分别为a、b、c、d、e、f、g,这些系数负责对数字地图中基准地形变化进行控制,设定不同的常系数,可以实现不同危险环境基准地形的模拟.
2)危险环境山峰建模
针对旋翼无人机飞行过程中危险环境的天然山体,利用指数函数进行建模,并通过公式(7)表示:
(7)
公式(7)中,地图山峰点位置高程值由z2(x,y)描述;第i个山峰中心坐标由(xi,yi)描述;地形参数为hi,其能够对高度进行管理;对于第i个山峰,其x轴与y轴位置上的衰减量由xsi、ysi表示,两者能够控制坡度;全部的山峰数量由n表示,对上述的参数进行设定,能够获取不同形态的山峰.
3)危险环境威胁建模
在进行航迹规划时,需要明确避免危险环境中的威胁,若不注意威胁的影响,会导致规划后的航迹存在较大问题,通过以下形式定义不同威胁分布,假设威胁中心坐标为(xi,yi),i=1,...,M,fi(x,y),(x,y)为威胁程度的空间分布坐标.不同威胁类型对威胁分布fi存在不同定义,本文针对几种情况对威胁分布进行研究:
a.有理数型:
(8)

b.有理光滑型:
(9)
当通过一种光滑型对威胁程度建模时,公式(9)中ai、bi、ci、di均为正,通过该模型,不仅能有效表示实际的物理意义,还能够通过数值实现光滑衰减.
通常情况下,静态威胁的分布可通过公式(10)计算:
(10)
通过公式(10)可以看出,危险环境下的每个威胁均互相独立.因此,本文采用有理光滑型对危险环境下的威胁程度进行建模,实现该环境内的威胁分析.
1.2.2 旋翼无人机飞行环境等效数字地图生成
针对旋翼无人机的飞行范围,本文通过上述方法完成建模后,将其调整为计算机可以处理的数据,之后通过信息融合方式,实现等效地图的构建.
融合危险环境地形、山峰以及威胁的高程信息,并通过公式(11)表示信息融合后的模型:
z(x,y)=max(z1(x,y),z2(x,y),z3(x,y))
(11)
公式(11)中,基准地形内的高度数据由z1(x,y)描述;山峰地形的高度数据由z2(x,y)描述;威胁的高度数据由z3(x,y)描述.
1.3 基于自适应遗传算法的航迹规划
通过自适应遗传算法,能够按照基因编码形式,在旋翼无人机飞行环境等效数字地图中随机生成航迹个体,并对该个体适应度进行计算,按照适应度值可以完成个体的选择、交换以及变异,获取最佳航迹规划.
1.3.1 基因编码设计
通过基因编码能够合理实现种群的进化,且合适的编码手段能够加快种群进化效率.本文通过图1表示本文基因编码方式.
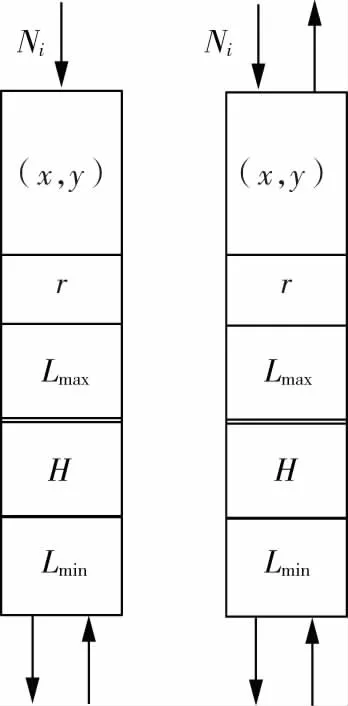
图1 基因编码链式表
图1中,航迹规划后的第i个航迹节点为Ni.其中包括如下内容:
1)危险环境数字地图z(x,y)下生成无人机航迹点坐标(x,y).
2)无人机的航迹点序列r,通常起始点设为0,通过全部航迹点构成完成航迹.
3)最远飞行距离约束Lmax;飞行高度约束H;最小直飞距离约束Lmin.旋翼无人机按照约束内航迹飞行.
1.3.2 航迹代价函数与个体适应度评价
规划飞行航迹是获取一条能够满足约束条件且航程最短的航迹.航迹代价函数是指旋翼无人机在飞行过程中存在的航程函数,当旋翼无人机沿航迹执行任务时,若直飞、平飞距离较大,且爬升、俯冲动作较少,说明无人机的航程越小,则飞行成功的可能性越大.
在自适应遗传算法中,为评价个体的好坏,需对适应度值进行合理分析,通过公式(12)表示适应度评价函数:
(12)
1.3.3 选择、交叉、变异操作
本文通过基于轮转法的选择操作完成规划航迹的选择.在进行个体选择时,通常由适应度决定,当适应度越大,再生的概率也越大,采用如下步骤完成选择:
1)在航迹种群中随机挑选出一个个体.
2)选择算子对该个体进行判定,分析其是否可以再生,若可以再生,则将该个体作为新的个体存放至族群.
3)继续下一个个体查找,直至完成选择.
交叉操作是指通过模拟生物繁殖情况,实现个体之间的交叉组合,制造出最佳的品种.具体交叉操作如下:
4)从种群中随机挑选2条个体.
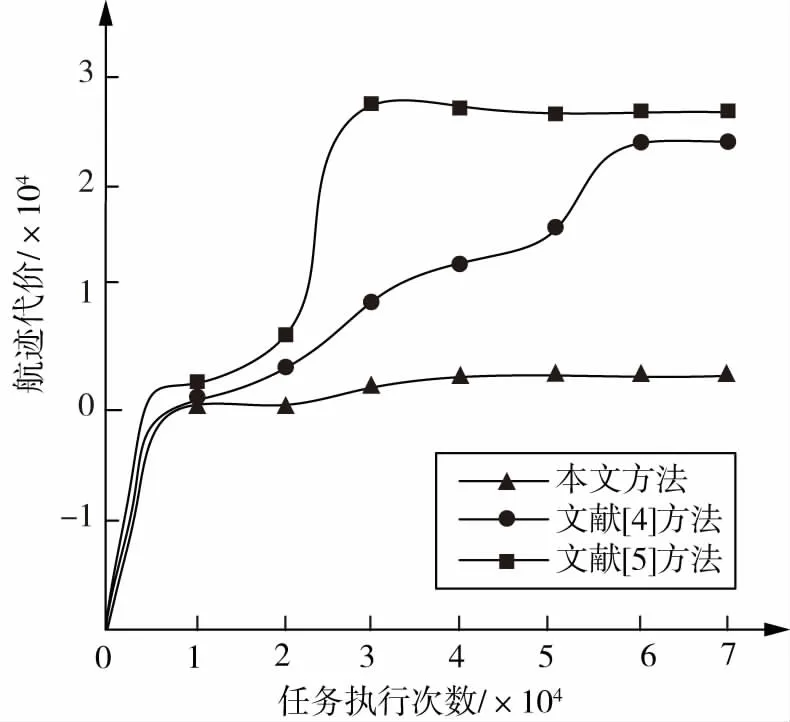
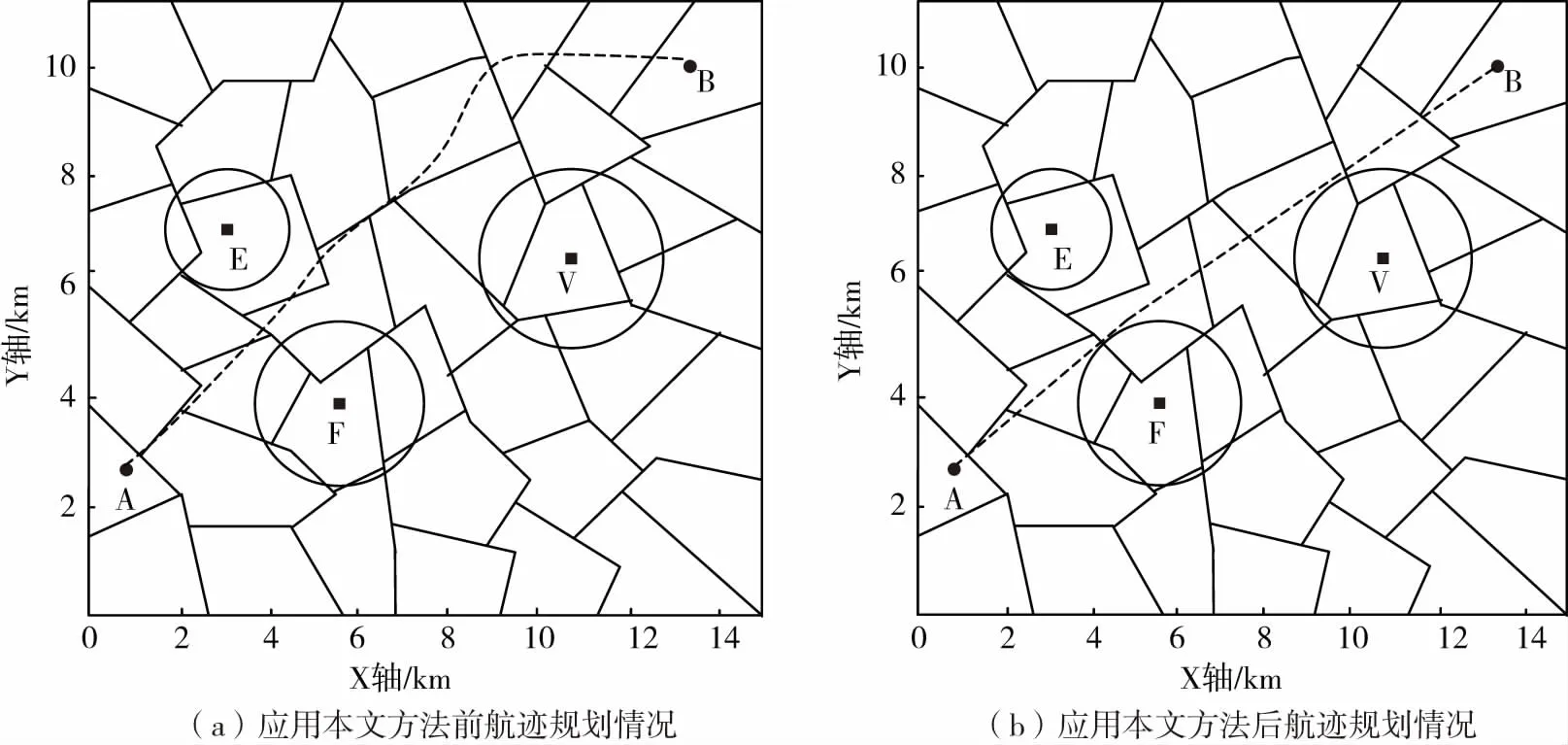
5)假设个体交叉点位置为P且0 6)分析交叉后的新个体是否满足旋翼无人机飞行条件,若满足则将该个体加入种群,若不满足返回上一步继续交叉操作. 7)继续查找,直至实现全部种群的交叉处理. 通过变异操作可以按照较小的概率将个体的遗传基因进行修改.本文通过扰动算子方法,实现航迹的变异操作,具体过程如下: 8)在种群中随机获取个体,将该个体设为突变个体. 9)设随机变异点位置为Q,且0 10)分析变异点能否满足旋翼无人机约束条件,若能满足则将新个体添加到种群中. 11)继续查找,直至完成种群中全部个体的变异处理. 通过上述方式不断寻找出最佳航迹,完成旋翼无人机危险环境下的航迹规划. 为验证本文方法的性能,通过Intel Core i3-2330M CPU 2.20GHzPC机上对本文方法进行仿真实验,仿真软件选取Matlab7.10.0.通过仿真形式模拟危险环境地形地图以及无人机飞行航迹. 选取10个飞行任务,每个任务在飞行时所遇到的禁飞区数量与威胁区数量以及总航程均有所不同,同时选取文献[4]混合种群RRT无人机航迹规划方法、文献[5]基于A-Star和改进模拟退火算法的航迹规划方法作为本文的对比方法进行对比实验,分析不同方法在飞行时的总耗时,分析结果如表1所示. 表1 不同方法飞行耗时分析 根据表1可知,针对不同的威胁数量、禁飞区数量以及总航程来说,本文方法所规划的航迹在执行飞行任务时的耗时始终最低,而文献[4]方法与文献[5]方法的飞行耗时始终高于1 000 ms以上,说明这两种方法规划好的航迹飞行耗时较长,由此可以看出,本文方法规划后的航迹可以有效减少飞行时间,为执行任务提供最低的耗时. 对比三种方法,当执行任务量逐渐加大时,分析三种方法的航迹代价,分析结果如图2所示. 图2 不同方法航迹代价对比 根据图2可知,当任务数量不断增加,三种方法的航迹代价有所上升,其中,文献[5]方法的航迹代价迅速增高,当执行任务数量达到3*104时开始出现轻微下降,而文献[4]方法的航迹代价属于缓慢上升阶段,但上升幅度相对较大,本文方法的航迹代价虽然随着任务次数的增加存在相应的上升,但上升幅度并不明显,且始终未大于1*104,因此,本文方法规划后的航迹能够消耗较低的航迹代价,为任务执行减少消耗. 分析应用本文方法前后所规划的旋翼无人机航迹飞行情况,在地图中,无人机执行某任务需要从A点飞行至B点,其中共存在三处雷达威胁E、F、V,分析本文方法规划的航迹是否可靠,分析结果如图3所示. 图3 应用本文方法前、后航迹规划情况 根据图3(a)可以看出,在未应用本文方法时,无人机为躲避雷达威胁,所执行的航迹更加曲折,导致航迹变长,而应用本文方法后,无人机航迹能够在路径最短的基础上有效避免雷达威胁,实现最短路径下完成飞行任务,由此可知,本文方法所规划的航迹能够达到最短路径. 本文研究基于遗传算法的旋翼无人机危险环境中航迹规划方法,考虑旋翼无人机在危险环境飞行时的约束条件,通过遗传算法规划最佳航迹路径,获取合理的飞行效果.在未来阶段可对当前研究成果进行优化设计,实现多种环境下的旋翼无人机飞行航迹规划.2 实验分析

3 结论
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02军民两用技术与产品(2021年9期)2021-03-09红领巾·探索(2020年5期)2020-05-19青年歌声(2019年12期)2019-12-17电子制作(2019年9期)2019-05-30小学科学(学生版)(2018年9期)2018-09-21北京航空航天大学学报(2017年7期)2017-11-24北京航空航天大学学报(2016年8期)2016-11-16北京航空航天大学学报(2016年6期)2016-11-16文理导航·科普童话(2015年6期)2015-07-29