基于动态矩阵控制的高频链矩阵变换器优化策略研究
2022-07-02 14:14:08邓一凡唐勇奇王培杰贺书航林国汉
湖南工程学院学报(自然科学版) 2022年2期
邓一凡,唐勇奇,王培杰,贺书航,林国汉
(湖南工程学院 电气与信息工程学院,湘潭 411104)
0 引言
矩阵变换器自提出后便衍生出了诸多不同的拓扑结构,如双极式矩阵变换器、基于功率补偿的矩阵变换器、高频链矩阵变换器等.其中,高频链矩阵变换器作为一种新型AC-DC 变换器,具有转换效率高、功率密度高、单位功率因数运行、不需要中间直流电容等优点,并且通过高频变压器实现了电气隔离[1-2].因此,高频链矩阵变换器在风力发电、电池充电、V2G 等领域具有良好的应用前景.
高频链矩阵变换器的常规调制策略是双极性电流空间矢量调制方法(Bipolar Current Space Vector Modulation,B-C-SVM),此方法简单有效,但是抗扰动能力较弱,当输入电压不平衡或者控制器受到轻微干扰时,电流矢量调制比会产生较大变化导致输出功率波动.许多学者在此基础之上提出了改进控制策略,如文献[3]通过补偿理想输入电压占空比与实际输入电压占空比的差值,解决了输出侧电压易受输入侧畸变电压影响的问题;但是,理想占空比的计算容易产生偏差导致控制失效.文献[4]采用基于有源阻尼的无差拍控制器以弥补输入与响应的不匹配,但虚拟电阻参数选取困难,不利于工程实现;文献[5]采用反步控制器方法,实现了对输入电流参考值的跟踪,但控制器参数整定过程烦琐,使系统复杂化.
本文针对高频链矩阵变换器易受干扰信号影响、控制系统复杂等问题,提出一种DMC 优化控制策略,该策略首先利用直流侧电流计算得到参考输出功率,根据参考输出功率和实际输出功率计算得到相对应的控制量和预测输出功率;然后,将控制量施加于dq 分解后的网侧电流,使其作为新的控制矩阵变换器的指令电流.最后通过仿真,验证了该控制策略的有效性.
1 HFLMC工作原理
HFLMC 拓扑结构如图1 所示.其中Ei、Ii(i=a,b,c)为网侧电压、电流,Ri、Li、Ci(i=a,b,c)分别为输入端电阻和滤波电感、电容,ui、ii(i=a,b,c)分别为矩阵变换器输入端电压、电流,L0、C0分别为输出滤波电感、电容,双向开关 Sjk(j=p,b;k=a,b,c),R0为直流侧负载,idc为负载电流.
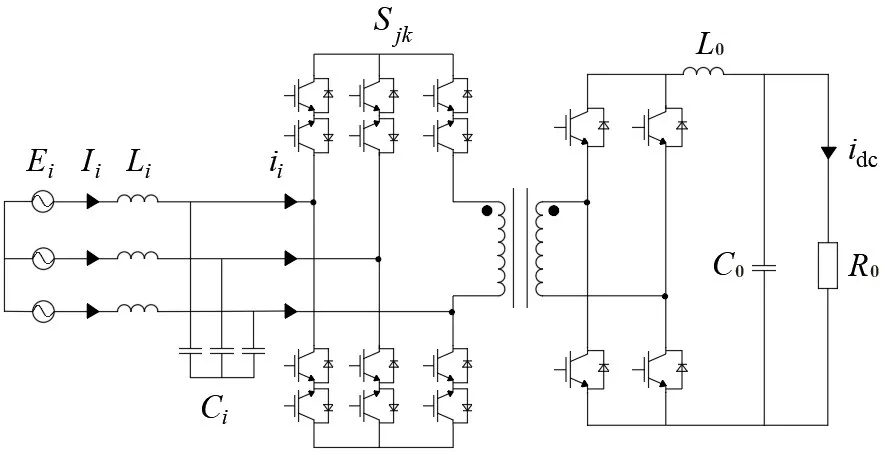
图1 HFLMC拓扑结构
设输入侧指令电流的表达式为:

其中,Iin表示输入侧电流幅值,φ 表示指令电流滞后于输入侧电压的角度.
引入电流调制比m,其表达式为:

由于双向开关Sjk的导通平均值在单位周期内等于其导通占空比 djk[6],于是可得:

并设占空比函数为:
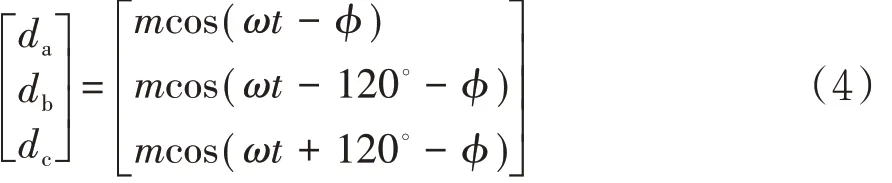
直流侧输出电压Udc通过占空比函数可表示为:
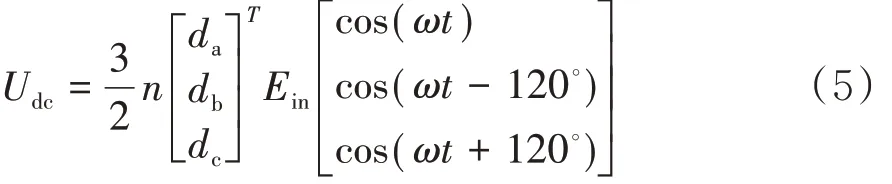
其中,n 为变压器变比,本文设置为1.
将式(4)代入式(5)可得:

由式(6)可知,可以通过控制m、φ 达到控制输出直流电压的目的.
2 动态矩阵控制(DMC)
DMC 是一种基于对象阶跃响应的预测控制算法,通常适用于渐进稳定的线性对象.其算法内容主要包括预测模型、滚动优化、反馈校正三个部分[7].传统的PI 控制由于其控制参数固定不变,难以对复杂的耦合对象实现良好控制,而预测控制要比只依靠模型的一次优化更能适应实际过程,有更强的鲁棒性.
2.1 预测模型
对HFLMC 施加阶跃信号,其直流侧输出功率采样值为ai:

其中,i = 1,…,N.aN定义为近似于系统在阶跃响应后t →∞的稳态值a∞.向量ai描述了HFLMC从零状态到稳态的阶跃响应全过程,因此被称为模型向量,N 为建模时域.
假设系统在不受控制变量及干扰的作用下输出功率初始预测值为y~0(k).则在单个控制增量Δu(k)作用下,未来各时刻的预测值为:

当有 M 个连续的控制增量 Δu(k),…,Δu(k+M-1)作用,未来各时刻的预测值为:

2.2 滚动优化
动态矩阵控制在每一时刻都需要确定接下来的M 个时刻的控制变化量Δu(k),…,Δu(k+M-1),目的是在其作用下控制目标的预测输出值y~M(k + i|k)能够越来越接近设定目标值ω(k+i),i=1,…,P.M 称为控制时域,P 称为预测优化时域.为使系统稳定,要求M≤P≤N.
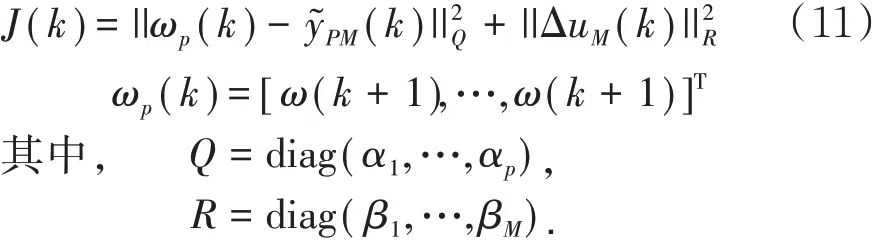
在控制系统中,对于控制变量往往是希望能够平滑地接近期望值ω,尽量避免陡增或者陡减.因此,需要设立性能指标来判断控制变量的变化情况,在适当的时候加以抑制以保证系统的平稳运行.在k 时刻的性能指标J 表示为:

误差系数αi对应着不同时刻输出的跟踪误差,控制系数βj对应不同时刻增量变化的抑制.
性能指标J 的向量形式可表示为:
利用式(9)可以推导出y~M与Δu 的关系,将其转换为向量形式:

其中,

A 是由阶跃响应系数 ai组成的 P×M 矩阵,称为动态矩阵.

其中,CT=[1,...,0]T,为 M 维行向量 .
2.3 反馈矫正
将式(8)转换为向量形式:

为避免只依模型的开环优化累计误差,需要将实际输出与预测输出差构建误差向量e(k+1).

利用这一误差向量通过加权的方式得到修正后的预测输出值y~cor(k + 1)

其中,h 为 N 维校正向量 h =[h1,...,hN]T
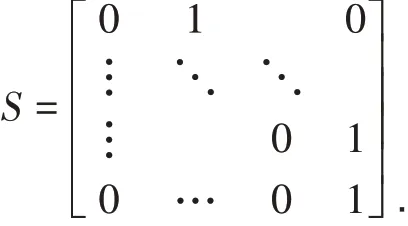
修正后的预测输出值可以通过移位的方式构成下一时刻的初始预测值:

其中,S 为移位矩阵:
整个DMC 的控制过程就是如上所述反复进行的过程.
3 HFLMC系统控制结构
HFLMC 系统控制结构如图2 所示.在对直流侧电流idc采样后,通过PI 控制器输出直流参考电压U*,然后将直流侧电流与参考电压相乘得到参考输出功率P*.将参考输出功率和实际输出功率送至DMC 计算后,输出控制量M.交流侧先通过坐标转换得到dq 轴下的电网电流Id、Iq,再分别与控制量和参考量合成后得到Irefd和Irefq,最后进行坐标逆变换输出Iref作为指令矢量电流控制矩阵变换器.

图2 HFLMC系统控制框图
4 仿真结果与分析
为了验证该控制策略的有效性,搭建了HFLMC模型,并分别在电网电压平衡与A 相电压突降情形下进行了仿真,仿真参数如表1 所示.
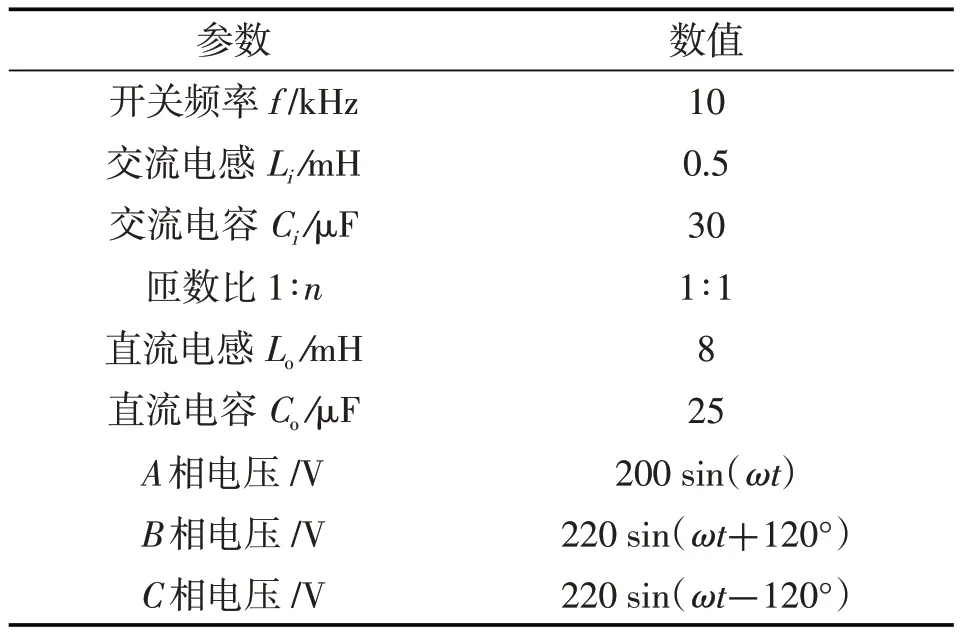
表1 仿真参数
图3 、图4 为电网电压平衡时的仿真图形.从图3 中可以看出,输出电压在启动后短时间内能够达到稳态值,并且严格依照六段式合成模式,在每个电压扇区内输出最大电压值.从图4 中可以看出,实际输出功率能够精确跟随预测输出功率.
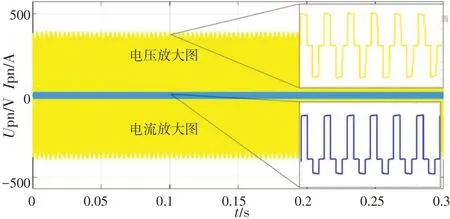
图3 输入平衡时变压器原边输出波形

图4 输入平衡时预测输出功率与实际输出功率
接下来进行在0.1 s 时A 相电压突降仿真,以验证所提控制策略的抗扰动性能.
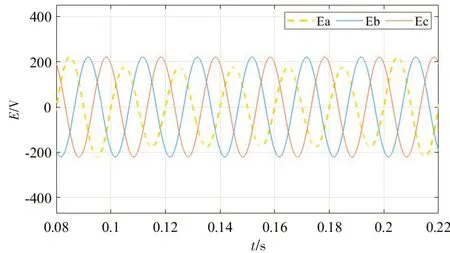
图5 网侧A相电压突降
从图6 可以明显看出,所提出的控制策略在A相电压突降的情况下仍能保持较为光滑的输出曲线,而在PI 控制下输出则会出现明显的波动.

图6 输入电压突降时输出功率对比图
5 结论
本文研究并提出了一种高频链矩阵变换器预测控制策略.仿真结果表明,该控制策略相较于传统的PI 控制拥有更好的输出性能,能够抑制电网突降造成的输出波动,有效地提高了系统抗干扰性能.
猜你喜欢
黑龙江大学自然科学学报(2021年4期)2021-11-19 07:05:06
能源工程(2020年6期)2021-01-26 00:55:22
山东冶金(2019年3期)2019-07-10 00:54:04
消费导刊(2018年10期)2018-08-20 02:57:02
天津教育·下(2018年9期)2018-07-13 08:25:47
通信电源技术(2016年1期)2016-04-16 04:57:26
电测与仪表(2015年21期)2015-04-09 11:52:16
电测与仪表(2015年11期)2015-04-09 11:46:14
燕山大学学报(2014年2期)2014-03-11 15:28:26
电力自动化设备(2013年11期)2013-09-18 02:55:14